Safety Maintenance#
Manual Release Brake#
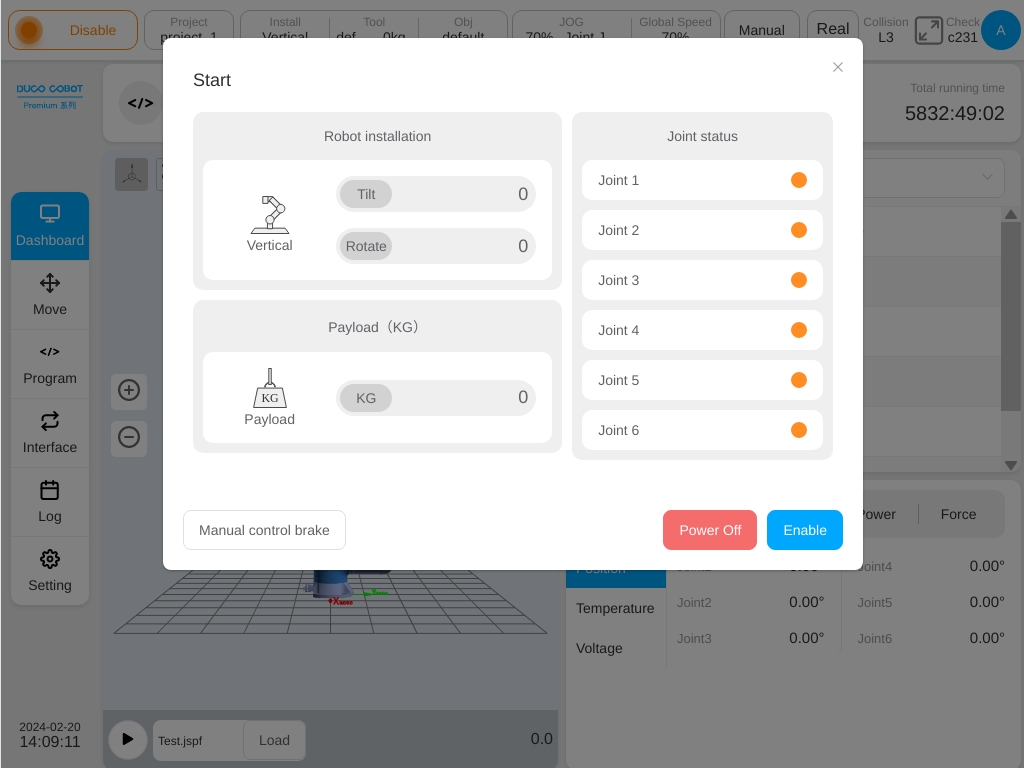
In some cases, the user will need to manually release the brake on a single joint. When robot is powered on but not enabled, the entrance to manually release the brake will appear on the startup page that is shown as in the figure.
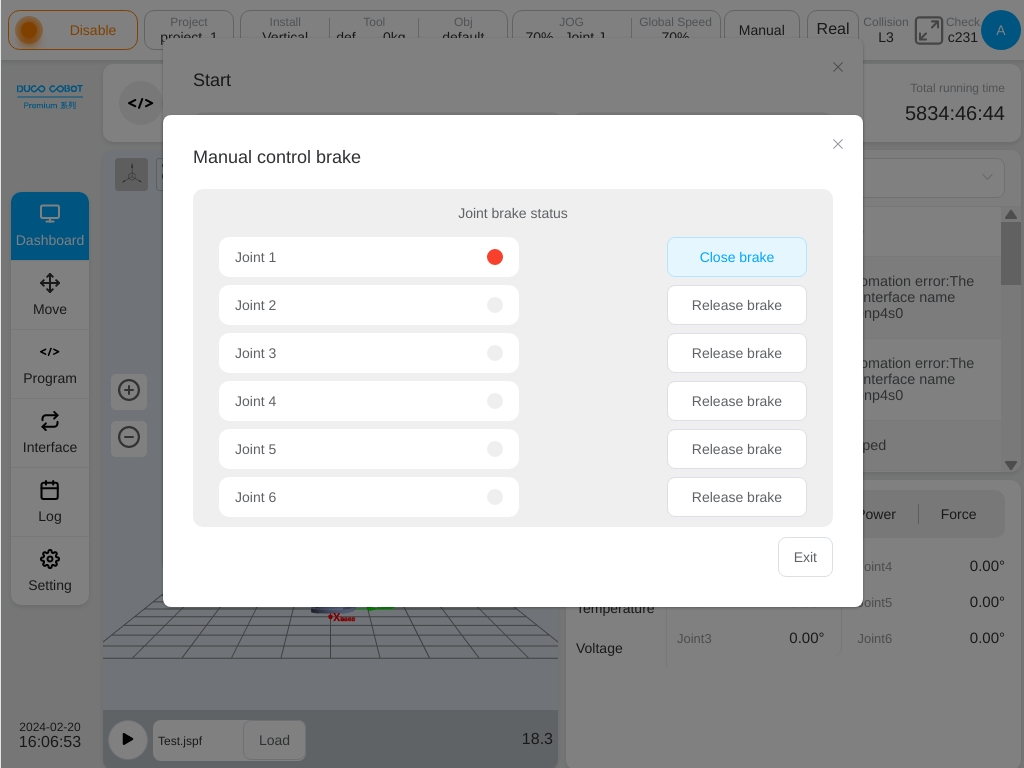
Click to enter the manual release brake page as shown in the figure. The left side of the page shows the brake status of each joint where the gray color presents the brake is closed, red color presents the brake is released. On the right side is the ‘Brake Control’ button, clicking to control the opening and closing of the brake.
