Schnittstelle Seite#
Wenn Sie in der Navigationsleiste auf die Schaltfläche „Schnittstelle“ klicken, wird standardmäßig die Unterseite „E/A“ unter der Schnittstellenseite angezeigt. Unter der Seite „Schnittstelle“ gibt es 6 Unterseiten, darunter E/A, Register, CCI, TCI, TCP/IP und Industriebus. Je nach Schaltschrankmodell gibt es zwei Arten von Seiten, wie in der Abbildung dargestellt:
Geeignet für DC30D-Schaltschrank
Geeignet für DC00 / DC15S-J9 / DC30D-J9 Schaltschrank
Der obere Teil der Seite (1) ist die Unterseite TAB der Schnittstellenseite und der untere Teil (2) ist der Anzeigebereich der entsprechenden Unterseite. Wenn der Benutzer eine andere Unterseitenoption auswählt, entspricht der Bereich ② dem zu dieser Option umgeschalteten Anzeigeinhalt.
IO#
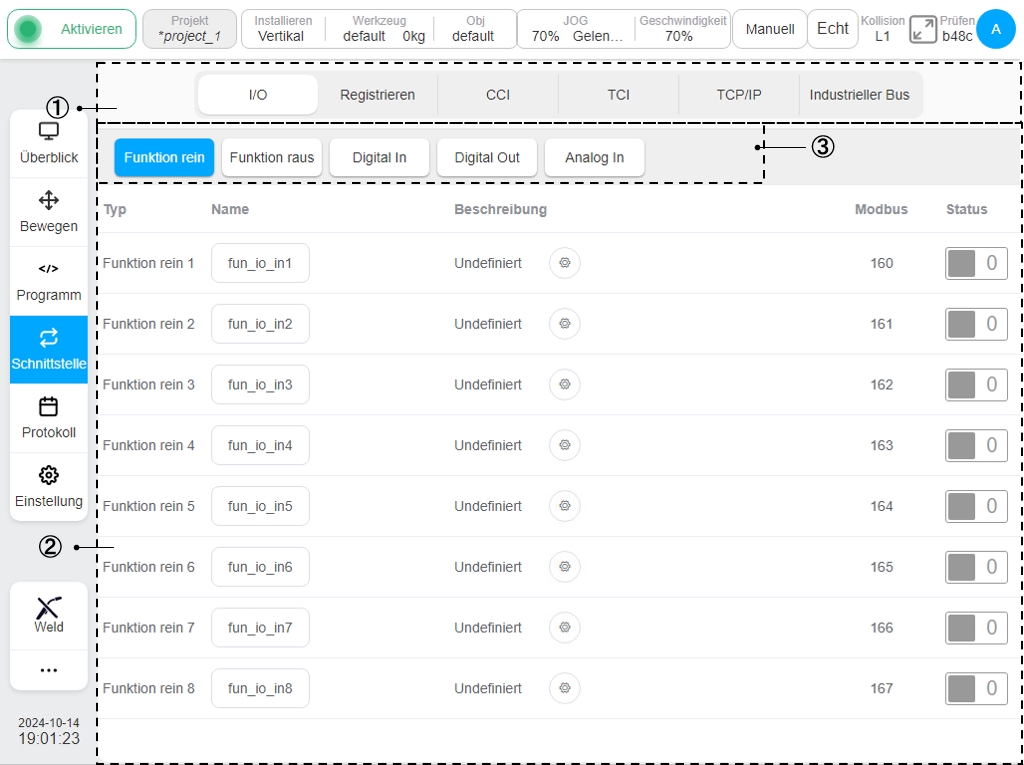
Der Bereich ② in der Abbildung zeigt die entsprechenden Inhalte der verschiedenen Registerkarten der E/A-Unterseite, darüber befindet sich der Anzeigebereich der E/A-Unterseite, ③ ist die Beschriftung unter der E/A-Unterseite für die verschiedenen Ein- und Ausgänge.
Für den DC30D-Schaltschrank gibt es fünf Arten von Funktionseingängen, Funktionsausgängen, allgemeinen Eingängen, allgemeinen Ausgängen und Analogeingängen auf der Unterseite I/O. Klicken Sie auf verschiedene Beschriftungsleisten, um zwischen den fünf Arten von Eingangs- oder Ausgangsstatusinformationen zu wechseln und diese anzuzeigen.
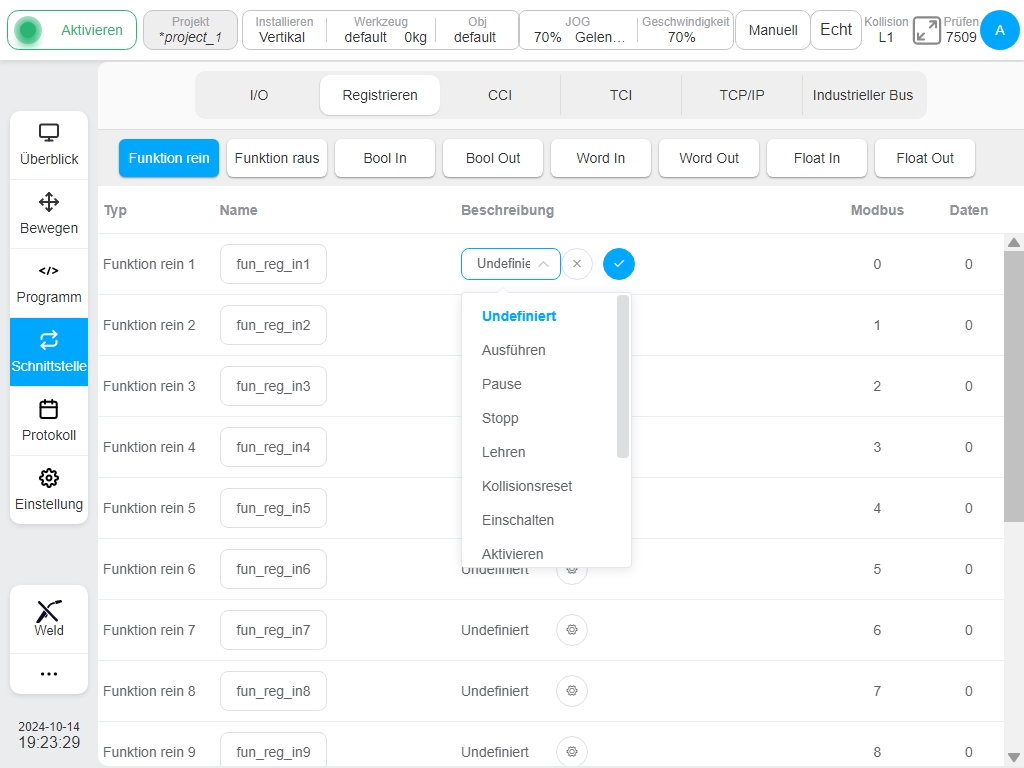
Die Funktionseingangsschnittstelle kann den Status und die grundlegenden Informationen des 8-fachen Digitaleingangs überwachen, der eine bestimmte Funktion im Schaltschrank einstellen kann. Klicken Sie auf eine Funktion, um einen Namen einzugeben. Es wird eine gemeinsame virtuelle Tastatur angezeigt. Der Benutzer kann den Standardnamen der Funktion ändern. Nachdem der Standardname für die Änderungsfunktion eingegeben wurde, wird das in der Abbildung gezeigte Symbol ① rechts neben dem Namensanzeigefeld angezeigt. Klicken Sie auf das Symbol, um den Namen der Funktionseingabe auf den entsprechenden Standardnamen zurückzusetzen.
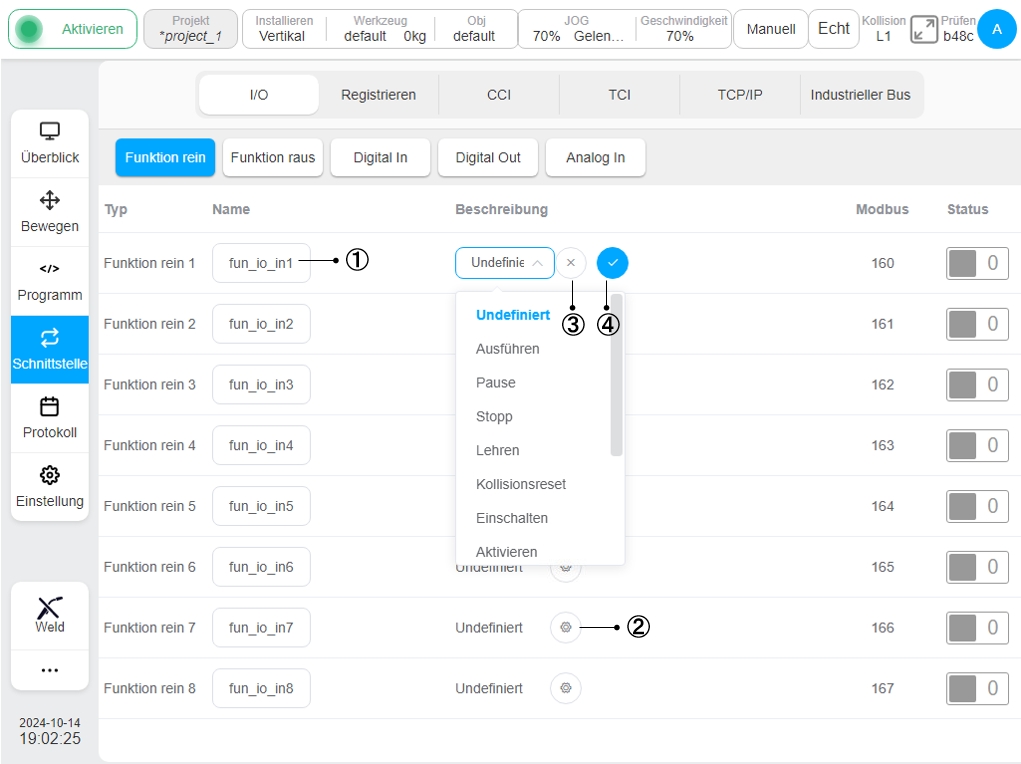
Klicken Sie auf das entsprechende Funktionseingangssymbol ② in der Abbildung, der Funktionseinstellungswähler, das Symbol ③ und das Symbol ④ werden angezeigt und der Benutzer kann die Funktionseinstellungen des Funktionseingangs auswählen. Wählen Sie die Funktion in der Dropdown-Liste für die Auswahl der Anzeigefunktion aus, und geben Sie das Funktionselement ein, das Sie festlegen möchten. Klicken Sie auf das Symbol ④, um das ausgewählte Funktionselement zu bestimmen. Sie können die Auswahl des ausgewählten Features auch aufheben, indem Sie auf das Symbol ③ klicken. Wenn das Funktionseingangssignal ausgelöst wird, wird die Set-Funktion aktiviert. Derzeit unterstützt der Funktionseingang die folgenden Funktionen: Ausführen , Pause, Stopp , Lehren, Kollisionsreset, Einschalten, Aktivieren, Deaktivieren, Ausschalten, Herunterfahren, Position aufzeichnen, Startposition, Abbruch der Bewegung.
Bemerkung
Ausführen, Pause, Stopp, Abbruch der Bewegung wird durch Triggersignale der steigenden Flanke ausgelöst.
Bemerkung
Der Befehl „Verschieben abbrechen“ wirkt sich nur dann auf die Verschiebeaufgabe aus, die gerade vom Roboter ausgeführt wird, wenn das Befehlssignal ausgelöst wird. Wenn ein Programm ausgeführt wird, werden die folgenden Skripts kontinuierlich ausgeführt.
