Ajustes de seguridad#
Esta sección describe cómo ver las configuraciones de seguridad y cambiar las configuraciones de seguridad de la aplicación. Actualmente existen dos tipos de controladores de seguridad, DucoSafetyV1.0 para armarios de control DC30. DucoSafetyV2.0 se ADAPTA a los armarios de control DC00 / DC15S/ DC30D.
DucoSeguridad V1.0#
Ver configuraciones de seguridad#
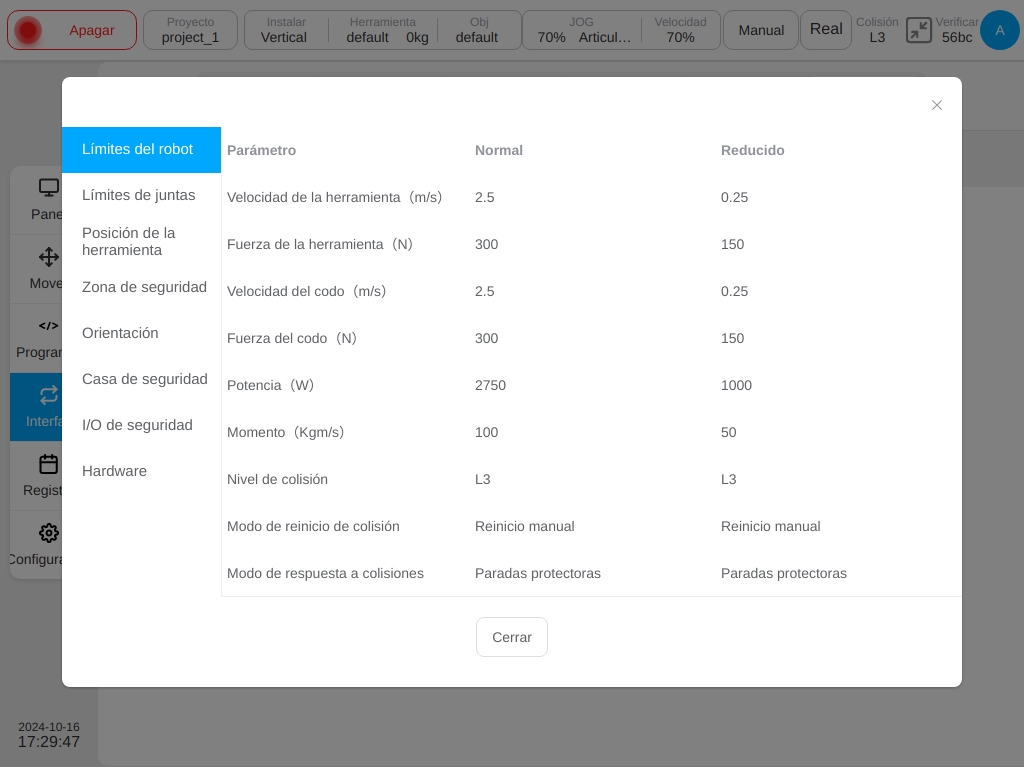
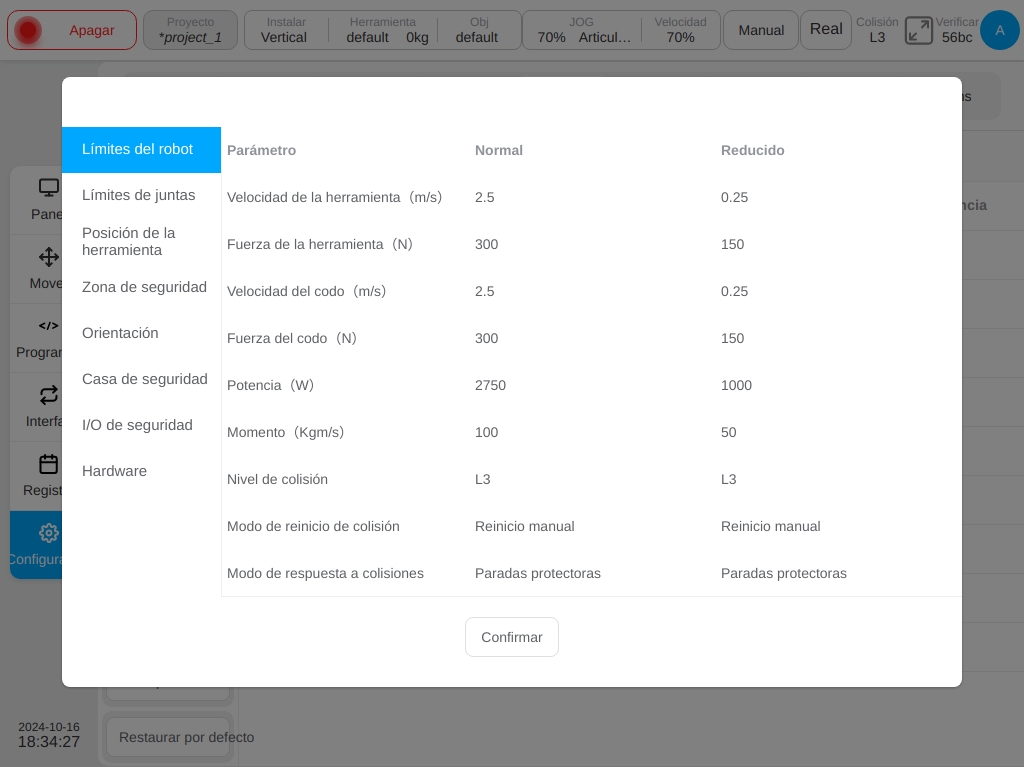
Haga clic en el botón «Verificación de seguridad» de la barra de estado. Aparece el siguiente cuadro de diálogo para ver los parámetros de configuración de seguridad activados actualmente.
El usuario también puede ver los parámetros de configuración de seguridad en la página de configuración de seguridad.
Solicitud de cambio de configuración de seguridad#
Debe utilizar la contraseña para desbloquear la cuenta antes de cambiar la configuración de seguridad. Entre en la página de configuración – configuración de seguridad, haga clic en el botón «Desbloquear» en la parte inferior izquierda para desbloquear el robot sólo cuando esté apagado. Introduciendo la contraseña (contraseña de inicio de sesión del usuario actual) se accede al modo de configuración de parámetros de seguridad una vez superada la verificación. El área de estado de la barra de estado se muestra como Configuración de parámetros de seguridad.