Brake Test#
Users need to carry out brake test on schedule to prevent the risk caused by brake failure from robot. The system will periodically remind user to carry out brake test with the default reminder period is every 30 days.
When the set time has elapsed since the last brake test, the following dialog box will pop up, prompting the user to perform the brake test. The brake test entrance on the startup page will be displayed with a small red dot as to remind the user.
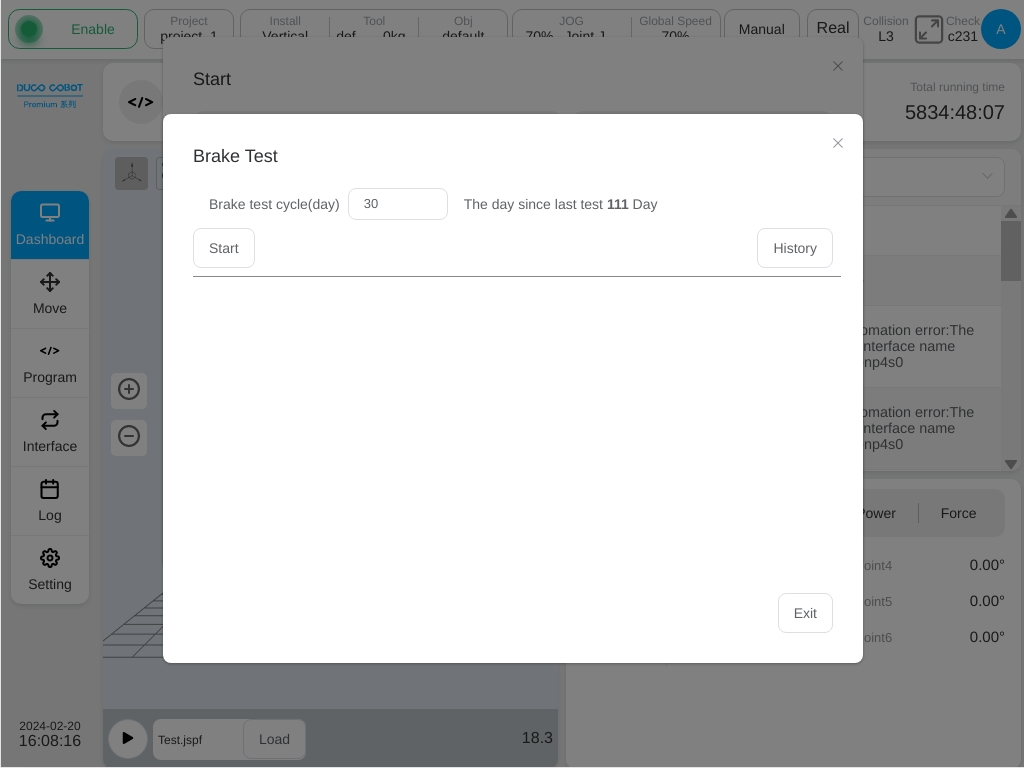
When robot is enabled, an entrance to the brake test function will appear on the start page. Click the button to enter the brake test page that is shown in the figure. This page displays the brake test period and the number of days since the last brake test.
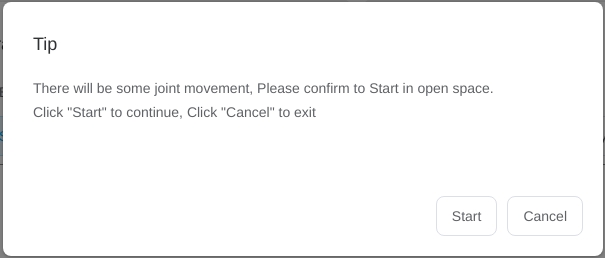
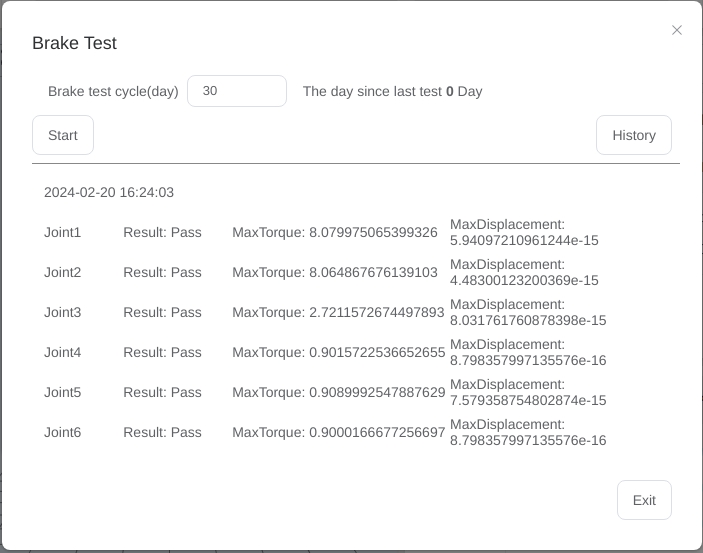
By clicking ‘Start Detection’ button the following dialog box will pop up then follows the prompts to perform operations. In the process of detection, it is able to pause and stop the detection process at any time. After the test is completed, the result of the brake test is displayed.