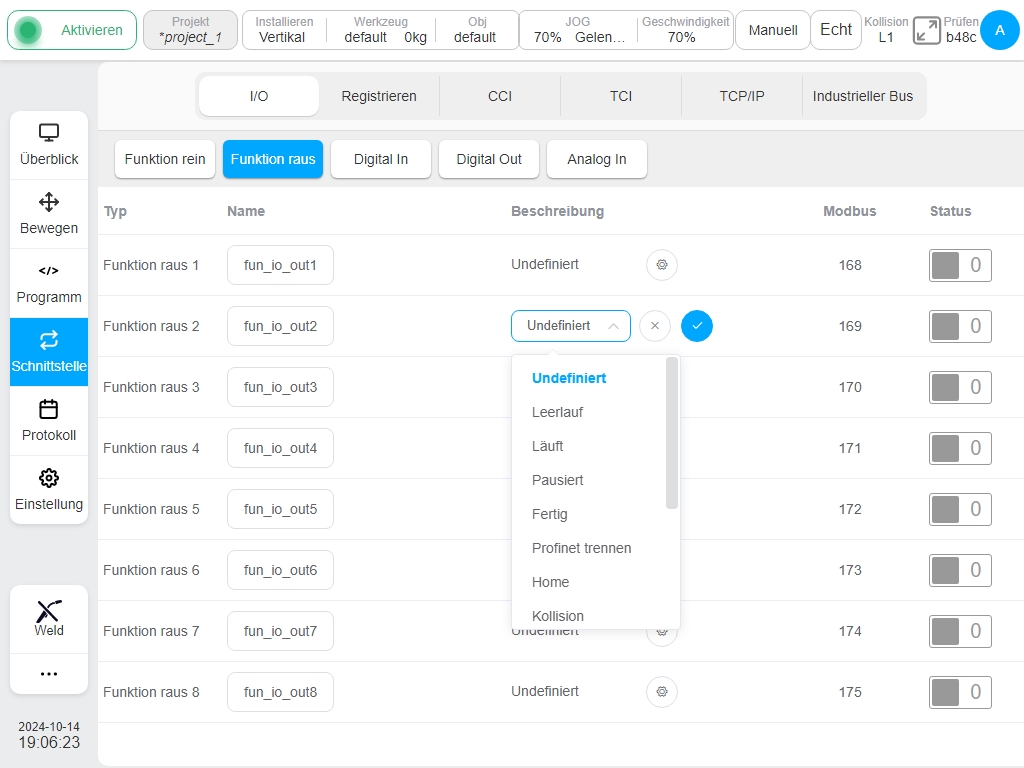
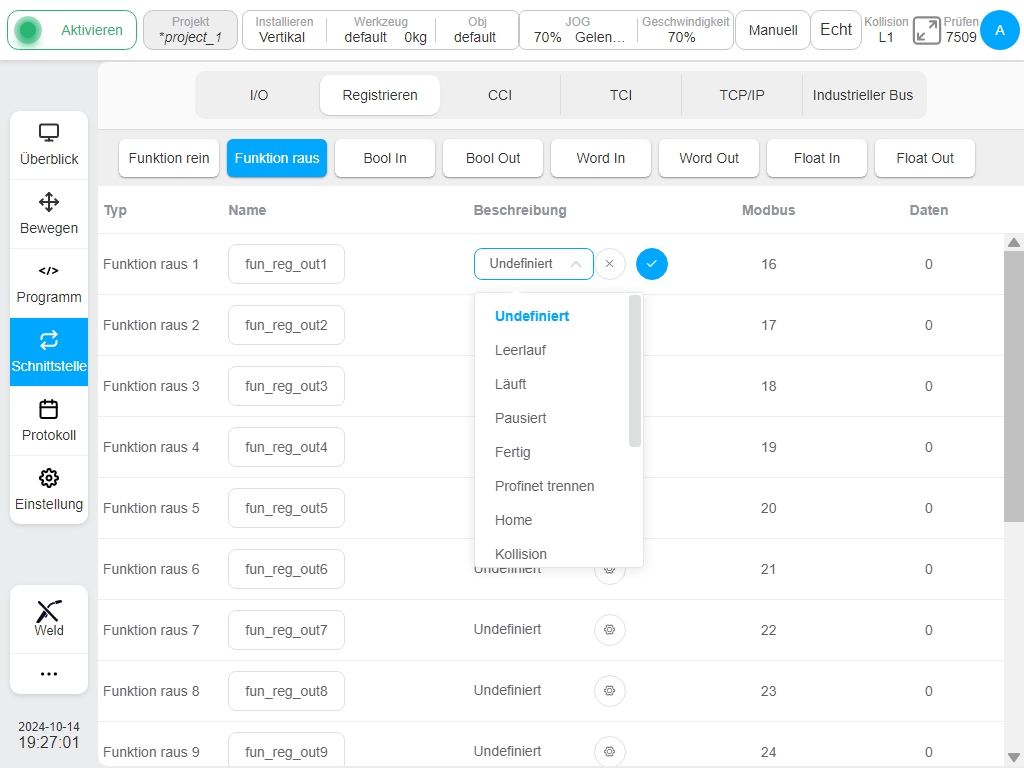
Die Funktionsausgangsschnittstelle kann den Status und grundlegende Informationen des 8-Wege-Digitalausgangs überwachen, mit dem eine bestimmte Funktion im Schaltschrank eingestellt werden kann, wie in der Abbildung gezeigt. Ähnlich wie bei der Funktionseingabeschnittstelle können Sie den entsprechenden Namen der Funktionsausgabe ändern und die Funktionseinstellungen der Funktionsausgabe auswählen. Wählen Sie im Dropdown-Feld für die Auswahl der Funktionseinstellungen die vordefinierte Systemstatusmenge aus, die an die Funktionsausgabe gebunden ist. Nach dem Klicken auf das Symbol „OK“ wird in der Ausgabe der Funktion der Status der eingestellten Systemstatusmenge angezeigt. Gegenwärtig unterstützt der Funktionsausgang die Bindungszustände: Leerlauf, Läuft, Pausiert, Fertig, Profinet trennen, Home, Kollision, Auto-Modus, Ausschalten, Deaktivieren, Roboter bewegt sich, Ethernet trennen, Roboterstromversorgung, Handhabung, Bewegung abgebrochen.
Bemerkung
Das Signal „Aufgabe verschieben abgebrochen“ ist nur dann wahr, wenn der Roboter gerade eine Bewegungsaufgabe ausführt und die Bewegungsaufgabe durch einen Befehl zum Abbruch der Bewegungsaufgabe von der Funktion IO-Eingabe, der Funktionsregistereingabe oder einer anderen Schnittstelle abgebrochen wird. Das Signal „Task verschieben abgebrochen“ kann nur durch Zurücksetzen des Funktions-E/A-Eingangs oder des Funktionsregistereingangs zurückgesetzt werden, der als Quelle für den Befehl zum Abbruch der Bewegungsaufgabe konfiguriert ist, und der Funktions-E/A-Ausgang wird gleichzeitig auf niedrig zurückgesetzt.
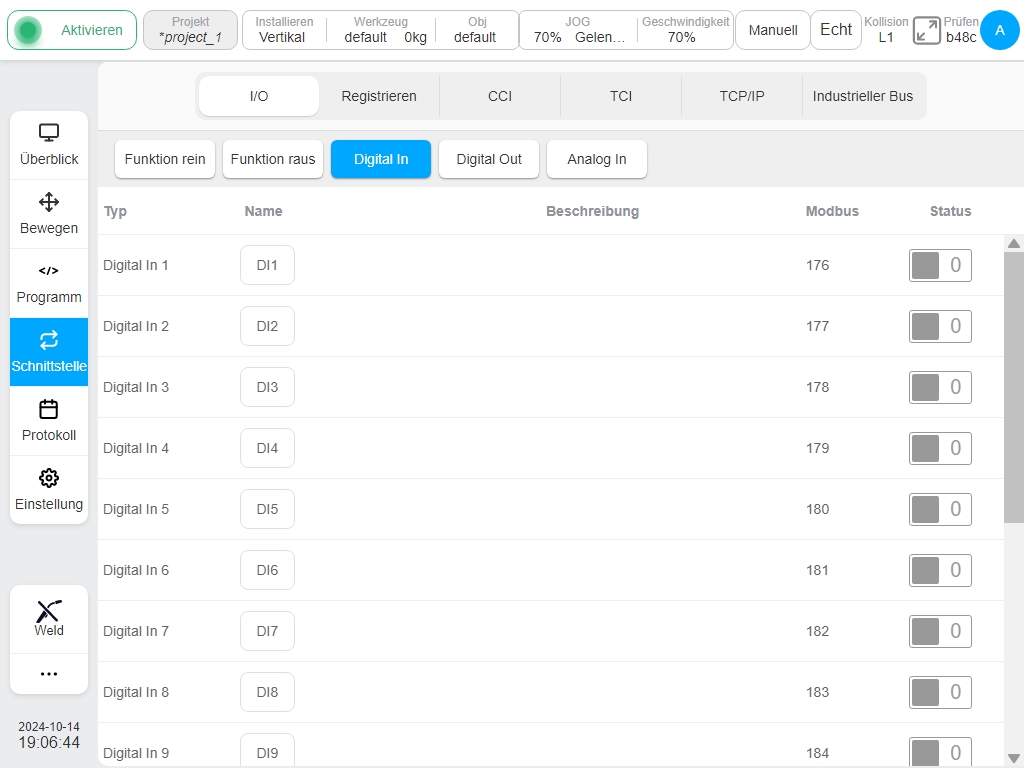
Die allgemeine Eingangsschnittstelle kann den Status und die grundlegenden Informationen des gewöhnlichen 16-fachen Digitaleingangs im Schaltschrank überwachen, wie in der Abbildung dargestellt. Im Gegensatz zu den Funktions-Eingangs- und Funktions-Ausgangsschnittstellen können nur der entsprechende Name und die geänderte Rückgewinnung des Eingangssignals geändert werden; spezifische Funktionen können nicht eingestellt werden.
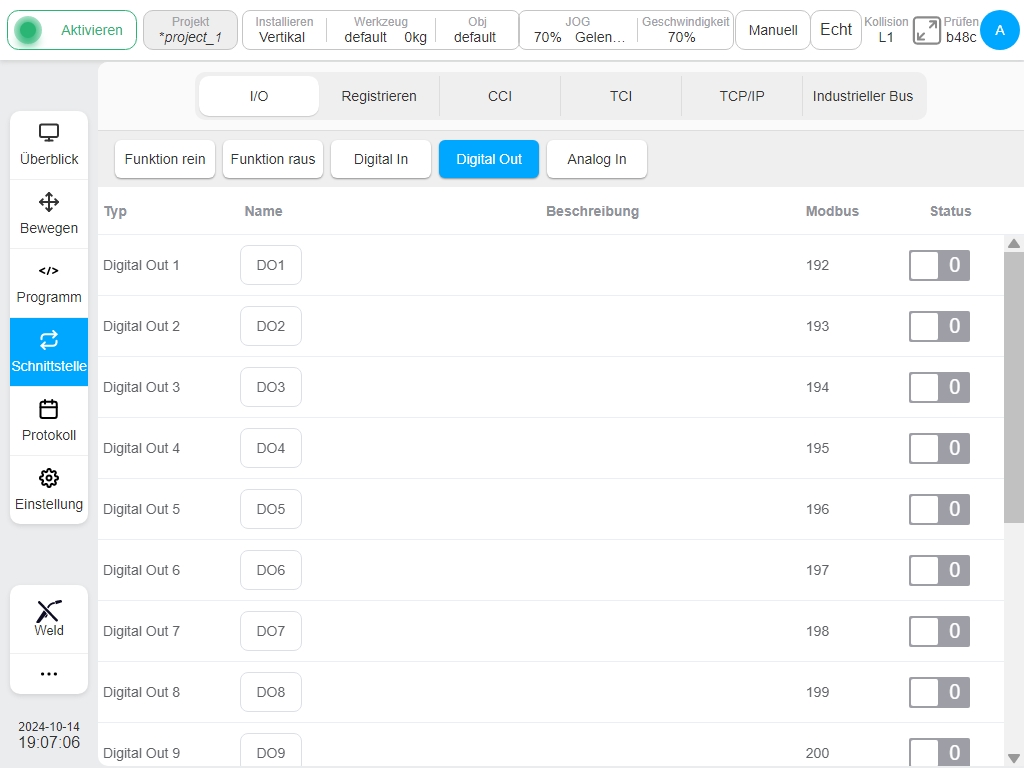
Die allgemeine Ausgangsschnittstelle kann den Status und die grundlegenden Informationen des normalen 16-Kanal-Digitalausgangs im Schaltschrank überwachen, wie in der Abbildung dargestellt. Die Schnittstelle kann nur den entsprechenden Namen ändern und das Ausgangssignal nach der Änderung wiederherstellen, aber keine spezifischen Funktionen einstellen.
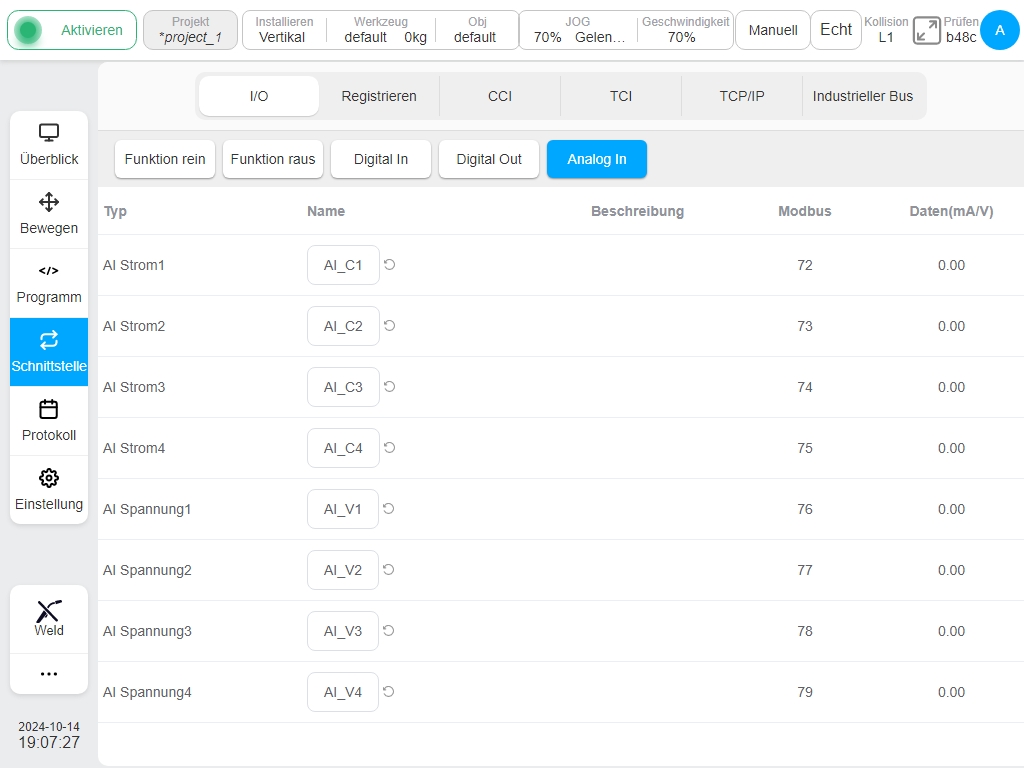
Die analoge Schnittstelle kann 4 analoge Stromeingangssignale und 4 analoge Spannungseingangssignale überwachen, wie in der Abbildung gezeigt. Klicken Sie in ähnlicher Weise auf das Anzeigefeld für den Namen des analogen Eingangssignals, um den Signalnamen zu ändern. Die Vorgänge sind ähnlich wie bei den oben beschriebenen funktionalen E/A und generischen E/A und werden hier nicht wiederholt.