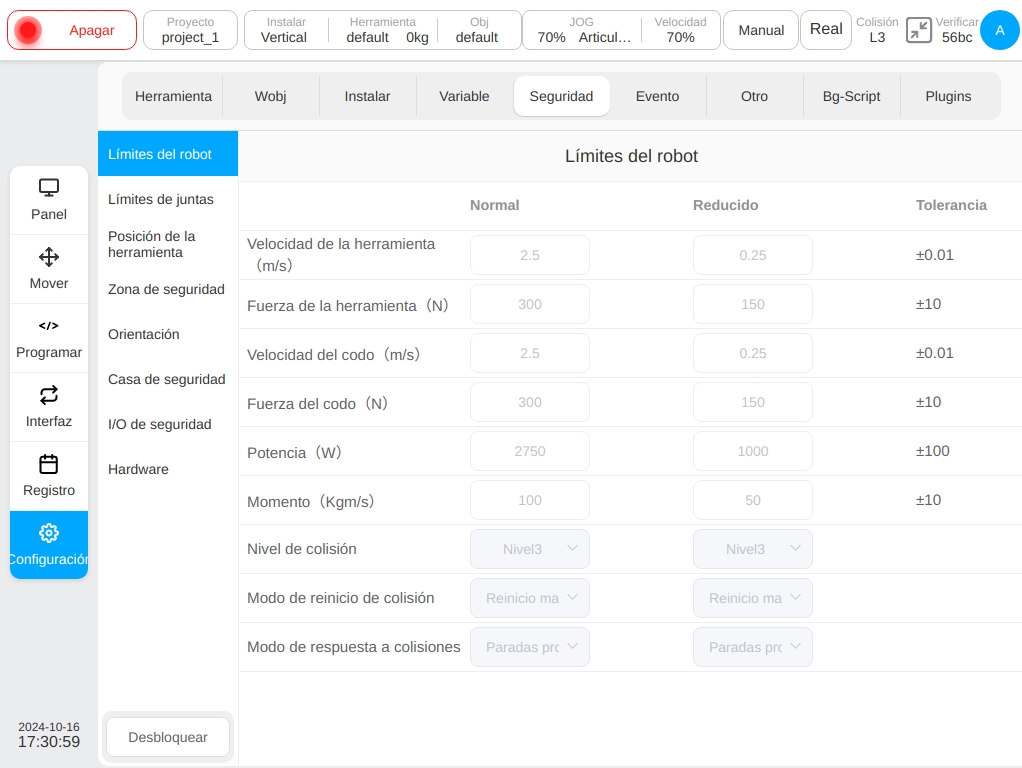
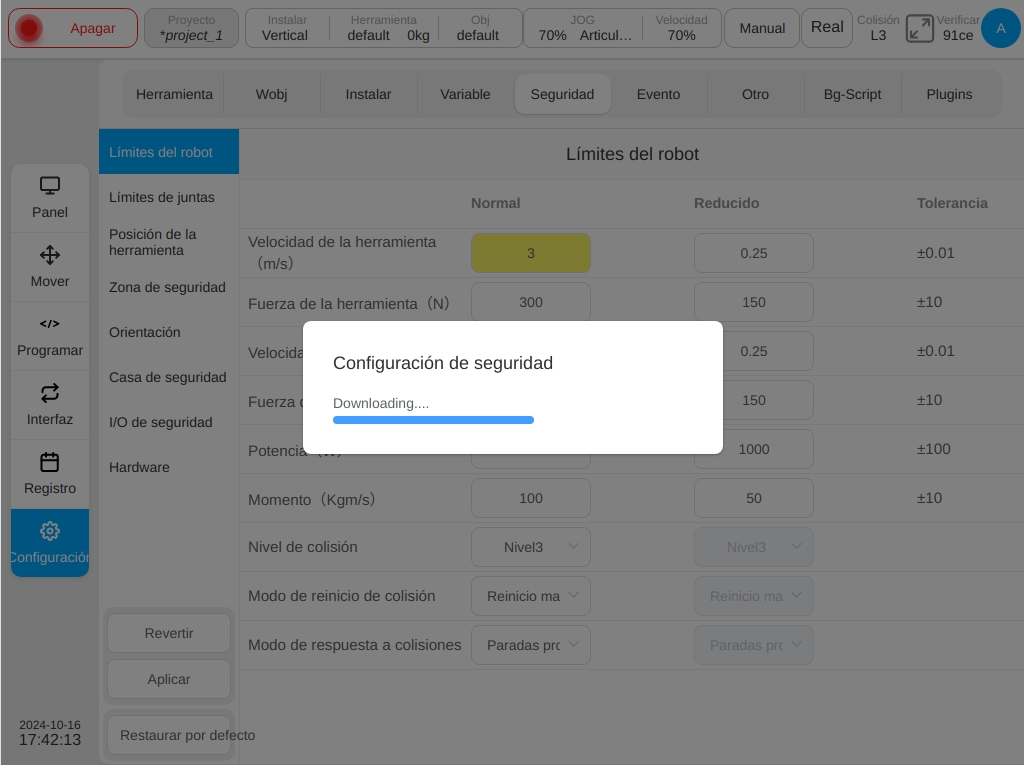
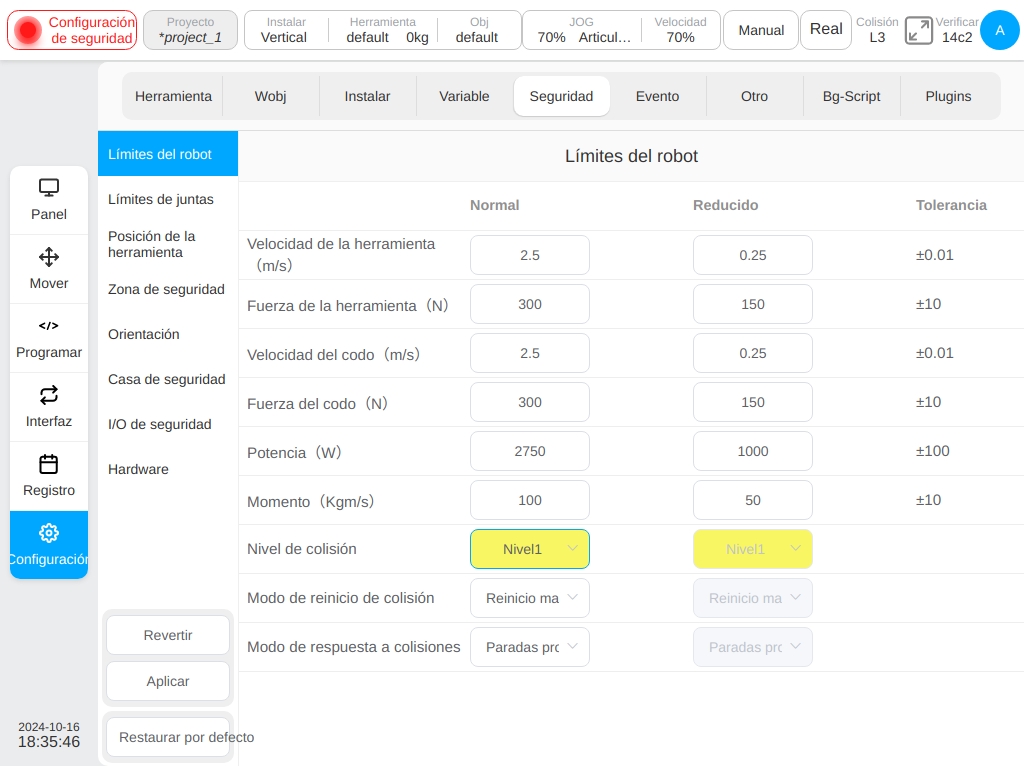
Cuando cambie la configuración, la modificación se resaltará en amarillo. Todos los cambios realizados sólo surtirán efecto cuando se haga clic en el botón “Aplicar configuración”. Haciendo clic en el botón «Restaurar configuración por defecto» se restauran todos los parámetros de seguridad a la configuración por defecto. Tras pulsar el botón «Aplicar configuración», aparecerá un cuadro de diálogo como el que se muestra en la imagen.
