


Backstage Parameters#
Click the “Background Parameters” tab to enter the Background Parameters sub-page, where you can set the offset of the palletized coordinate system and the parameters related to the suction cups and lifting columns.
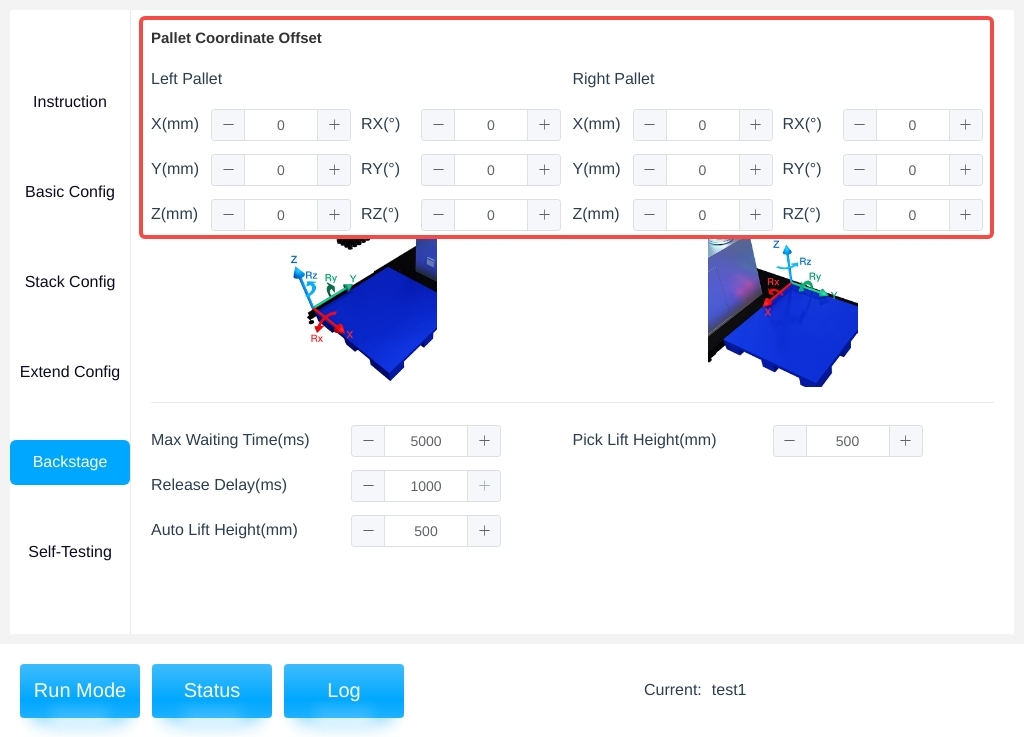
Configuration of the palletizing coordinate system#
The offset of the pallet coordinate system can be set in the background parameter sub-page, which can be used to deal with the problem of inaccurate placement of boxes at the end of the robot if the ground on which the pallet is placed is not flat enough, as shown in the figure below.
Configuration of suction cup and lifting column parameters#
You can set the parameters related to suction cups and lifting columns under the background parameter subpage, as shown in the following figure.
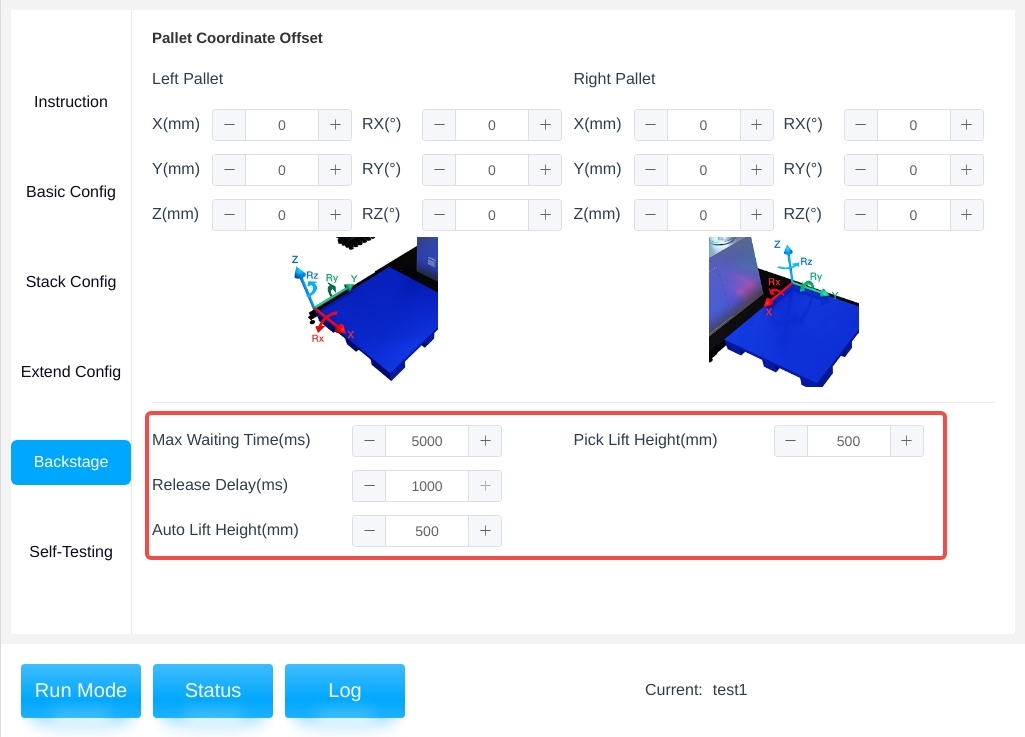
Maximum Vacuum Waiting Time: In ms, this parameter is the maximum time the robot end needs the suction cups to generate enough vacuum during the process of sucking up the box.If sufficient vacuum is not generated within the specified time, a fault will be reported. The maximum vacuum waiting time can be decided according to the actual situation.
Vacuum release delay: Unit ms, after the robot reaches the discharge point and turns off the vacuum signal, it delays for a certain period of time, i.e. the set value of the vacuum release delay parameter.Ensure that the suction cup is completely detached from the box before the movement of the robot, so as to avoid the box is not completely detached from the suction cup to produce collision.
Automatic lifting height: Unit mm, according to the actual situation by setting this parameter, to make the box body yard position higher than the height can be automatically lifted;
Feeding lifting height: unit mm, the purpose of setting the feeding lifting height is to avoid the interference of the baffle plate in the process of feeding at the end of the robot by adjusting the feeding lifting height.Click directly on the number to activate the numeric keypad for input, or select “+” and “-” to adjust the lifting height of the robot end to pick up materials.