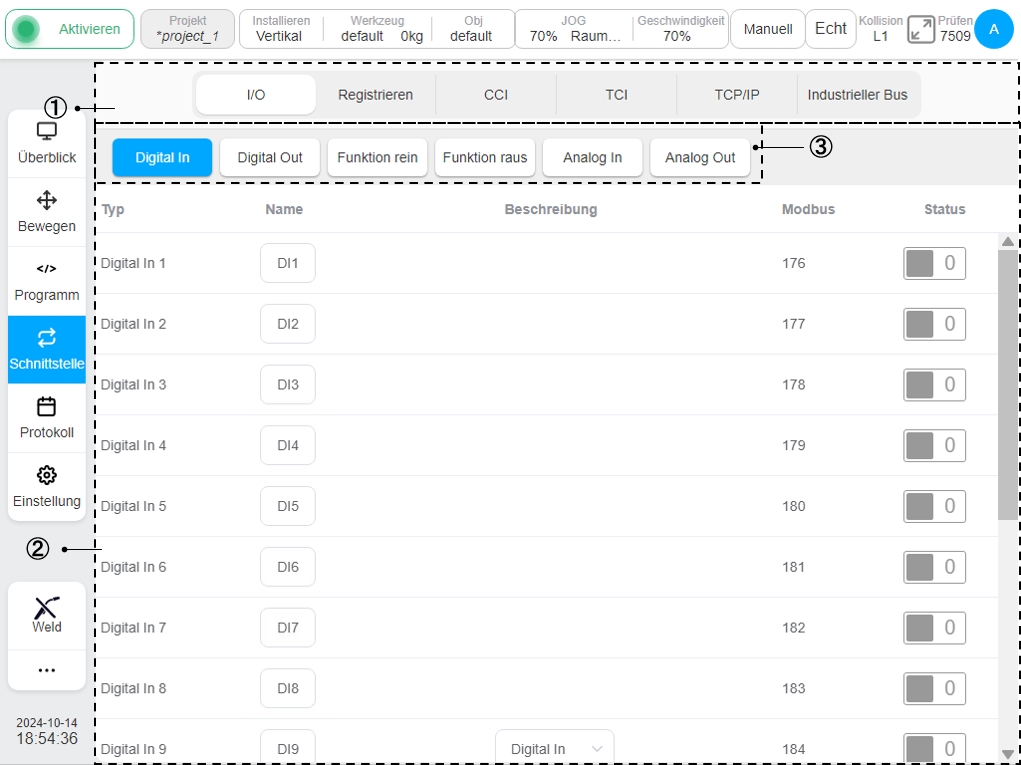
Für DC00 / DC15S-J9 / DC30D-J9 Schaltschränke gibt es sechs Arten von allgemeinen Eingängen, allgemeinen Ausgängen, Funktionseingängen, Funktionsausgängen, Analogeingängen und Analogausgängen auf der Unterseite E/A. Klicken Sie auf die verschiedenen Beschriftungsleisten, um zwischen den sechs Arten von Eingangs- oder Ausgangsstatusinformationen zu wechseln und diese anzuzeigen.
Die allgemeine Eingangsschnittstelle kann den Status und die grundlegenden Informationen des gewöhnlichen 16-fachen Digitaleingangs im Schaltschrank überwachen, wie in der Abbildung dargestellt. Die acht digitalen Eingangstypen DI9 bis DI16 können als Funktionseingang oder allgemeiner Eingang in der Beschreibungsspalte ① der Seite konfiguriert werden.
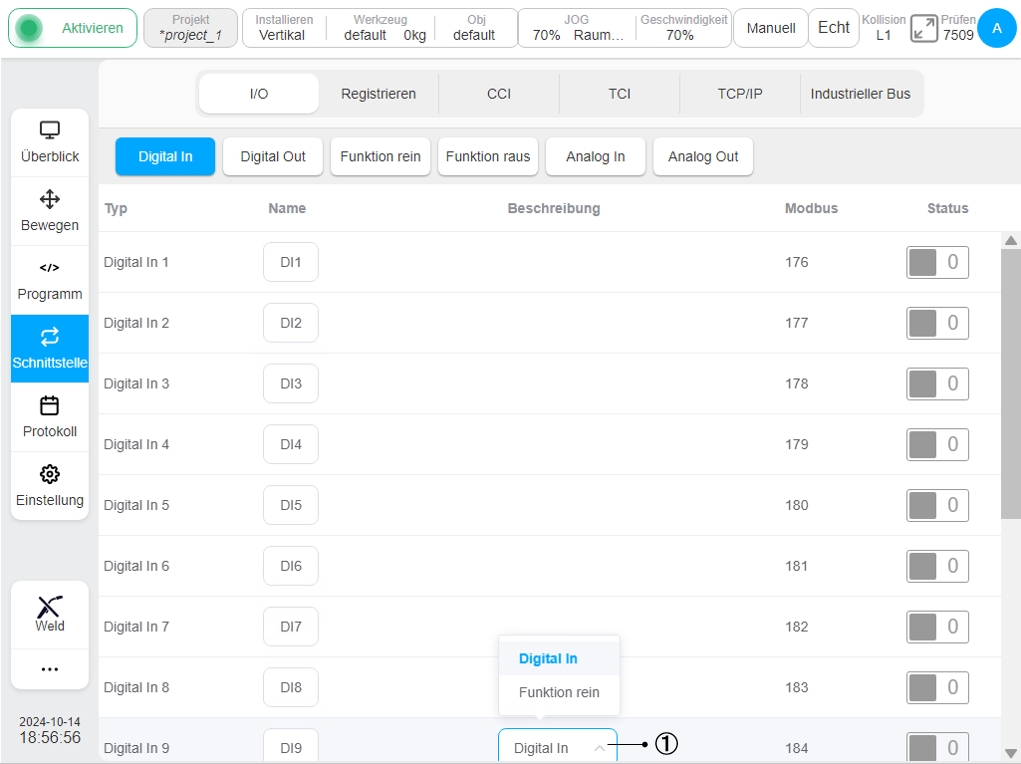
Wenn der Benutzer jeden Zifferneingang als Funktionseingang auswählt, wird der Zifferneingangsstatus auf der Seite E/A Allgemeiner Eingang deaktiviert und der als Funktionseingang konfigurierte Zifferneingangsstatus wird auf der Unterseite Funktionseingang angezeigt. Wenn z. B. DI9 und DI10 als Funktionseingang konfiguriert sind, wird die TAB-Seite für den Funktionseingang auf der E/A-Unterseite wie in der folgenden Abbildung gezeigt.

In ähnlicher Weise wird durch Anklicken eines Funktionseingangsnamens eine normale virtuelle Tastatur aufgerufen, und der Benutzer kann den Standardnamen des Funktionseingangs ändern. Nachdem Sie den Standardnamen für die geänderte Funktion eingegeben haben, wird das Symbol ① in der obigen Abbildung auf der rechten Seite des Namensanzeigefeldes angezeigt. Klicken Sie auf das Symbol, um den Namen der Funktionseingabe auf den entsprechenden Standardnamen zurückzusetzen.
Klicken Sie auf das entsprechende Funktionseingangssymbol ② in der Abbildung. Der Funktionseinstellungsselektor, das Symbol ③ und das Symbol ④ werden angezeigt, und Sie können die Funktionseinstellungen des Funktionseingangs auswählen. Wählen Sie die Funktion im Dropdown-Feld für die Anzeigefunktion aus und geben Sie die einzustellende Funktion ein. Klicken Sie auf das Symbol ④, um die ausgewählte Funktion zu bestimmen. Der Benutzer kann die ausgewählte Funktion auch durch Anklicken des Symbols ③ abwählen. Wenn das Funktionseingangssignal ausgelöst wird, wird die eingestellte Funktion aktiviert. Der aktuelle Funktionseingang unterstützt die folgenden Funktionen: Ausführen , Pause, Stopp , Lehren, Kollisionsreset, Einschalten, Aktivieren, Deaktivieren, Ausschalten, Herunterfahren, Position aufzeichnen, Startposition, Abbruch der Bewegung.
Bemerkung
Ausführen, Pause, Stopp, Abbruch der Bewegung werden durch Triggersignale mit steigender Flanke ausgelöst.
Die universelle Ausgangsschnittstelle kann den Status und die grundlegenden Informationen des normalen 16-Kanal-Digitalausgangs im Schaltschrank überwachen, wie in der Abbildung dargestellt. Die digitalen Eingangstypen DO9-DO16 können als Funktionseingang oder allgemeiner Eingang in der Beschreibungsspalte ① der Seite konfiguriert werden.

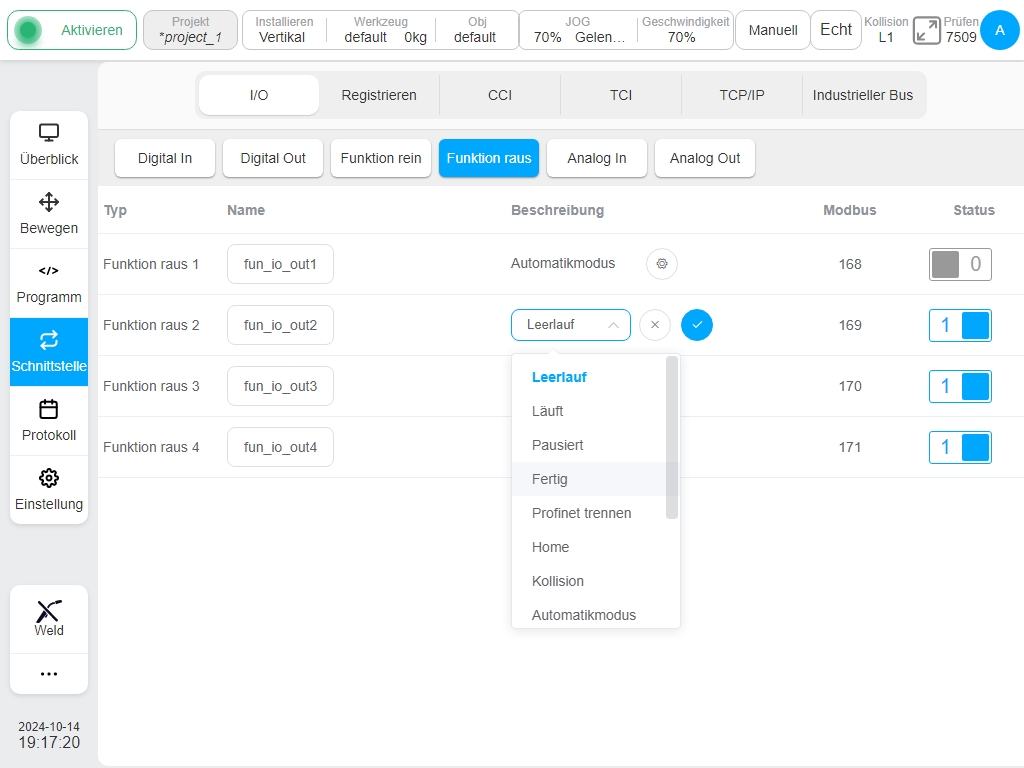
Wenn ein allgemeiner Digitalausgang als Funktionsausgang ausgewählt ist, wird der Digitalausgang dieses Pfads auf der Seite E/A Allgemeiner Ausgang als deaktiviert angezeigt, und der Digitalstatus jedes als Funktionsausgang konfigurierten Pfads wird auf der Unterregisterkarte Funktionsausgang angezeigt. Zum Beispiel sind DO9, DO10, DO11 und DO12 als Funktionsausgang konfiguriert. Die folgende Abbildung zeigt die TAB-Seite „Funktionsausgang“ der Unterseite „I/O“.
Klicken Sie wie bei der Funktionseingabe TAB auf den Namen der Funktionsausgabe, und es wird eine gemeinsame virtuelle Tastatur angezeigt. Der Benutzer kann den Standardnamen des Funktionsausgangs ändern. Nachdem der Standardname des Funktionsausgangs geändert wurde, wird das Symbol ① in der obigen Abbildung auf der rechten Seite des Namensanzeigefeldes angezeigt. Klicken Sie auf das Symbol, um den Namen des Funktionsausgangs auf den Standardnamen zurückzusetzen.
Klicken Sie auf das entsprechende Funktionsausgangssymbol ② in der Abbildung. Der Funktionseinstellungsselektor, das Symbol ③ und das Symbol ④ werden angezeigt, und die Funktionseinstellungen des Funktionsausgangs können ausgewählt werden. Wählen Sie im Dropdown-Feld „Funktionsauswahl anzeigen“ die Funktion aus, die für den Funktionsausgang eingestellt werden soll. Klicken Sie auf das Symbol ④, um die ausgewählte Funktion zu bestimmen. Der Benutzer kann die ausgewählte Funktion auch durch Anklicken des Symbols ③ abwählen. Wenn das Signal des Funktionsausgangs ausgelöst wird, wird die eingestellte Funktion gestartet. Derzeit unterstützt der Funktionsausgang die folgenden Funktionen: Ruhezustand, Programmablauf, Pausenzustand, Programmende, Profinet-Trennung, Grundstellung, Kollision, Automatikmodus, nicht eingeschaltet, nicht aktiviert, Roboterbewegung, Ethernet/ip-Trennung, Roboter 48V-Stromversorgungsstatus.