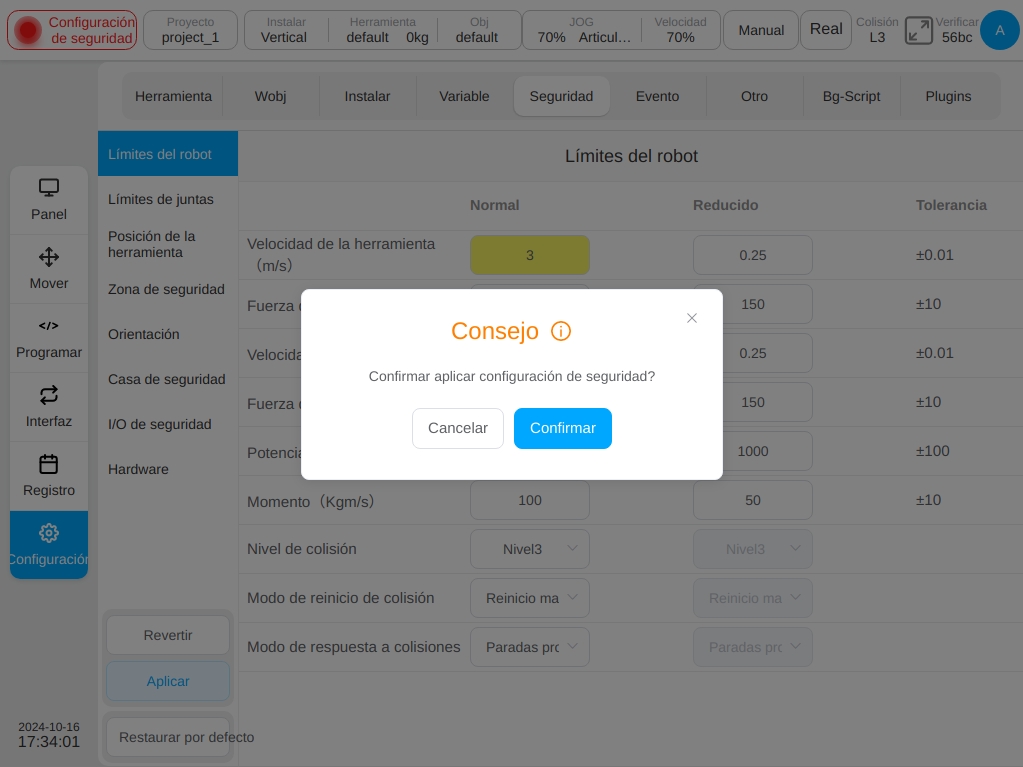
Tras pulsar el botón «Confirmar», aparecerá un cuadro de diálogo para cargar los parámetros de seguridad, como se muestra en la figura.
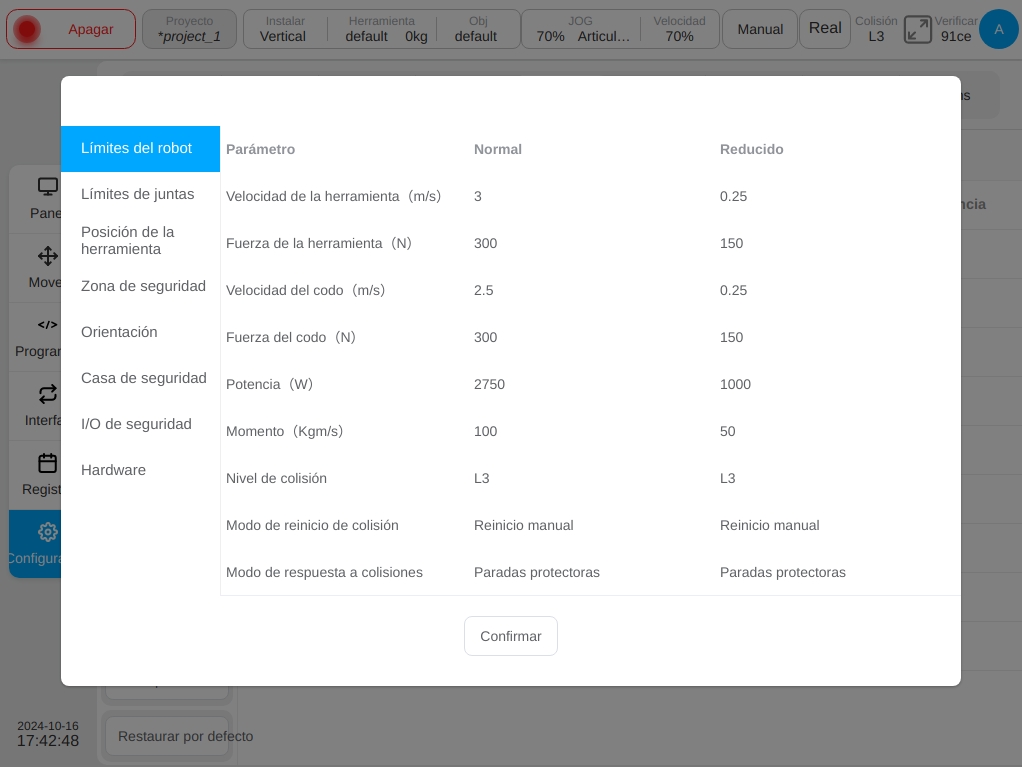
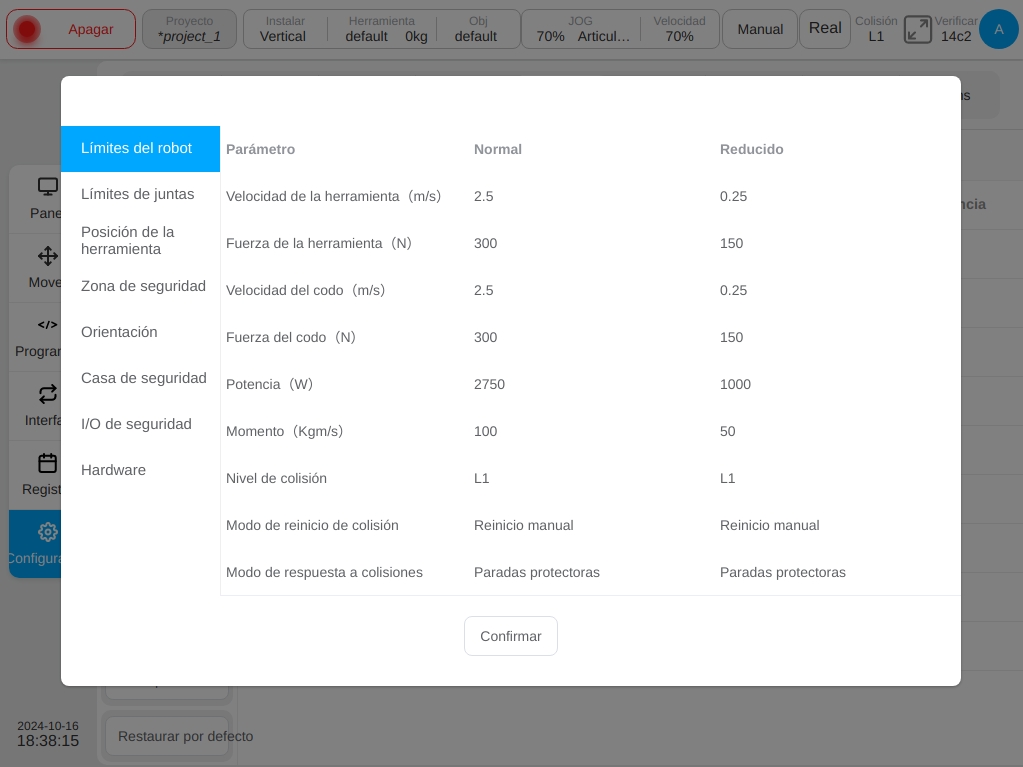
Una vez configurados los parámetros de seguridad, el sistema muestra los parámetros de seguridad configurados en un cuadro de diálogo para su comprobación. Como ejemplo se muestra en la siguiente figura. Una vez comprobado todo, pulse el botón «Aceptar» para configurar los parámetros de seguridad. Cuando la configuración se haya realizado correctamente, se cambiará la comprobación de seguridad situada encima de la barra de estado.
