外部轴工艺包简介#
机器人应用中,有时需要通过外部轴来扩展机器人的自由度,或者是通过外部轴来变换工件位姿。这些扩展的自由度,或是单独控制,或是需要与机器人联动,此时就需要使用外部轴工艺包,让机器人控制外部轴,以达到更好的控制效果。
适配说明#
外部轴工艺包安装前,需要保证机器人的软件版本适配,及外部轴的驱动器通讯方式具体的:
机器人控制软件版本 |
V3.1.0及以上 |
外部轴电机驱动器通讯 |
EtherCAT 从站,支持4ms 同步位置模式 |
机器人的版本信息,可以在机器人上电后,在“关于”界面中查询到。“关于”界面的打开方式,请见《DUCO CORE-用户手册》第7章节。
外部轴的驱动器适配性需联系外部轴供应商进行确认。
当前版本支持的驱动器型号有:
电机厂商 |
驱动器型号 |
通讯协议 |
|---|---|---|
汇川 |
SV630N |
EtherCAT |
汇川 |
SV660N |
EtherCAT |
世华 |
AD3RE |
EtherCAT |
步科 |
FD144S |
EtherCAT |
由于EtherCAT通讯需要进行拓扑结构适配,如有新型号电机需要进行适配,需联系研发部门,并提供驱动器xml及样品进行配置。
驱动器通讯配置#
使用外部轴与机器人进行EtherCAT通讯时,需要参考《协作机器人用户手册(硬件部分)》,将机器人控制柜的EtherCAT口与外部轴驱动器的EtherCAT_in口,用网线连接。
完成网络连接后,需要参考《协作机器人用户手册(软件部分)》,拓扑管理章节,将对应驱动器的拓扑结构文件导入机器人。