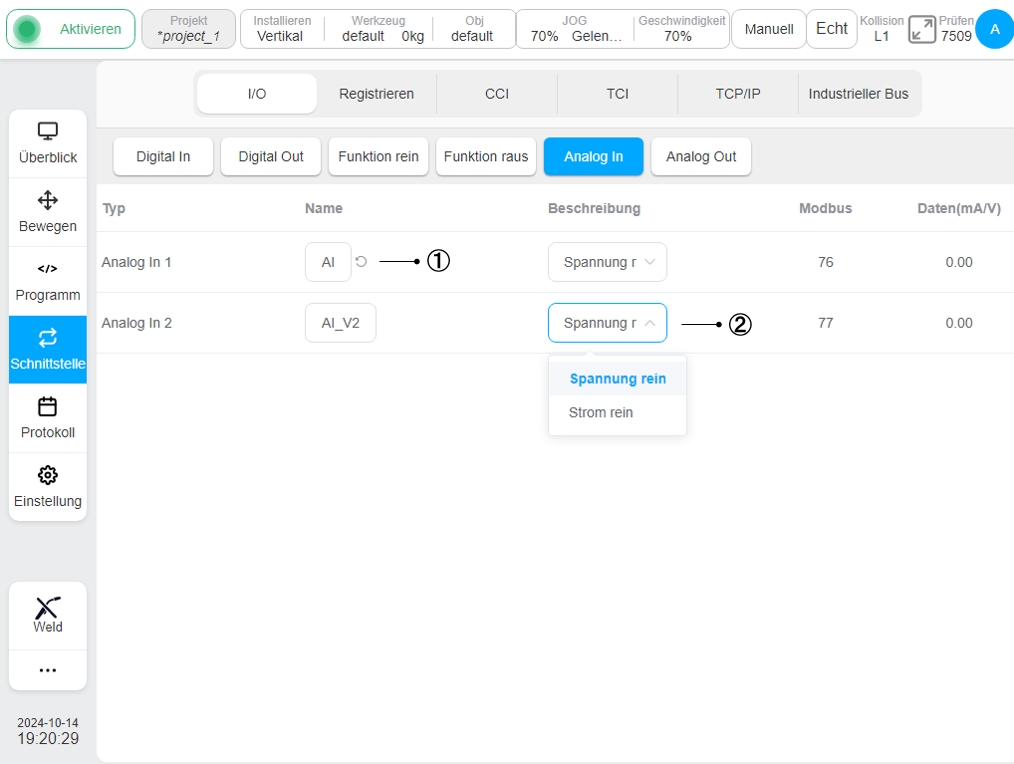
Die Analogeingangsschnittstelle kann 2 analoge Eingangssignale überwachen, wie in der Abbildung gezeigt. Klicken Sie in ähnlicher Weise auf das Anzeigefeld für den Namen des analogen Eingangssignals, um den Signalnamen zu ändern. Nach dem Ändern des Standardnamens des Analogeingangs wird das Symbol ① in der Abbildung auf der rechten Seite des Namensanzeigefeldes angezeigt. Klicken Sie auf das Symbol, um den Namen des Analogeingangs auf den entsprechenden Standardnamen zurückzusetzen. Das analoge Eingangssignal kann in der Beschreibungsspalte durch das Symbol ② erklärt werden, um den Spannungs- oder Stromeingang auszuwählen.
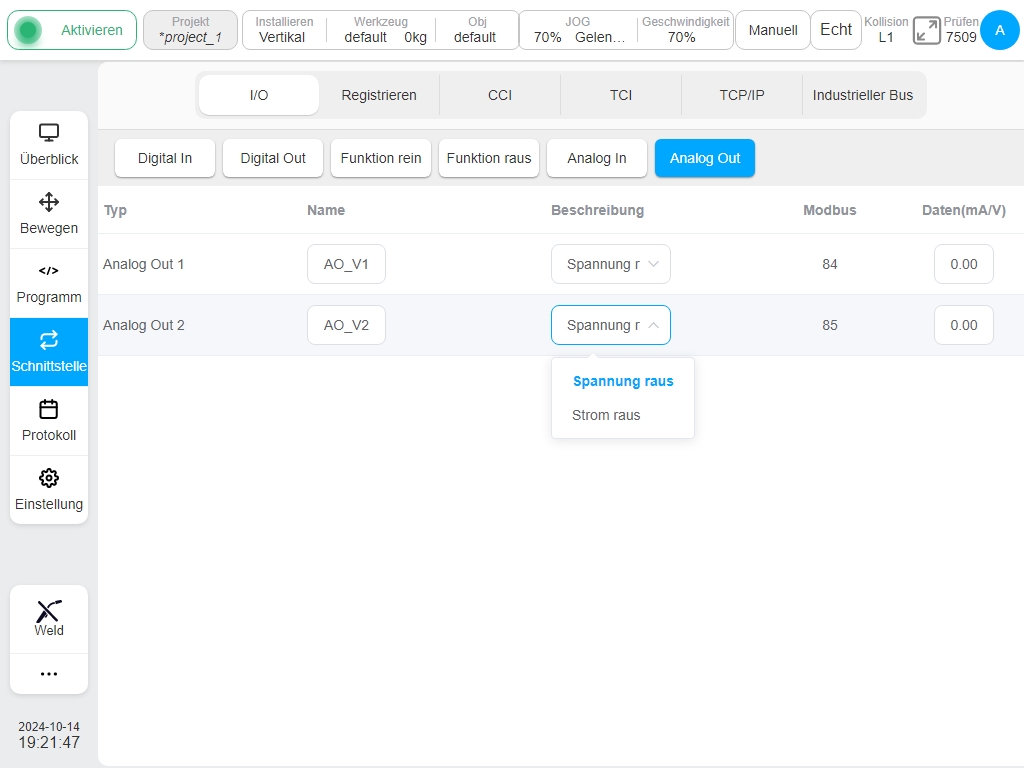
Die Analogausgangsschnittstelle kann 2 analoge Ausgangssignale überwachen, wie in der Abbildung gezeigt. Klicken Sie in ähnlicher Weise auf das Anzeigefeld für den Namen des analogen Eingangssignals, um den Signalnamen zu ändern. Der Vorgang ist ähnlich wie bei der oben beschriebenen analogen Eingabe und wird hier nicht wiederholt. Und das analoge Ausgangssignal kann in der Beschreibungsspalte Konfigurationsauswahl erklärt werden, der Benutzer kann den Spannungsausgang oder Stromausgang wählen.
Register#
Die Register-Unterseite ist ähnlich wie die E/A-Unterseite, der obere Teil der Seite ist für verschiedene Arten von Eingängen und Ausgängen beschriftet, nämlich Funktions-Eingänge, Funktions-Ausgänge, Bool-Eingänge, Bool-Ausgänge, Word-Eingänge, Word-Ausgänge, Float-Eingänge und Float-Ausgänge, insgesamt 8 Typen. Klicken Sie auf die verschiedenen Registerkarten, um die Anzeige der acht Typen von Eingangs- oder Ausgangsdateninformationen umzuschalten.
Die Schnittstelle für die Registerfunktionseingabe kann die Statusinformationen von 16 Funktionseingangsregistern im Roboter überwachen, wie in der Abbildung dargestellt. Wie bei der Funktionseingabe der E/A-Unterseite kann der Name der Funktionseingabe geändert und nach der Änderung wiederhergestellt werden, und es können spezifische Funktionen für diese Art von Registersignal eingestellt werden. Die derzeit von der Registerfunktions-Eingabe unterstützten Funktionen sind die gleichen wie die Funktionen zur Unterstützung der Funktionseingabe auf der obigen E/A-Unterseite.
Die Registerfunktionsausgabeschnittstelle kann die Statusinformationen von 16 Funktionsausgaberegistern im Roboter überwachen, wie in der Abbildung gezeigt. Wie der Funktionsausgang der I/O-Unterseite kann auch der Name des Funktionsausgangs geändert und nach der Modifikation wiederhergestellt werden, und das Klassenregistersignal kann an eine bestimmte, vom System vordefinierte Zustandsgröße gebunden werden. Gegenwärtig sind die Bindungszustände, die von der Ausgabe der Registerfunktion unterstützt werden, folgende: Leerlauf, Läuft, Pausiert, Fertig, Profinet trennen, Home, Kollision, Auto-Modus, Ausschalten, Deaktivieren, Roboter bewegt sich, Ethernet trennen, Roboterstromversorgung, Handhabung, Bewegung abgebrochen.
Bemerkung
Das Signal „Aufgabe verschieben abgebrochen“ ist nur dann wahr, wenn der Roboter gerade eine Bewegungsaufgabe ausführt und die Bewegungsaufgabe durch einen Befehl zum Abbruch der Bewegungsaufgabe von der Funktion IO-Eingabe, der Funktionsregistereingabe oder einer anderen Schnittstelle abgebrochen wird. Nur das Signal „Task verschieben abgebrochen“ kann durch Zurücksetzen des Funktions-E/A-Eingangs oder des Funktionsregistereingangs zurückgesetzt werden, der als Quelle für den Befehl zum Abbruch der Bewegungsaufgabe konfiguriert ist, und der Funktionsregisterausgang wird gleichzeitig auf niedrig zurückgesetzt.
Register-Bool-Eingangsschnittstelle Zeigt die Statusinformationen von 64 booleschen Eingangsregistern an. Die Schnittstelle kann den Registernamen nach der Änderung ändern und wiederherstellen, kann aber keine spezifischen Funktionen einstellen.
Register Bool Output interface Zeigt die Statusinformationen von 64 booleschen Ausgangsregistern an. Ebenso kann die Schnittstelle nur Registernamen ändern und nach der Änderung wiederherstellen, aber keine spezifischen Funktionsposten einstellen.
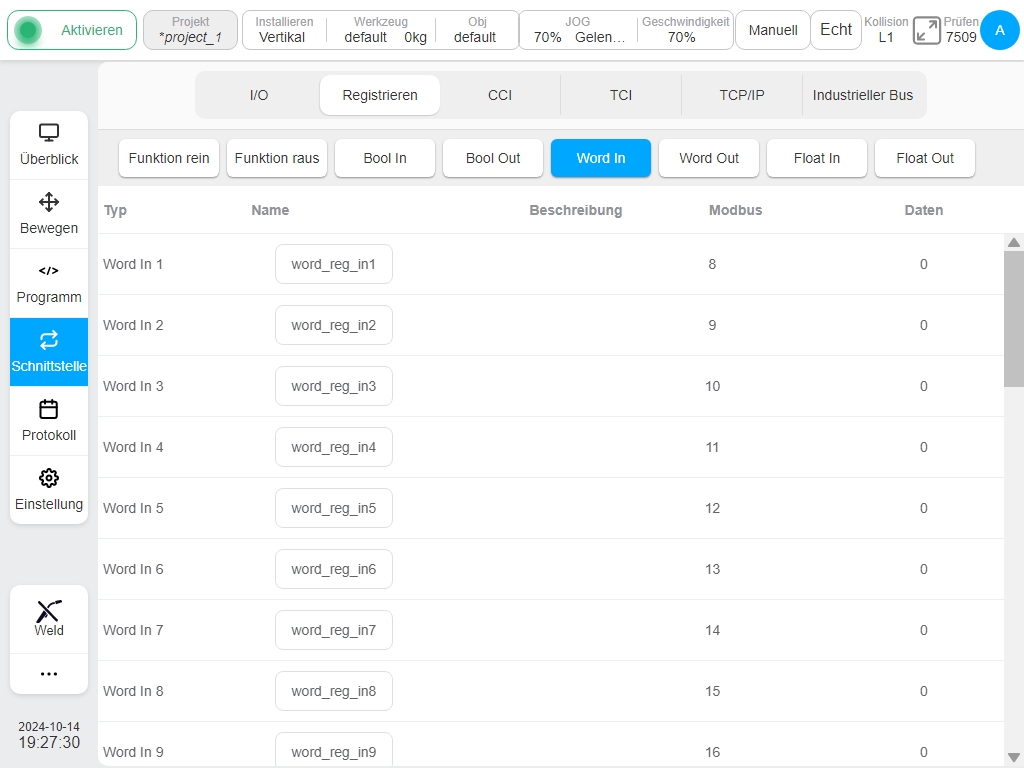
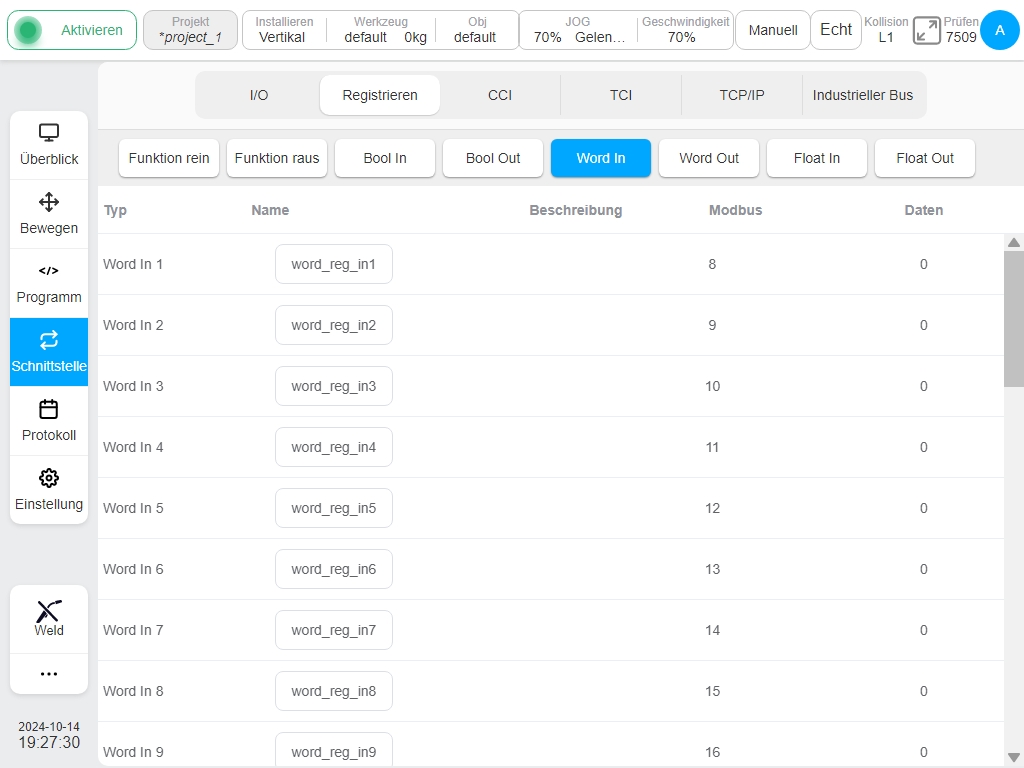
Die Register Wort-Eingangsschnittstelle und Float-Eingangsschnittstelle zeigen 32 Byte-Eingangsregister bzw. 32 Fließkomma-Eingangsregister mit Statusinformationen an. Sie können nur den Registernamen und die Wiederherstellung ändern, haben keine spezifische Funktion der Einstellung und können das Datenspalten-Datenanzeigefeld nicht bedienen.