Parámetro de seguridad Descripción#
Esta sección describe los parámetros de configuración de seguridad del robot.
Modo Seguridad#
Modo normal: El modo de seguridad está activado por defecto.
Modo reducido:Este modo puede activarse mediante la entrada de seguridad IO
Modo de recuperación:Cuando los parámetros de movimiento reales del robot superan el límite de seguridad, haciendo que el robot se detenga, se activará el modo de recuperación y el usuario podrá mover el robot dentro del límite de seguridad.
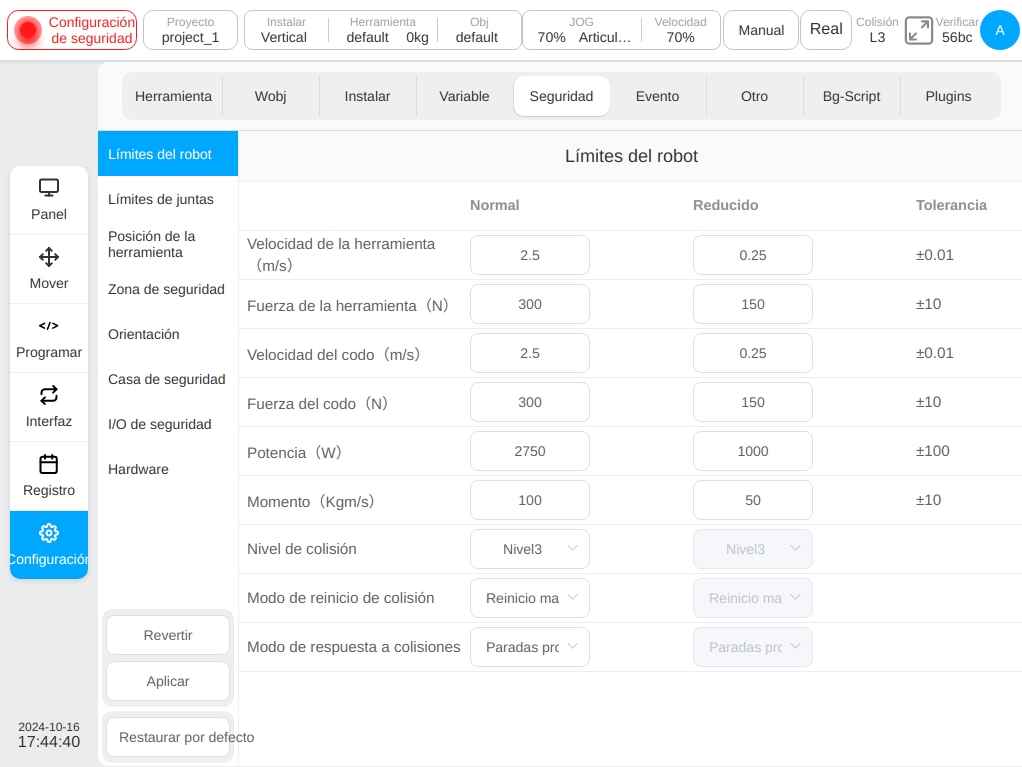
Parámetros de seguridad del robot#
Los parámetros del robot se utilizan para limitar el movimiento general del robot. El usuario puede configurar los valores de sus parámetros en modo normal y en modo reducido.
Velocidad máxima al final Limita la velocidad máxima al final del robot.
Fuerza máxima en el extremo Limita la fuerza máxima aplicada externamente en el extremo del robot.
Velocidad máxima del codo Limita la velocidad máxima del codo del robot.
Fuerza máxima del codo Limita la fuerza externa máxima aplicada por el codo del robot.
Potencia Limitar al exterior la cantidad máxima de trabajo mecánico realizado por el robot.
Parámetros conjuntos de seguridad#
El parámetro límite de articulación se utiliza para limitar el rango de posición, la velocidad máxima y el par máximo de cada articulación del robot. Puedes configurar los valores de sus parámetros en modo normal y en modo reducido
Rango de posición:Define las posiciones mínima y máxima de cada articulación.
Velocidad máxima:Define la velocidad angular máxima de cada articulación.
Par máximo:Defina el par máximo de cada articulación.
PCT de seguridad#
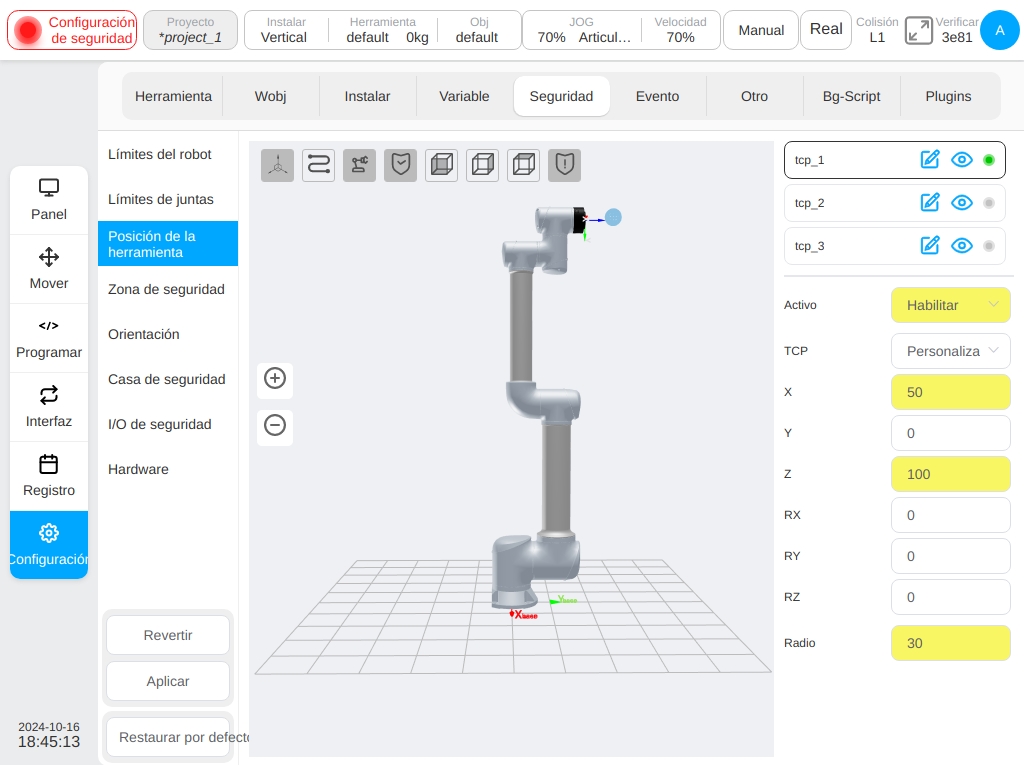
El sistema de seguridad puede definir tres conjuntos de offsets TCP que, una vez configurados, serán utilizados por el robot para monitorizar la velocidad y la posición. Cualquier posición TCP o velocidad que exceda el ajuste de seguridad activará una violación de seguridad.
La supervisión de la velocidad es la velocidad máxima de la herramienta entre los «Parámetros de seguridad del robot». La supervisión de la posición también se denomina «Límite virtual». En el cuadro desplegable, puede seleccionar un TCP existente o personalizar el valor XYZ directamente. Cuando seleccione un TCP existente y cambie el valor en los campos de entrada X, Y y Z, el nombre del TCP en el menú desplegable se convertirá en «Personalizado», indicando el TCP recién definido.
La modificación de los ajustes TCP no afecta a los parámetros de seguridad configurados.
Seguridad IO#
El módulo de E/S de seguridad contiene dos puertos de entrada de seguridad configurables y dos puertos de salida de seguridad configurables.