工艺包安装与卸载#
外部轴工艺包文件为“eaxis.plugin”的插件。安装步骤如下所示:
1、将外部轴工艺包放入U盘,U盘要求格式为FAT32
2、机器人系统启动后,在机器人控制柜上,USB接口处插入U盘。

3、使用admin账户登录机器人系统。
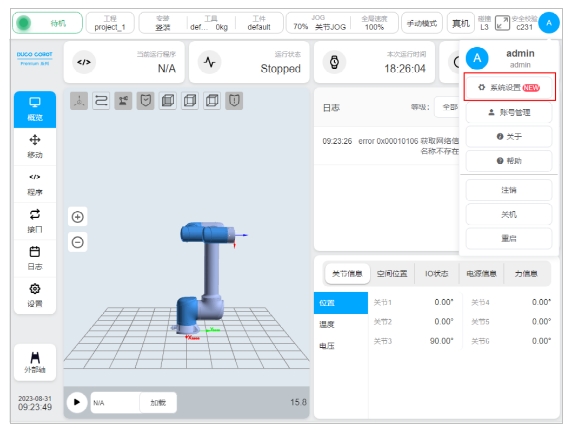
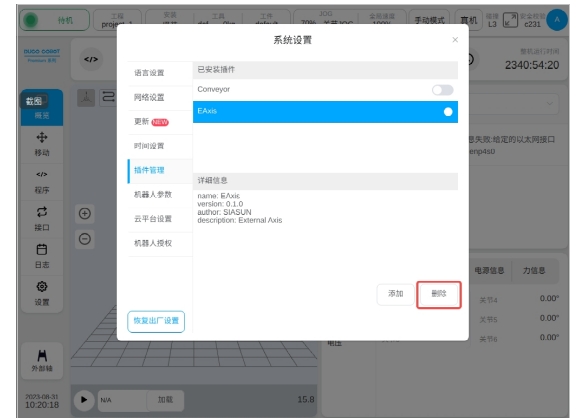
4、点击用户头像,选择系统设置。

5、选择插件管理功能。
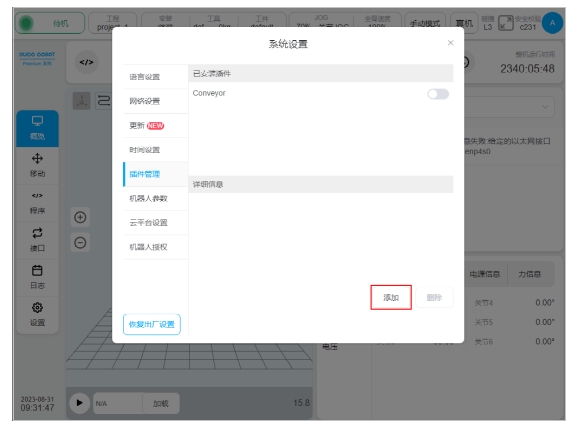
6、点击添加按钮。
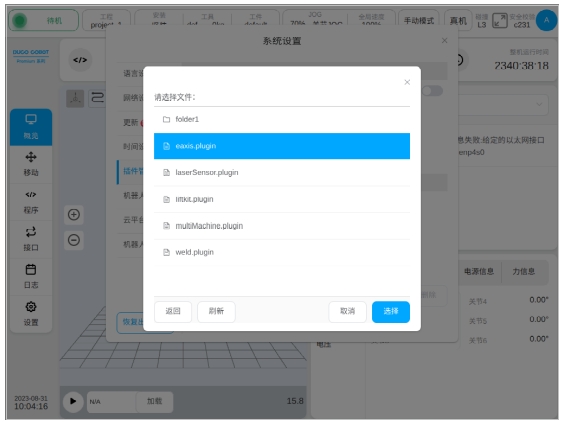
7、选择U盘并从文件列表中,找到并选择“eaxis.plugin”插件包。
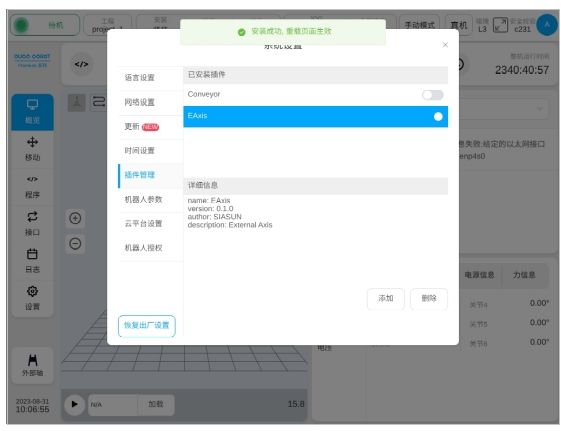
8、插件包安装完成后,如上图所示,将在页面上方弹框提示插件包“安装成功,重载页面生效”。选中已安装插件“Eaxis”,页面下方详细信息处将显示当前插件包的名称,版本信息等内容。
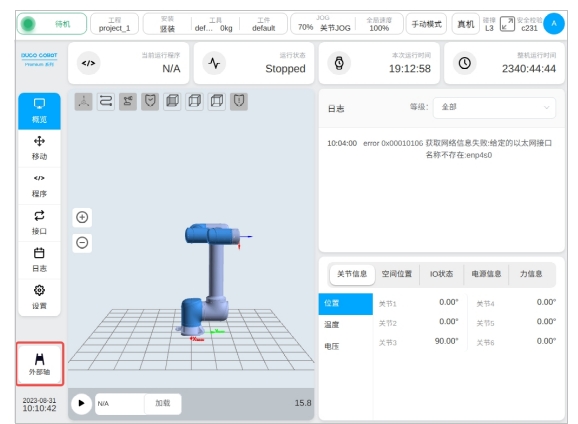
9、外部轴工艺包安装完成后,将在主页面的左下方,出现工艺包配置入口。
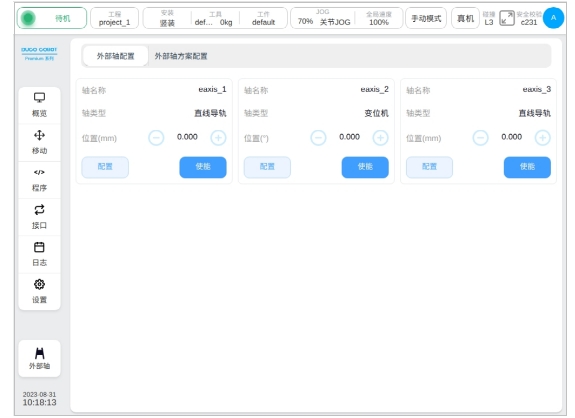
10、点击此工艺包配置入口按钮,即可进入外部轴工艺包配置页面。
11、已安装好的外部轴工艺包,可以通过插件管理页面点击删除按钮,将工艺包彻底删除。