Die Schnittstelle für die Ausgabe von Registerwörtern und die Schnittstelle für die Ausgabe von Fließkommadaten zeigt die Statusinformationen von 32 Byte-Ausgangsregistern bzw. 32 Fließkommadaten-Ausgangsregistern an. Ähnlich wie die Register-Bool-Ausgabeschnittstelle können sie den Registernamen ändern und ihn nach der Änderung wiederherstellen und können auch das Datenspalten-Datenanzeigefeld bedienen.
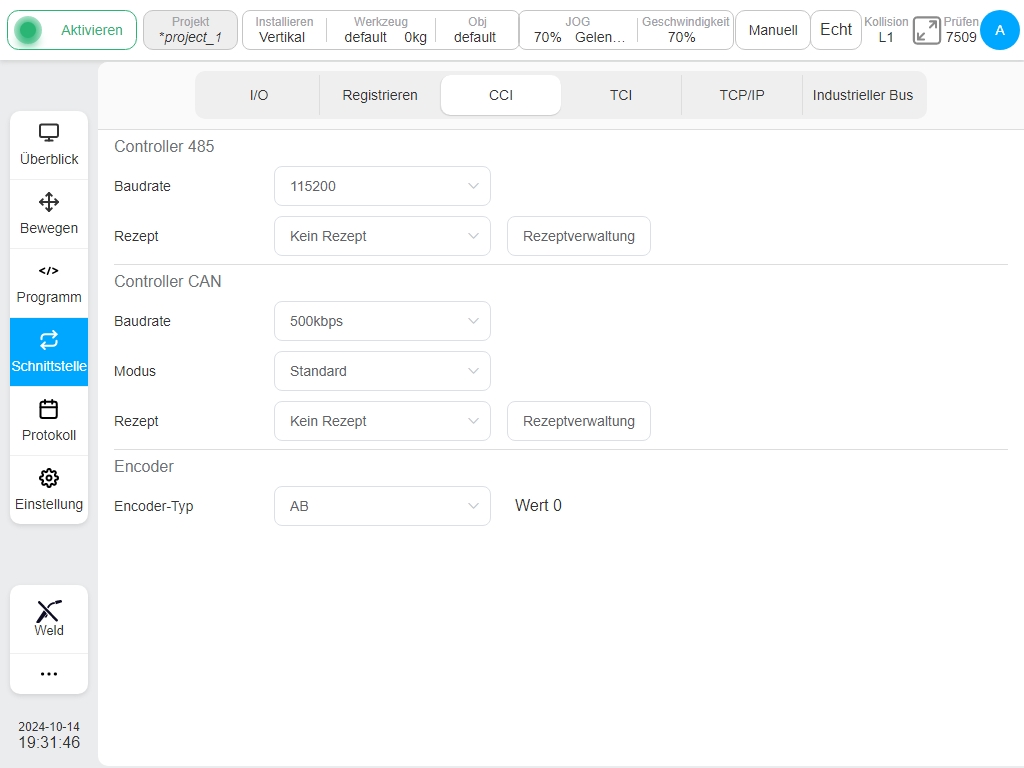
CCI#
Die Unterseite CCI dient zur Konfiguration des 485-Ports, des CAN-Ports und der Geberschnittstelle des Schaltschranks, hauptsächlich zur Einstellung der Baudrate und der Moduskonfiguration, der Formel und zur Einstellung des Gebertyps des 485-Ports und des CAN-Ports des Schaltschranks. Wie in der Abbildung gezeigt.
Die Baudrate für den Anschluss 485 des Schaltschranks kann aus der Dropdown-Liste Baudrate Selector ausgewählt werden. Port 485 unterstützt Baudraten von 9600, 19200, 38400, 57600 und 115200. Wählen Sie die Rezeptdatei für den Anschluss in der Dropdown-Liste für die Rezeptauswahl aus.
Wie in der obigen Abbildung zu sehen ist, zeigt das Dropdown-Feld den Namen der Rezeptdatei an, die vom Benutzer definiert wurde. Klicken Sie auf die Schaltfläche „Rezeptverwaltung“, und das Listenfeld für die Rezeptverwaltung wird angezeigt. Die Schnittstelle zeigt die vorhandenen Rezeptdateien im aktuellen Projekt an. Die Benutzer können Formeln hinzufügen, löschen und bearbeiten.
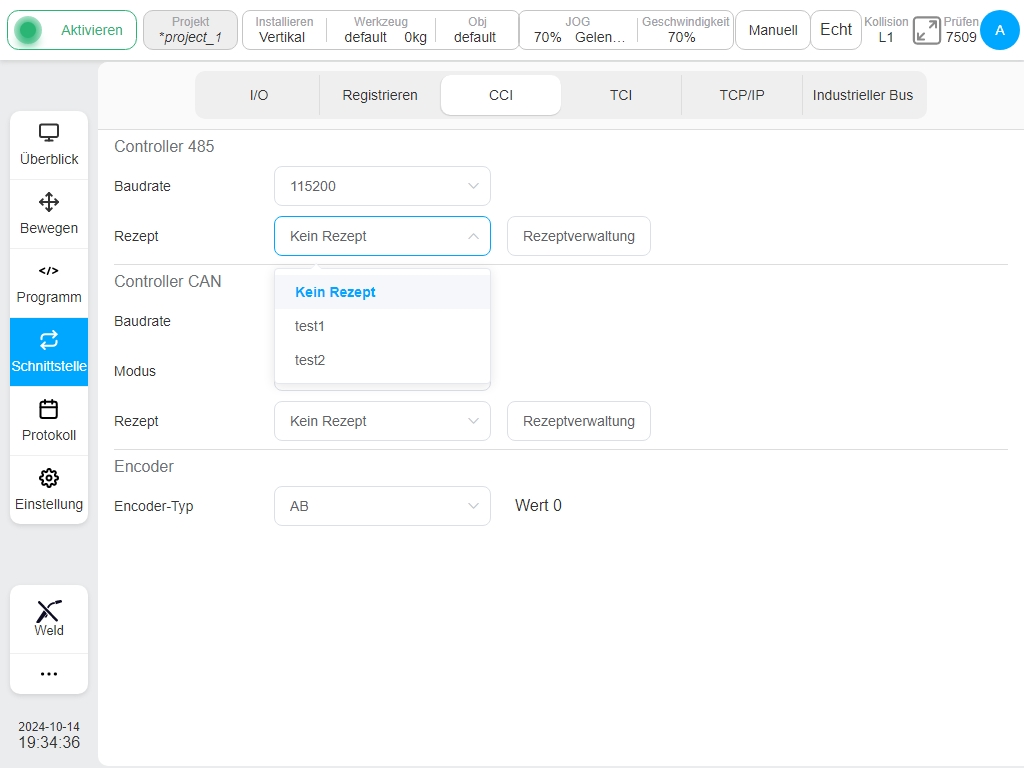
Klicken Sie auf eine beliebige Rezeptdatei in der Rezeptliste, und auf der rechten Seite wird ein Popup-Fenster mit den Schaltflächen „Bearbeiten“ und „Löschen“ angezeigt. Die Benutzer können die vorhandene Rezeptdatei ändern oder löschen.
Die Einstellungen der Baudrate und der Formel für den CAN-Anschluss des Schaltschranks sind ähnlich wie die des 485-Anschlusses und werden hier nicht behandelt. Die Baudraten der CAN-Anschlüsse sind 10kbps, 20kbps, 50kbps, 100kbps, 125kbps, 250kbps, 500kbps und 1000kbps. Es gibt zwei Modi der CAN-Konfiguration: Standard Frame und Extended Frame.
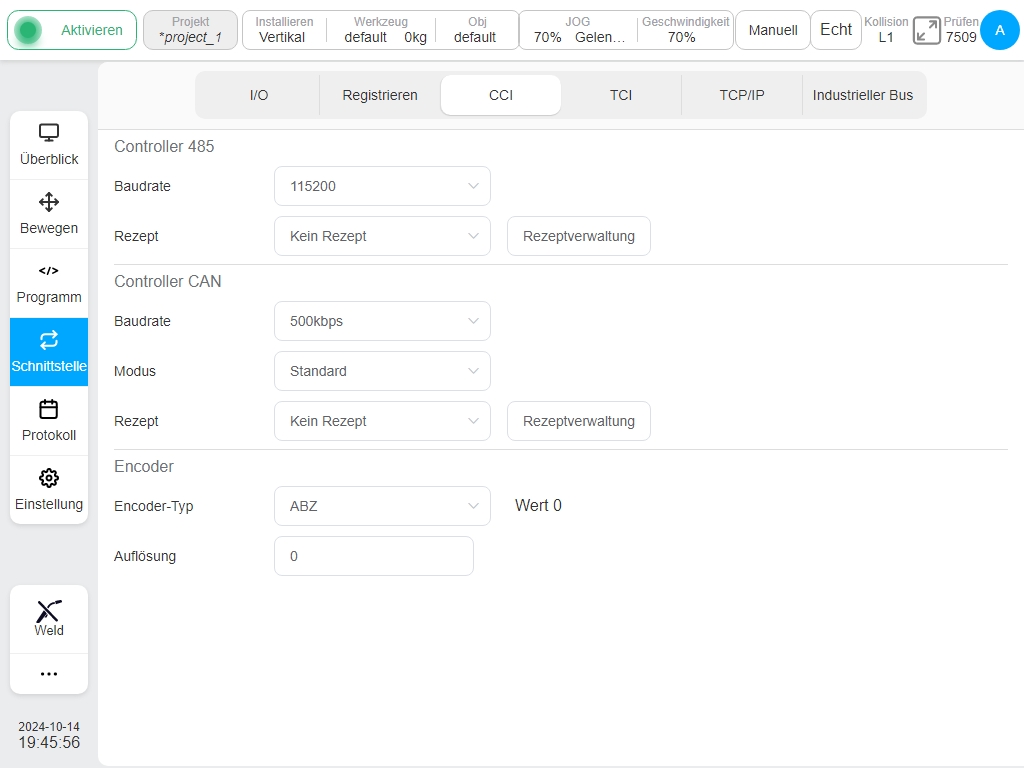
Es gibt zwei Arten von Schaltschrank-Geberkonfigurationen, nämlich AB und ABZ. Die Anzahl der vom aktuellen System erfassten Geberimpulse wird auf der rechten Seite des Gebers angezeigt. Wenn der Gebertyp auf ABZ eingestellt ist, muss der Benutzer auch die Anzahl der Geberlinien einstellen. Der Standardwert ist 0.
TCI#
Auf der TCI-Unterseite werden die E/A-Informationen der Endplatine und die Informationen zu den wiederverwendbaren Schnittstellen angezeigt. Die Endplatine verfügt über 2-Kanal-Werkzeugeingänge und 2-Kanal-Werkzeugausgänge, die mit den Mehrzweck-Eingangs-/Ausgangssignalen auf der Unterseite I/O identisch sind. Diese Schnittstelle ermöglicht es dem Benutzer, die Namen der Werkzeugeingänge und -ausgänge zu ändern und die Standardnamen nach der Änderung wiederherzustellen. Der Benutzer kann den Werkzeugausgangsmodus konfigurieren, und der 2-Kanal-Werkzeugausgangskonfigurationsmodus wird zwangsweise vereinheitlicht, d. h., wenn ein beliebiger Werkzeugausgangsmodus als PNP-Modus oder NPN-Modus konfiguriert wird, wird der andere Werkzeugausgangsmodus entsprechend geändert. Der Benutzer kann auch den Status des Werkzeugausgangs einstellen. 0 bedeutet Elektronik auf niedrigem Niveau und 1 bedeutet Elektronik auf hohem Niveau, wie in der Abbildung gezeigt.
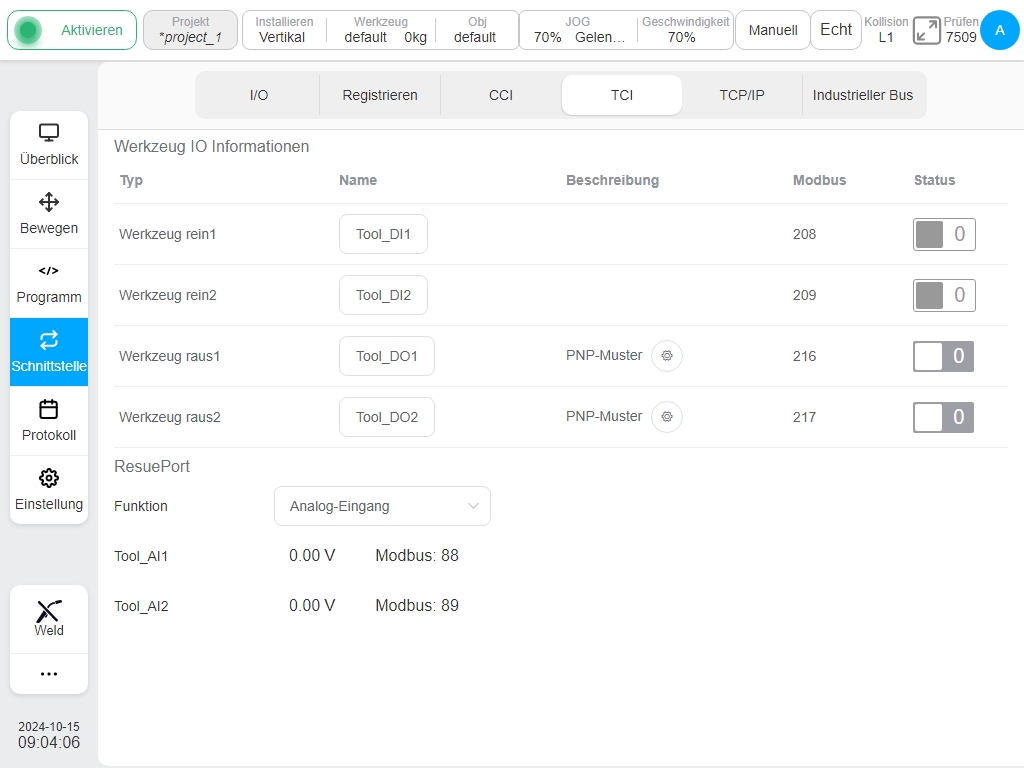
Vor der Verwendung kann der Benutzer die Endschnittstellenfunktion als Analogeingang oder 485-Schnittstelle konfigurieren und das entsprechende Signal entsprechend der Konfiguration erhalten. Wie in der obigen Abbildung gezeigt, zeigt die Schnittstelle, wenn die Endschnittstellenfunktion auf Analogeingang eingestellt ist, die Daten der beiden analogen Spannungseingänge und die entsprechenden Modbus-Adressen in Echtzeit an. Wenn die Endschnittstelle auf 485 eingestellt ist, zeigt die Schnittstelle die Baudrate und die Formelkonfigurationsinformationen an, wie in der folgenden Abbildung dargestellt.