Las características de entrada de seguridad incluyen:
Entrada de reinicio de guardia: Cuando se produce la parada de guardia, el puerto se activa y el robot vuelve al estado normal.
Entrada de parada de protección en modo automático:Tras la configuración, cuando el robot activa el puerto en modo automático, el robot realiza una parada de protección.
Entrada de reinicio de la protección del modo automático:Cuando se detiene la protección del modo automático, el puerto se activa y el robot vuelve al estado normal.
Entrada de modo reducido: Tras la configuración, este puerto se activa y el robot pasa al modo reducido. El robot se ralentizará para que los límites de los parámetros cumplan los límites de los parámetros de seguridad en el modo reducido.
Las características de salida de seguridad incluyen:
Salida de parada de guardia: Este puerto se activa cuando el robot se encuentra en estado de parada de guardia.
Salida de parada de guardia de modo automático: Este puerto se activa cuando el robot está en modo automático de parada de seguridad.
Salida en modo reducido: Este puerto se activa cuando el robot está en modo reducido.
Límite virtual#
Las fronteras virtuales pueden utilizarse para limitar el espacio de trabajo del robot. Pueden definirse seis límites virtuales para limitar las herramientas y los codos del robot. Cuando las herramientas y los codos del robot tocan el límite virtual, el robot realiza una parada protegida.
El indicador verde de la parte derecha de la interfaz indica que el plano está activado. mientras que la visualización 3D puede mostrar la ubicación de la frontera virtual activada y el área efectiva de la frontera virtual. Cuando se selecciona un plano, el plano correspondiente se resalta en la visualización 3D.
Los límites virtuales se definen de las siguientes maneras:
Seleccione un sistema de coordenadas de referencia, que puede ser el sistema de coordenadas mundial, el sistema de coordenadas base o el sistema de coordenadas de la pieza de trabajo definido en el ajuste; seleccione uno de los ejes (X, Y, Z) del sistema de coordenadas de referencia como eje normal del plano virtual, y establezca la distancia de desplazamiento a lo largo del eje; un valor positivo de la distancia de desplazamiento indica un desplazamiento positivo a lo largo del eje de coordenadas, y un valor negativo indica un desplazamiento negativo a lo largo del eje de coordenadas. De este modo, se determina un plano y, a continuación, se selecciona el área de actividad efectiva del brazo robótico para que esté en ese lado del plano. Por ejemplo, si el sistema de coordenadas de referencia se elige como el sistema de coordenadas base, el eje Z se elige como el eje normal, y la distancia de desplazamiento se establece en 600mm, entonces el plano virtual se forma desplazando el plano XoY del sistema de coordenadas base hacia el eje Z en la dirección positiva en 600mm.
La siguiente figura muestra la interacción correspondiente, seleccione un plano, haga clic en el botón «Activar» y en el botón «Editar», seleccione el sistema de coordenadas de referencia, el eje normal, introduzca la distancia de desplazamiento, seleccione el área efectiva. Haga clic en el botón «Aceptar» para definir el límite virtual, las flechas que aparecen en el plano virtual indican el área activa del robot.
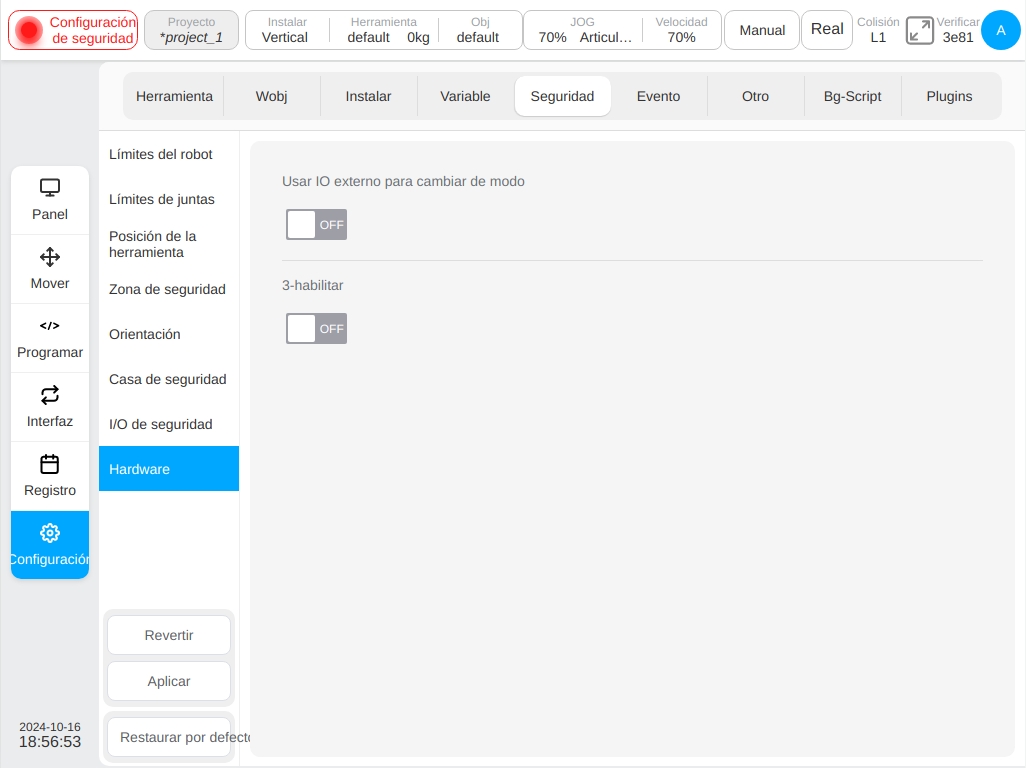
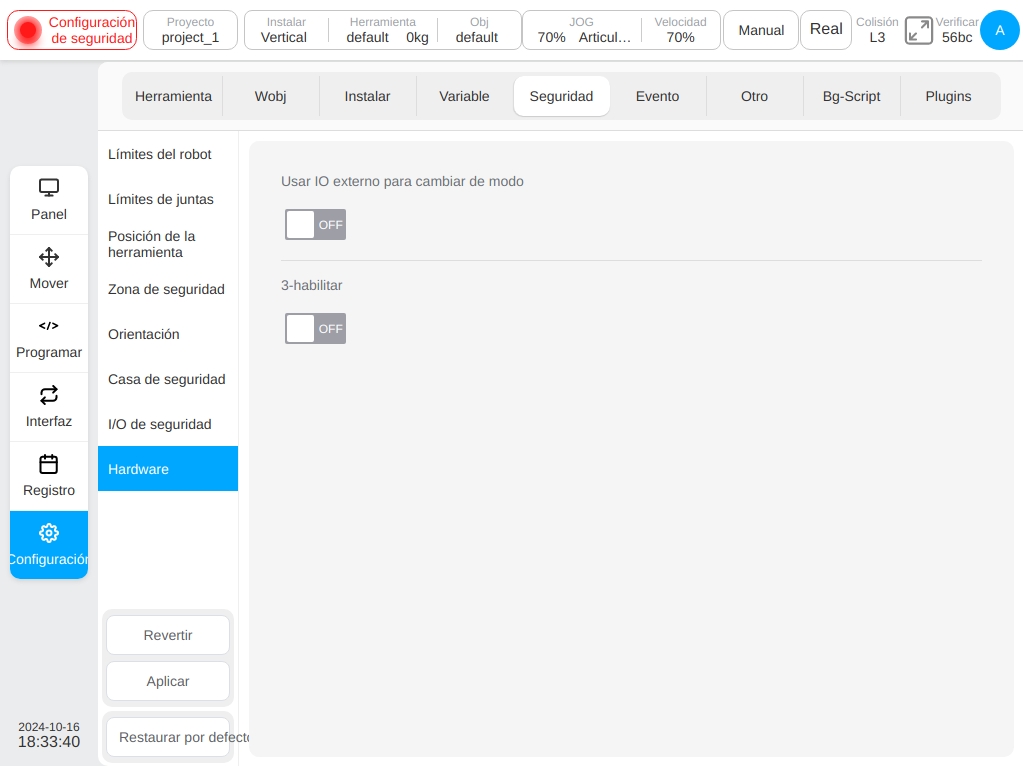
Hardware#
Incluye E/S externa de habilitación para la conmutación de modo y entrada de habilitación de tres posiciones.