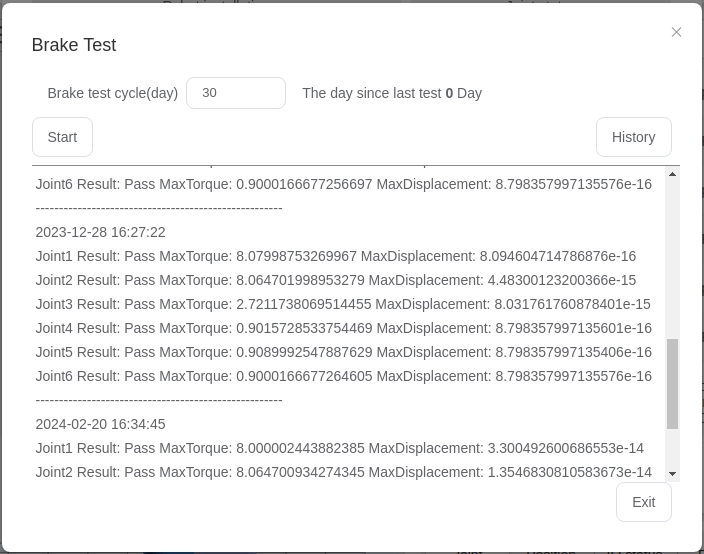
Click the ‘Historical Data’ button to view the time and test results of previous brake tests.
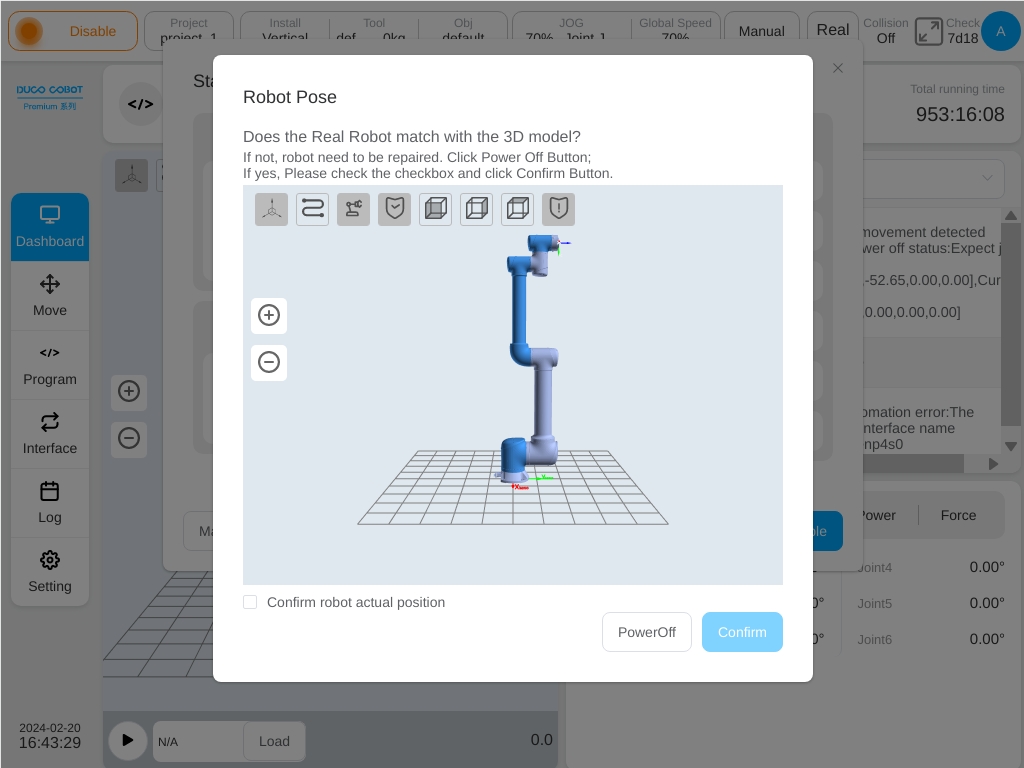
Power-on Joint Position Verification#
When robot is powered on, it will detect whether the joint has been significantly rotated in the power off state to ensure the safety of use.
If the joint has been significantly rotated, the following dialog box will pop up. The user confirms whether the pose of the real robot is consistent with the 3D model on the interface. If yes, click ‘Confirm that the posture of the robot shown above is consistent with the actual one’ and then click the ‘Confirm’ button to continue the power-on operation. If not, click the ‘Power off’ button to disconnect the power supply of robot and contact the maintenance personnel.