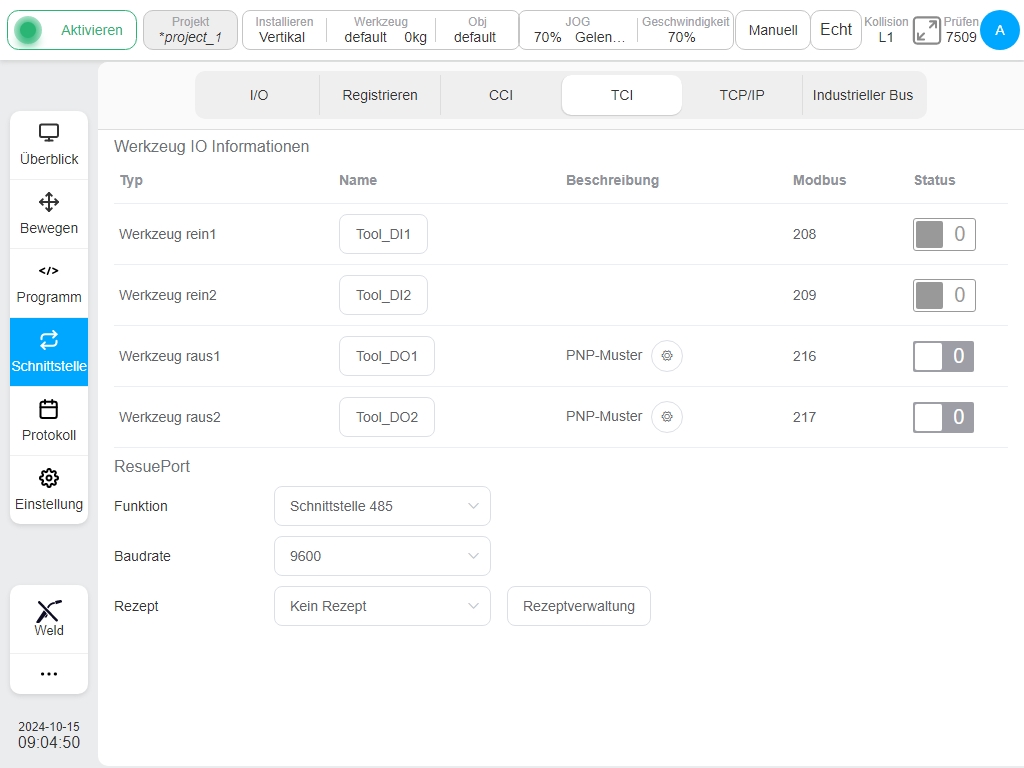
Die Baudrate und die Formel können am Ende der 485-Schnittstelle eingestellt werden. Die spezifische Bedienung ist ähnlich wie bei der Einstellung der 485-Schnittstelle des Schaltschranks auf der Unterseite CCI, die hier nicht behandelt wird.
TCP/IP#
Auf der Unterseite TCP/IP werden hauptsächlich die externen TCP/IP-Verbindungsinformationen des Roboters angezeigt. Sie enthält hauptsächlich drei Unterregisterkarten: Standardnetzwerk, Benutzerdefinierter Server und Benutzerdefinierter Client.
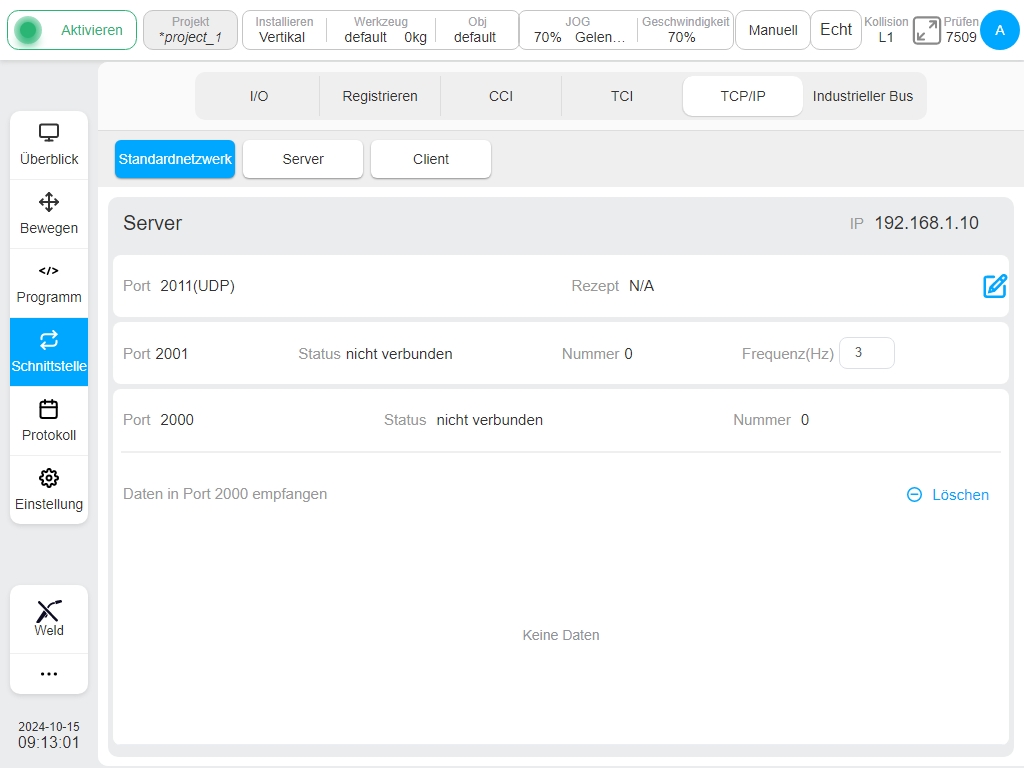
Auf der Unterregisterkarte Standardnetzwerk werden Informationen zu den Ports 2000, 2001 und 2011 als Server angezeigt. Zeigt den Verbindungsstatus und die Anzahl der Verbindungen für die System-IP, die Ports 2000 und 2001 an.
Bemerkung
Die auf dem Server angezeigte IP-Adresse entspricht der IP-Adresse des Netzwerkanschlusses LAN1. Die Einstellungen für die Adresse von LAN1 finden Sie unter „Netzwerkeinstellungen“.
Port 2000 kann die Steuerbefehle des Roboters empfangen. Die von Port 2000 empfangenen Informationen werden im unteren Teil der Seite angezeigt.
Standardmäßig sendet der Anschluss 2001 die aktuellen Statusinformationen des Roboters mit einer Frequenz von 10 Hz. Die Frequenz kann eingestellt werden, der Bereich liegt zwischen 1 Hz und 100 Hz.
Der Port 2011 ist ein UDP-Port, über den Sie den Roboter über die im Rezept konfigurierten Datenelemente steuern können.
Einzelheiten zur Verwendung der Ports 2000 und 2001 finden Sie in der Beschreibung der externen Kommunikationsschnittstellen für kollaborative Roboter.
Einzelheiten zur Verwendung des Portweins 2011 finden Sie in der Rezeptanleitung.
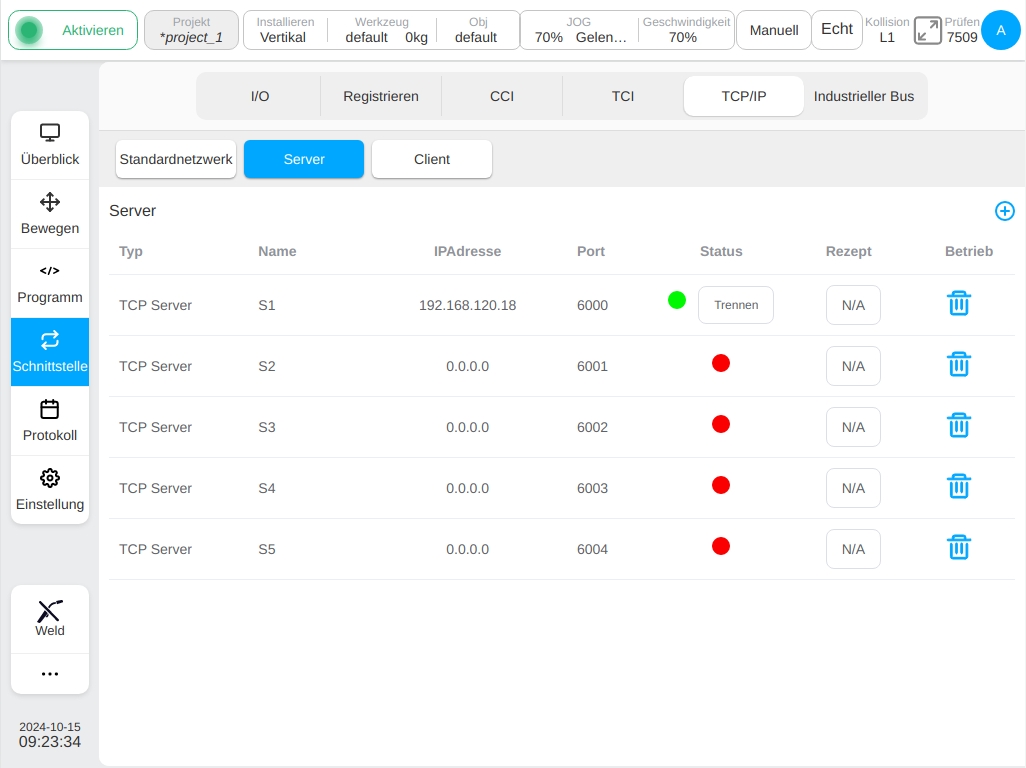
Auf der Unterregisterkarte „Benutzerdefinierter Server“ wird die Liste der vom Benutzer erstellten Socket-Server angezeigt, einschließlich des benutzerdefinierten Servertyps, des Namens, der IP-Adresse des verbundenen Clients, des Ports, des Verbindungsstatus, des Rezepts und des Betriebssymbols.
Wenn der Verbindungsstatus grün leuchtet, können Sie auf die Schaltfläche „Trennen“ auf der rechten Seite der Statusanzeige klicken, um die Verbindung zu trennen.
Klicken Sie auf die Schaltfläche „Rezept“, um das Rezept festzulegen, und klicken Sie auf das Symbol in der Aktionsspalte  , um den hinzugefügten benutzerdefinierten Server zu löschen.
Klicken Sie auf das Symbol
, um den hinzugefügten benutzerdefinierten Server zu löschen.
Klicken Sie auf das Symbol  oben rechts auf der Seite, um ein Pop-up-Fenster zum Hinzufügen einer Verbindung zu öffnen, geben Sie den Namen und die Portnummer ein, und klicken Sie auf die Schaltfläche „OK“, um einen benutzerdefinierten Server hinzuzufügen.
oben rechts auf der Seite, um ein Pop-up-Fenster zum Hinzufügen einer Verbindung zu öffnen, geben Sie den Namen und die Portnummer ein, und klicken Sie auf die Schaltfläche „OK“, um einen benutzerdefinierten Server hinzuzufügen.
Auf der Unterregisterkarte Benutzerdefinierter Client werden alle Verbindungsinformationen des Roboters als Client angezeigt, einschließlich des Typs des benutzerdefinierten Clients (TCP/UDP), des Namens, der IP-Adresse, des Ports, des Rezepts und des Betriebssymbols.
Klicken Sie auf die Schaltfläche Rezept, um das Rezept festzulegen, und klicken Sie auf das Symbol in der Aktionsspalte , um den hinzugefügten benutzerdefinierten Client zu löschen.
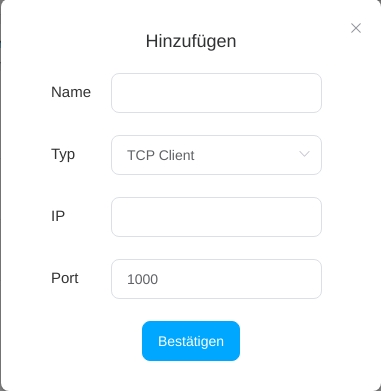
Die Verbindung kann im Programm mit Hilfe eines Skripts oder durch Klicken auf das Symbol oben rechts auf der Seite aufgebaut werden.