Habilitar E/S externa para conmutación de modo: Cuando esta opción está habilitada, la conmutación manual de modo puede realizarse a través de E/S externa. La función de cambio de modo en la barra de estado de la interfaz no es válida.
Entrada de habilitación de tres posiciones: Cuando este elemento está habilitado, mientras el robot está en modo manual, el robot sólo se puede mover cuando el interruptor de tres posiciones de la consola de programación está en la posición central. Cuando el interruptor de tres posiciones está en la posición no-media en cualquier momento durante el movimiento del robot, la función de parada del robot se activará.
DucoSeguridad V2.0#
Ver configuraciones de seguridad#
Haga clic en el botón «Verificación de seguridad» de la barra de estado. Aparece el siguiente cuadro de diálogo para ver los parámetros de configuración de seguridad activados actualmente.
El usuario también puede ver los parámetros de configuración de seguridad en la página de configuración - Configuración de seguridad.
Solicitud de cambio de configuración de seguridad#
Antes de cambiar la configuración de seguridad, el usuario debe utilizar la contraseña para desbloquear el robot. Entrando en la página “Setup” - “Configuración de Seguridad”, haga clic en el botón “Desbloquear” en la parte inferior izquierda, sólo en el caso de fallo de alimentación se puede desbloquear, introduzca la contraseña (la contraseña de inicio de sesión del usuario conectado actual) y, a continuación, entre en el modo de configuración de parámetros de seguridad después de pasar la verificación. En este momento, el área de visualización de estado de la barra de estado muestra “Configuración de parámetros de seguridad”.
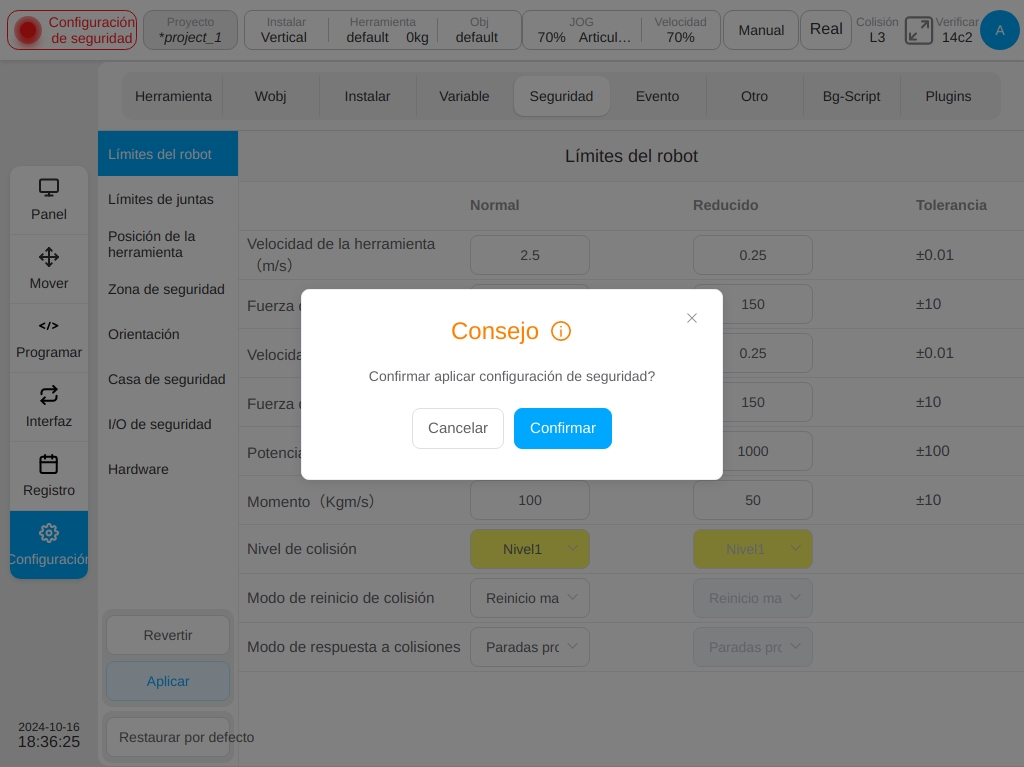
Tras pulsar el botón «Confirmar», aparecerá un cuadro de diálogo para cargar los parámetros de seguridad, como se muestra en la figura.
Una vez configurados los parámetros de seguridad, el sistema muestra los parámetros de seguridad configurados en un cuadro de diálogo para que los compruebe. Compruebe y confirme la siguiente figura. Pulse el botón «Aceptar» para configurar los parámetros de seguridad. Cuando la configuración se ha realizado correctamente, cambia la comprobación de seguridad situada encima de la barra de estado.
Parámetro de seguridad Descripción#
Esta sección describe los parámetros de configuración de seguridad del robot.
Modo Seguridad#
Modo normal: El modo de seguridad está activado por defecto.
Modo Reducción:Este modo puede activarse mediante la entrada de seguridad IO.
Modo de recuperación:Cuando los parámetros de movimiento reales del robot superan el límite de seguridad, haciendo que el robot se detenga, se activará el modo de recuperación y el usuario podrá mover el robot dentro del límite de seguridad.
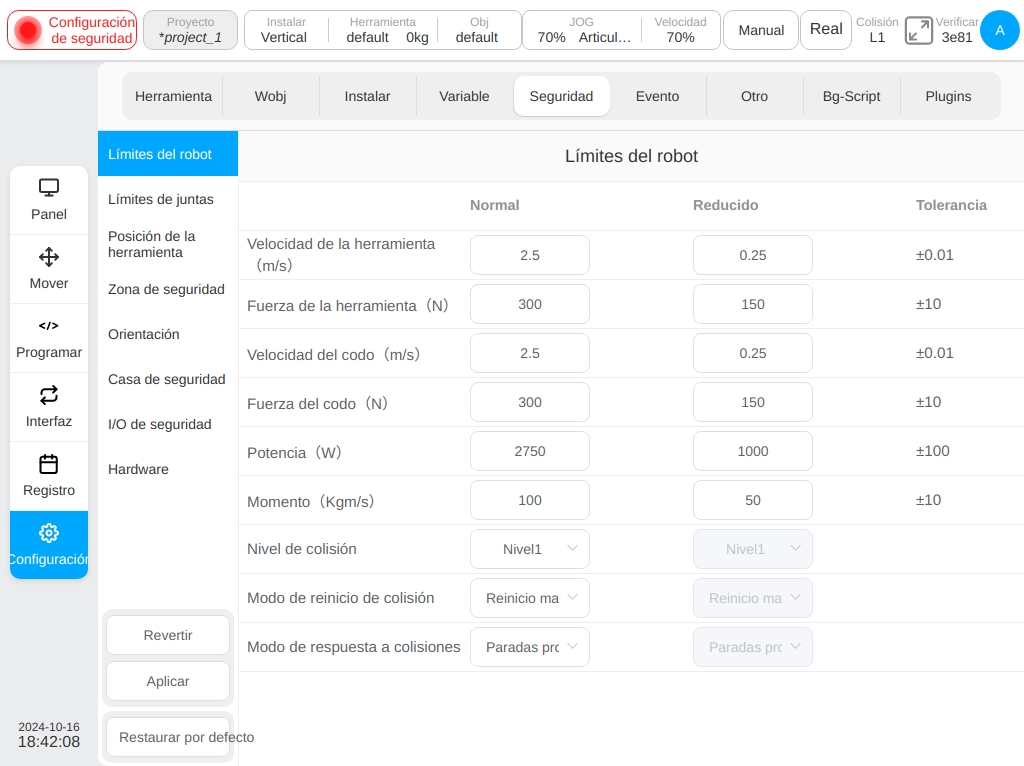
Parámetros de seguridad del robot#
Los parámetros del robot se utilizan para limitar el movimiento general del robot. El usuario puede configurar los valores de sus parámetros en modo normal y en modo reducido.
Velocidad máxima del extremo Limita la velocidad máxima del extremo del robot.
Fuerza final máxima Limita la fuerza máxima aplicada externamente en el extremo del robot.
Velocidad máxima del codo Limita la velocidad máxima del codo del robot.
Fuerza máxima del codo Limita la fuerza externa máxima aplicada por el codo del robot.
Potencia Limita el trabajo mecánico máximo realizado por el robot al exterior y el extremo de carga del robot se considera parte del cuerpo del robot.
Momento máximo Limita el momento máximo de salida del robot y el final de la carga del robot se considera parte del cuerpo del robot.
Nivel de detección de colisiones Sensibilidad del robot para detectar colisiones con el exterior, a mayor nivel, mayor sensibilidad.
Modo de restablecimiento de colisión Un método para restablecer el robot después de una colisión.
Modo de respuesta ante colisiones Un método para que el robot responda tras una colisión.
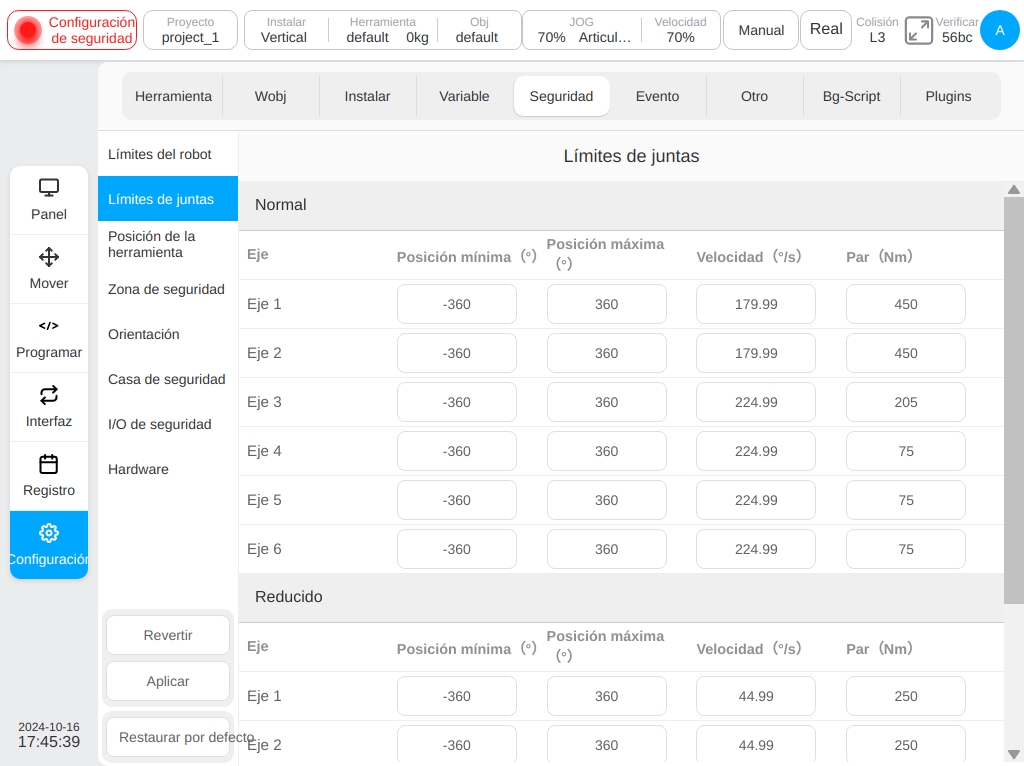
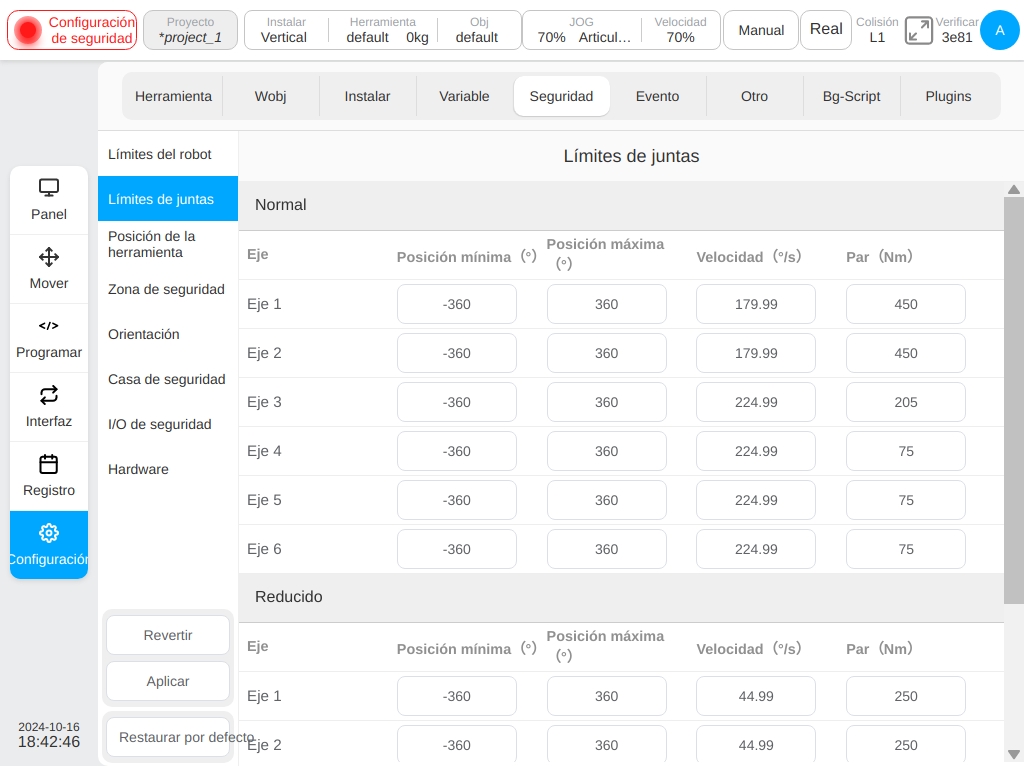
Parámetros conjuntos de seguridad#
El límite de parámetros de articulación se utiliza para limitar el rango de posición, la velocidad máxima y el par máximo de cada articulación del robot. El usuario puede configurar los valores de sus parámetros tanto en modo normal como en modo reducido.
Rango de posición:Define las posiciones mínima y máxima de cada articulación.
Velocidad máxima:Define la velocidad angular máxima de cada articulación.
Torsión máxima:Define la torsión máxima de cada articulación.