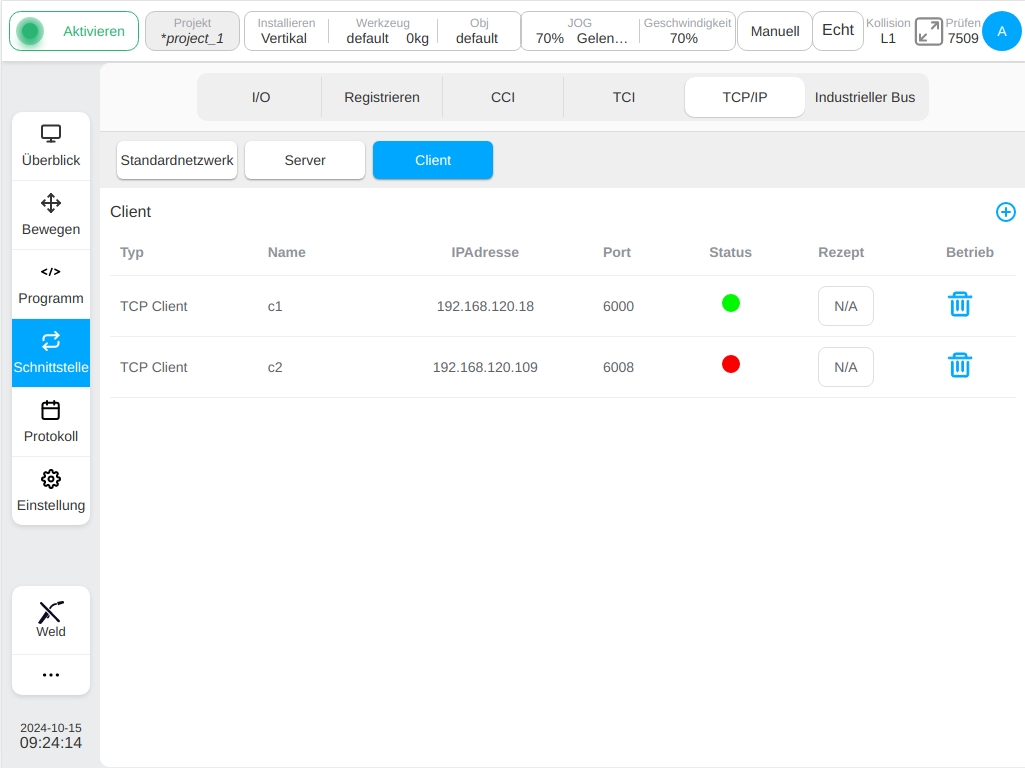
Klicken Sie auf das Symbol , um das folgende Dialogfeld zu öffnen. Geben Sie die Verbindungsinformationen ein und klicken Sie auf die Schaltfläche „OK“, um eine Verbindung herzustellen.
Industrie-Bus#
Die Unterseite Industriebus enthält im Wesentlichen vier Unterregisterkarten: Modbus TCP, Modbus RTU, Profinet, Ethernet/IP.
Mit der Modbus-TCP-Funktion kann das Robotersystem als Modbus-Server arbeiten, um den Befehl von einem externen Modbus-Client-Gerät zu hören und den Verbindungsstatus zu überwachen, wenn sich der Roboter im Einschaltzustand befindet. Der Wert des Ziel-Modbus-Adressregisters wird auf der Grundlage des Befehls r/w vom Modbus-Client gesteuert. Wie in der folgenden Abbildung gezeigt, werden die Informationen über die Modbus TCP-Verbindung und den möglichen Betrieb angezeigt:
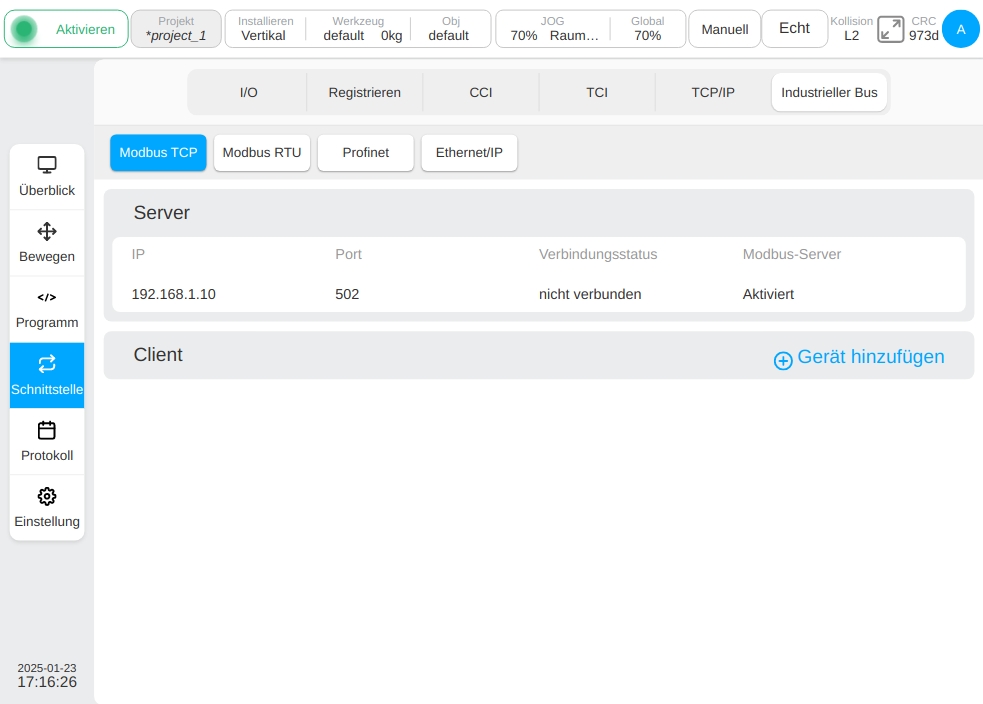
Mit der Modbus-TCP-Funktion kann das Robotersystem als Modbus-Client arbeiten, um eine Verbindung zum externen Modbus-Servergerät herzustellen. Es ist in der Lage, das Ziel-Modbus-Adressregister zu betreiben.
Die System-IP-Adresse, die Portnummer und der Verbindungsstatus des Modbus-Servers werden im oberen Teil der Schnittstelle angezeigt. Klicken Sie auf Gerät hinzufügen. Die virtuelle gemeinsame Tastatur wird angezeigt. Geben Sie die IP-Adresse des externen Modbus-Client-Geräts ein, z. B. 192.168.218.163. Die IP-Adresse des Modbus-Geräts und die zugehörigen ICONS werden auf der Schnittstelle angezeigt.
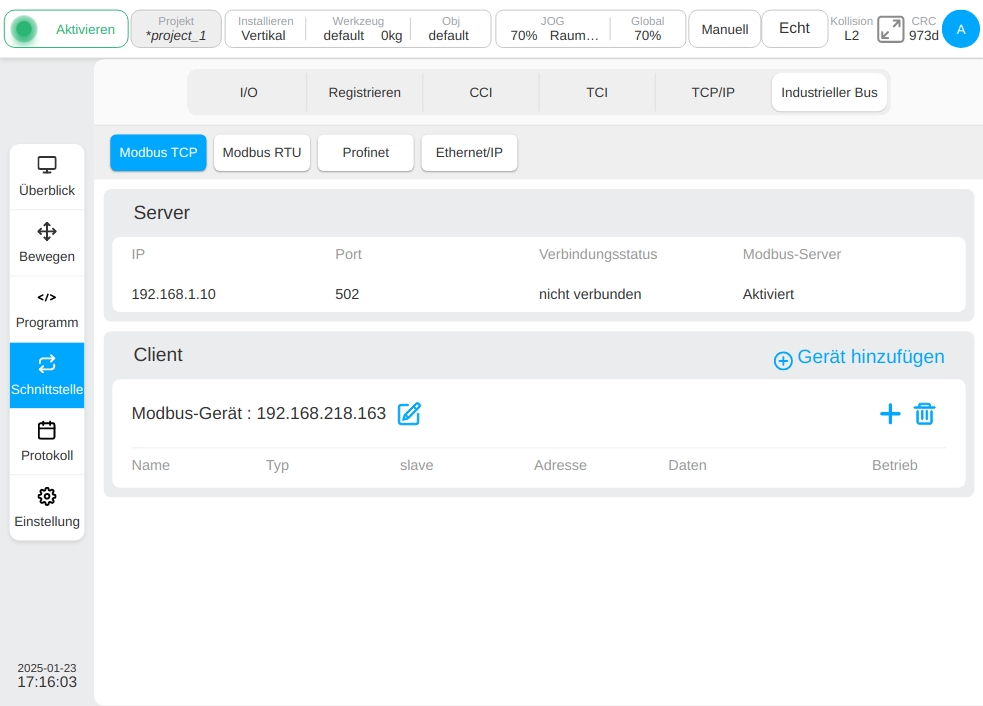
Klicken Sie auf das Symbol  das Fenster Neuer Modbus-Knoten wird angezeigt, wie in der Abbildung dargestellt. Geben Sie den Knotennamen, den Knotentyp, die Slavenummer, die Offsetadresse und die Länge ein,
und klicken Sie zur Bestätigung auf die Schaltfläche „OK“. Es gibt vier Knotentypen: Nur-Lese-Spule(1x), Lese-Schreib-Spule(0x), Nur-Lese-Register(3x) und Lese-Schreib-Register(4x).
das Fenster Neuer Modbus-Knoten wird angezeigt, wie in der Abbildung dargestellt. Geben Sie den Knotennamen, den Knotentyp, die Slavenummer, die Offsetadresse und die Länge ein,
und klicken Sie zur Bestätigung auf die Schaltfläche „OK“. Es gibt vier Knotentypen: Nur-Lese-Spule(1x), Lese-Schreib-Spule(0x), Nur-Lese-Register(3x) und Lese-Schreib-Register(4x).
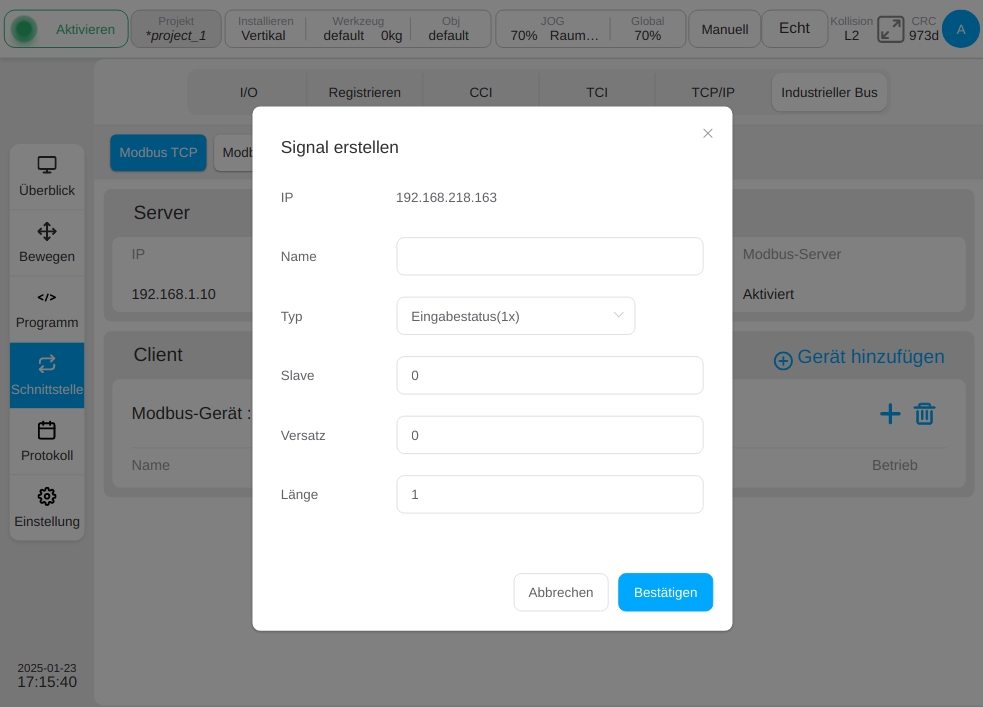
Bei der Erstellung eines Knotens ist die Länge standardmäßig 1. Wenn der Längenwert 1 ist, wird ein einzelner Knoten erstellt. Ist die Länge größer als 1, werden mehrere Knoten in Stapeln erstellt. Wenn die Länge auf 3 eingestellt ist, fügen Sie Unterstriche (_) zu den Knotennamen entsprechend der Länge hinzu, d. h. node_1, node _2 und node _3, und die Adressen sind nacheinander 0, 1 und 2, wie in der Abbildung gezeigt.
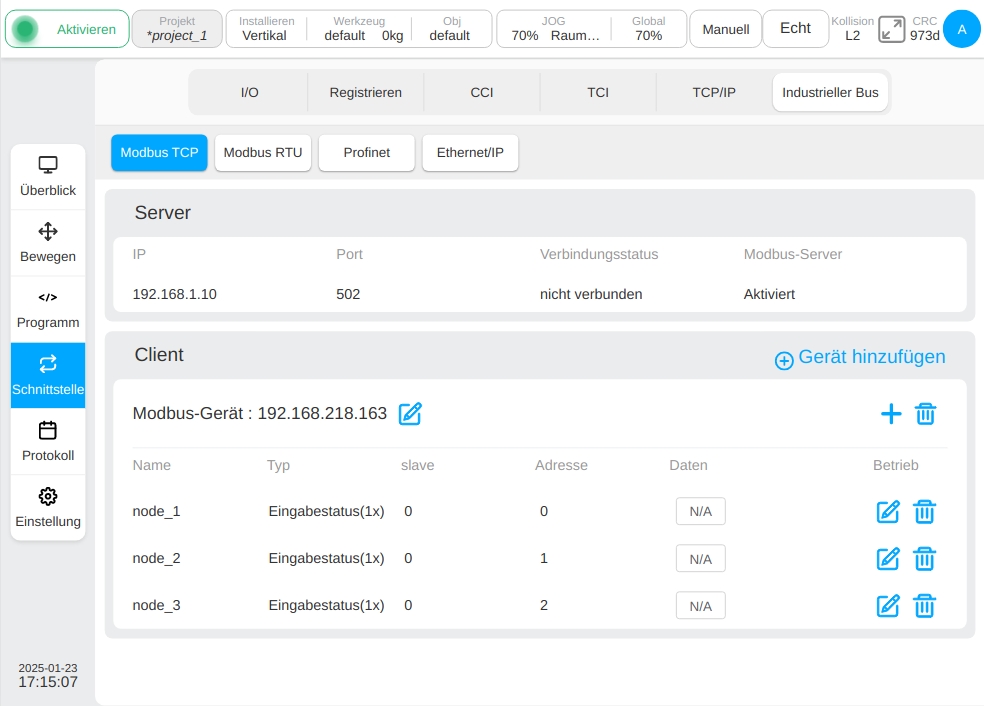
Nach der Erstellung eines neuen Knotens werden die Informationen über den neu definierten Knoten auf der Schnittstelle angezeigt. Wenn in der Datenspalte keine Daten angezeigt werden, wird N/A angezeigt.
Der Benutzer kann jeden Knoten ändern oder löschen. Klicken Sie auf die Schaltfläche  der entsprechenden Knotenzeile, und das Popup-Fenster ist ähnlich wie bei der Erstellung eines neuen Knotens,
Mit dem Unterschied, dass der Knotenname nicht geändert werden kann, die Länge nicht angezeigt wird und der Knotentyp, die Slave-Nummer und die Offset-Adresse geändert werden können.
der entsprechenden Knotenzeile, und das Popup-Fenster ist ähnlich wie bei der Erstellung eines neuen Knotens,
Mit dem Unterschied, dass der Knotenname nicht geändert werden kann, die Länge nicht angezeigt wird und der Knotentyp, die Slave-Nummer und die Offset-Adresse geändert werden können.
Der Benutzer kann die IP-Adresse des neu erstellten Modbus-Geräts ändern. Klicken Sie auf das Symbol hinter der IP-Adresse des Modbus-Geräts, die virtuelle gemeinsame Tastatur wird eingeblendet,
Geben Sie die Ziel-IP-Adresse ein, z. B.: 192.168.218.168. Nachdem Sie auf die Schaltfläche „OK“ geklickt haben, wird die Schnittstelle wie folgt angezeigt.
Nachdem die IP-Adresse eines Modbus-Geräts geändert wurde, sind die Knoteninformationen der neuen IP-Adresse die gleichen wie vor der Änderung der IP-Adresse.

Unter Verwendung der Modbus-RTU-Funktion kann das Robotersystem über die Schnittstelle des Controllers 485 und die Schnittstelle des Roboterwerkzeugs 485 als Modbus-Slave arbeiten, wenn sich der Roboter im Einschaltstatus befindet. Das externe Modbus-Master-Divice kann Register über die Modbus-Zieladresse lesen und schreiben.
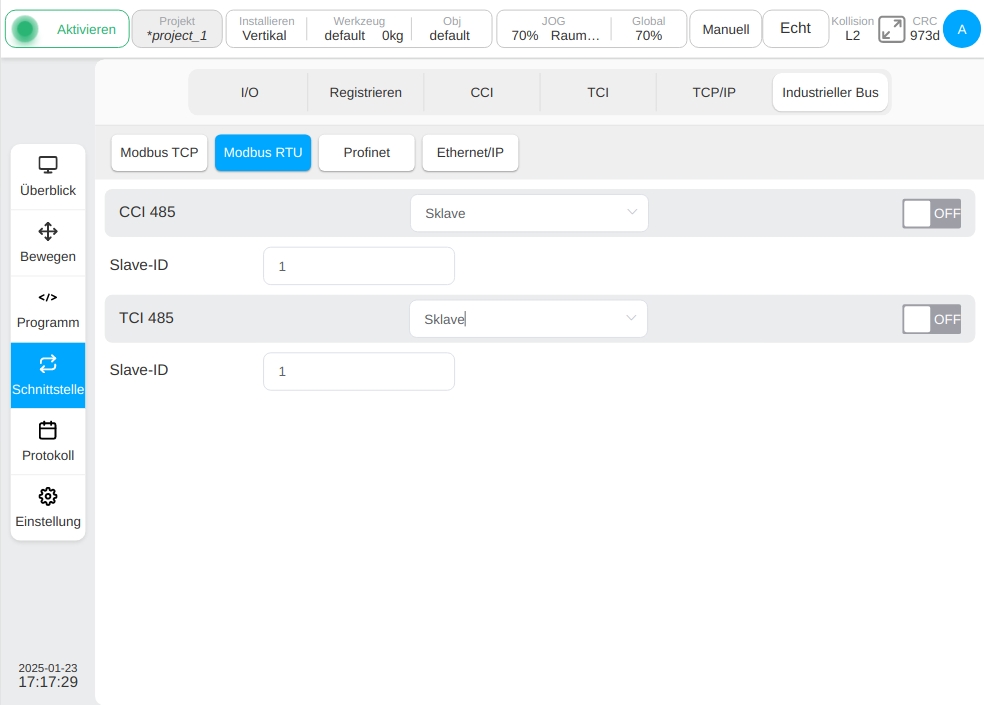
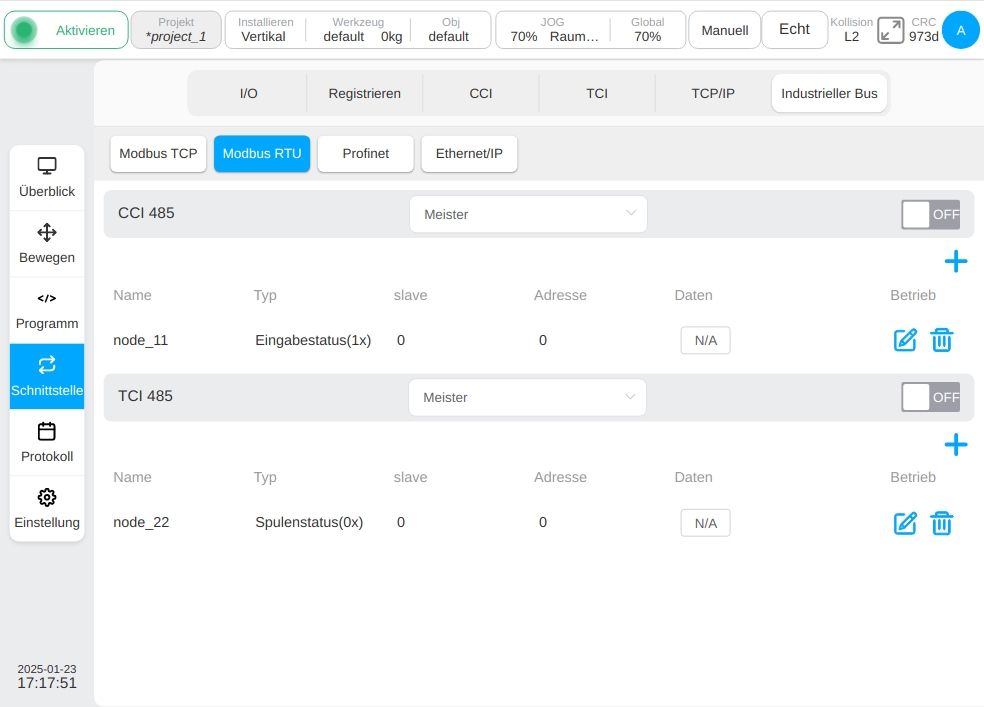
Unter Verwendung der Modbus-RTU-Funktion kann das Robotersystem als Modbus-Master über die Controller-485-Schnittstelle oder die Roboterwerkzeug-485-Schnittstelle arbeiten und eine Verbindung zu externen Modbus-Slave-Geräten herstellen, wenn sich der Roboter im Einschaltzustand befindet. Es ist in der Lage, das Register des Modbus Slave über die Modbus-Adresse zu lesen und zu schreiben. Alle damit verbundenen Vorgänge wie Hinzufügen, Löschen, Bearbeiten usw. zu den Modbus-Knoten sind vollständig identisch mit denen für die Modbus-TCP-Funktion.
Bemerkung
Nachdem die Schnittstelle des Controllers 485 oder des Roboterwerkzeugs 485 mit dem Modbus-Modus konfiguriert und aktiviert wurde, ist sie nicht in der Lage, die entsprechende 485-Schnittstelle direkt über die zugehörigen Skripte und Funktionen zu betreiben. Es ist nur möglich, den Lese- und Schreibvorgang zum Modbus-Register über die Ziel-Modbus-Adresse unter Verwendung von Modbus-bezogenen Skripten und Funktionen durchzuführen.
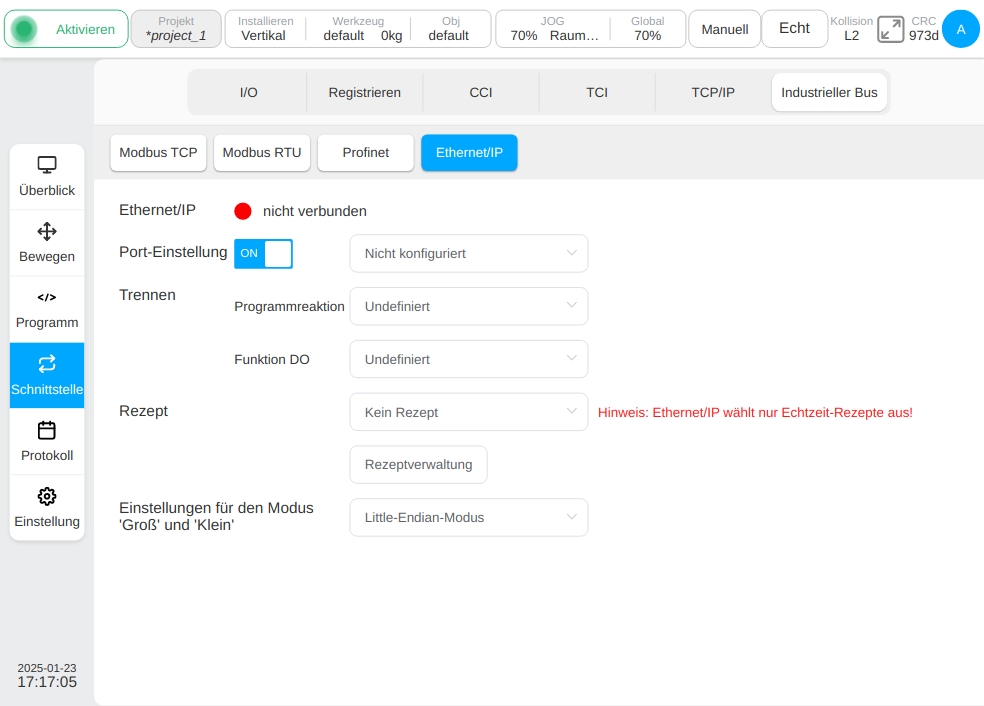
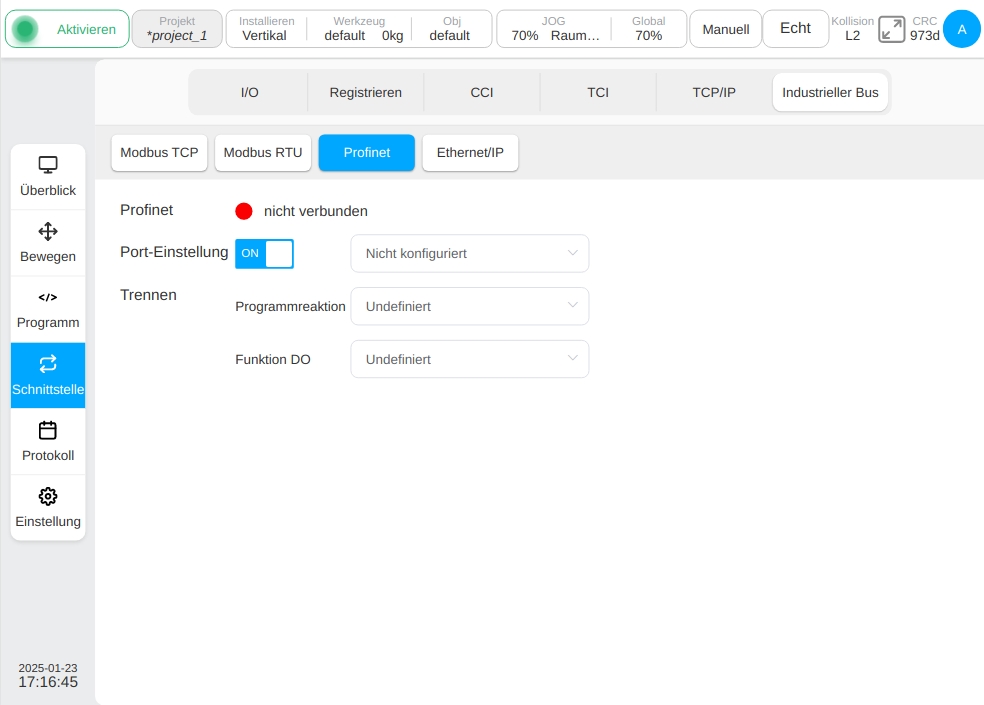
Die Unterregisterkarten Profinet und Ethernet/IP dienen hauptsächlich zur Anzeige des Verbindungsstatus, der Port-Einstellungen und der Konfiguration der Trennungsbearbeitung, einschließlich der Programmreaktion und der entsprechenden Konfiguration des Funktionsausgangs IO. Zu den Anschlusseinstellungen gehört, ob der entsprechende Anschlussname aktiviert und konfiguriert werden soll. Die Auswahlmöglichkeiten für die Programmreaktion sind: undefiniert, angehaltenes Programm, Programm stoppen; Die Dropdown-Optionen für die Funktion DO-Ausgang umfassen: undefinierte und undefinierte Ausgangssignalnamen in der Funktion Ausgangssignal auf der Unterseite E/A. Die DO-Funktion, die für Profinet und Ethernet/IP-Trennung auf jeder Unterseite konfiguriert ist, wird mit der Konfiguration des Funktionsausgangs auf der E/A-Unterseite synchronisiert.
Darüber hinaus kann die Unterregisterkarte Ethernet/IP auch für die Rezeptkonfiguration und -verwaltung sowie für die Einstellungen des Big- und Small-Modus verwendet werden.
Hinweis: Ethernet/IP erlaubt nur die Auswahl von Echtzeitrezepten!