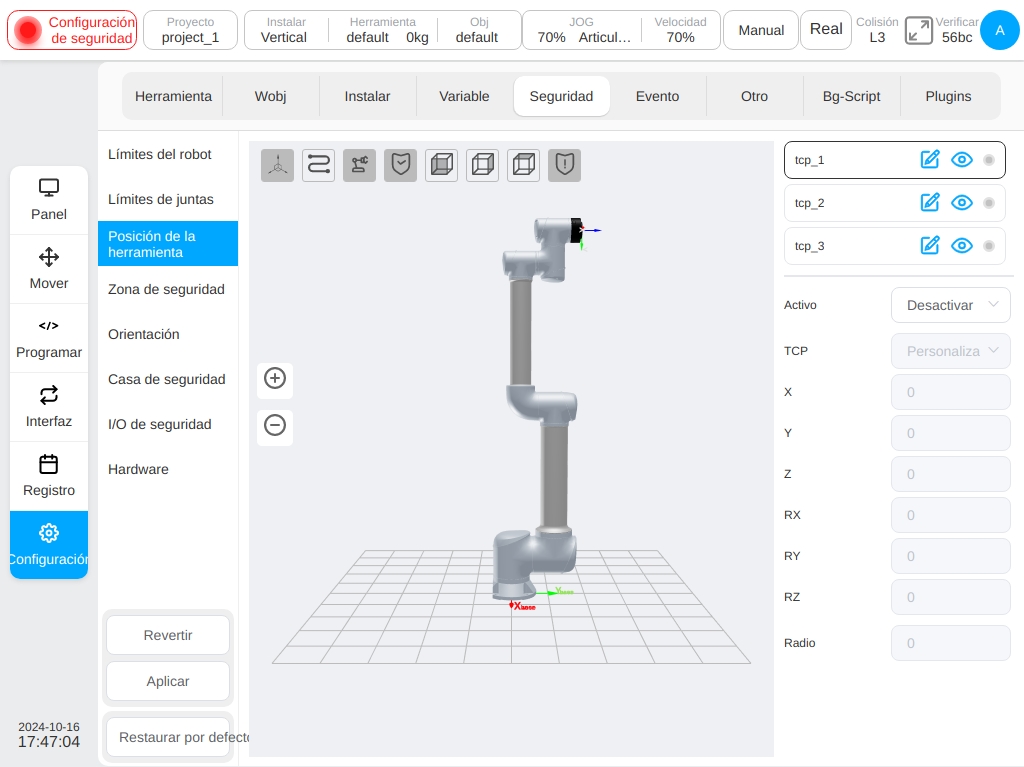
PCT y herramientas de seguridad#
El sistema de seguridad puede definir tres conjuntos de offsets TCP que, una vez configurados, serán utilizados por el robot para la monitorización de la velocidad y la posición. Cualquiera de las posiciones y velocidades del TCP que exceda el ajuste de seguridad activará una violación de seguridad.
La supervisión de la velocidad es la velocidad lineal máxima del centro del TCP de seguridad del robot en el espacio en los «Parámetros de seguridad del robot», mientras que la supervisión de la ubicación también se denomina «Área segura». Pueden establecerse tres TCPs de seguridad mientras que hay dos formas de definir los TCPs, ya sea eligiendo el sistema de coordenadas de la herramienta definido en las variables globales o personalizando el valor del sistema de coordenadas de entrada. Cuando se utiliza un sistema de coordenadas de herramienta predefinido, se selecciona el sistema de coordenadas de herramienta y el valor del sistema de coordenadas de herramienta se muestra en el cuadro de entrada X, Y, Z. Si se modifican los valores X, Y, Z, el sistema de coordenadas pasa a ser personalizado. ¡Si se modifica el valor del sistema de coordenadas correspondiente en la variable global y no coincide con el valor del sistema de coordenadas utilizado en la configuración de seguridad actual, aparecerá un icono de alerta “! Cuando se selecciona “Datos de entrada personalizados”, los valores de X, Y, Z, Rx, Ry, Rz y el radio de la bola de la envolvente se editan directamente.
Cada TCP de seguridad puede configurarse como desactivado, siempre activo, modo automático activo, configuración de combinación de seguridad 1, configuración de combinación de seguridad 2 en total cinco tipos diferentes de condiciones de activación. Cuando los tres TCP están desactivados, el sistema de control de seguridad adopta por defecto un sistema de coordenadas de brida con un radio de bola de 50 mm. El estado de configuración del TCP se muestra en la lista de configuración del TCP. Si un determinado TCP está desactivado, el estado correspondiente se muestra en gris. El TCP de seguridad configurado puede mostrar el sistema de coordenadas y la esfera envolvente en el área de visualización 3D y puede pasar el nombre del TCP correspondiente con el icono  se muestra y se oculta. Haga clic junto al nombre del TCP con el icono
se muestra y se oculta. Haga clic junto al nombre del TCP con el icono  para cambiar el nombre predeterminado del TCP. El TCP de seguridad que no esté desactivado se mostrará
para cambiar el nombre predeterminado del TCP. El TCP de seguridad que no esté desactivado se mostrará  . En caso contrario, se mostrará
. En caso contrario, se mostrará  .
.
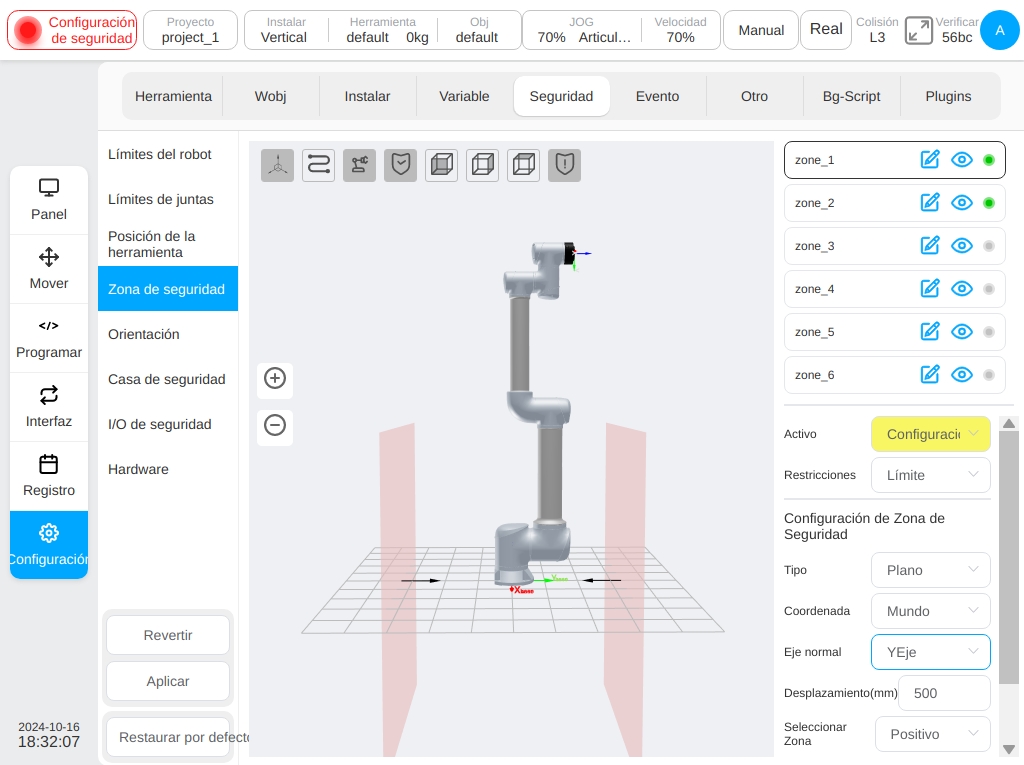
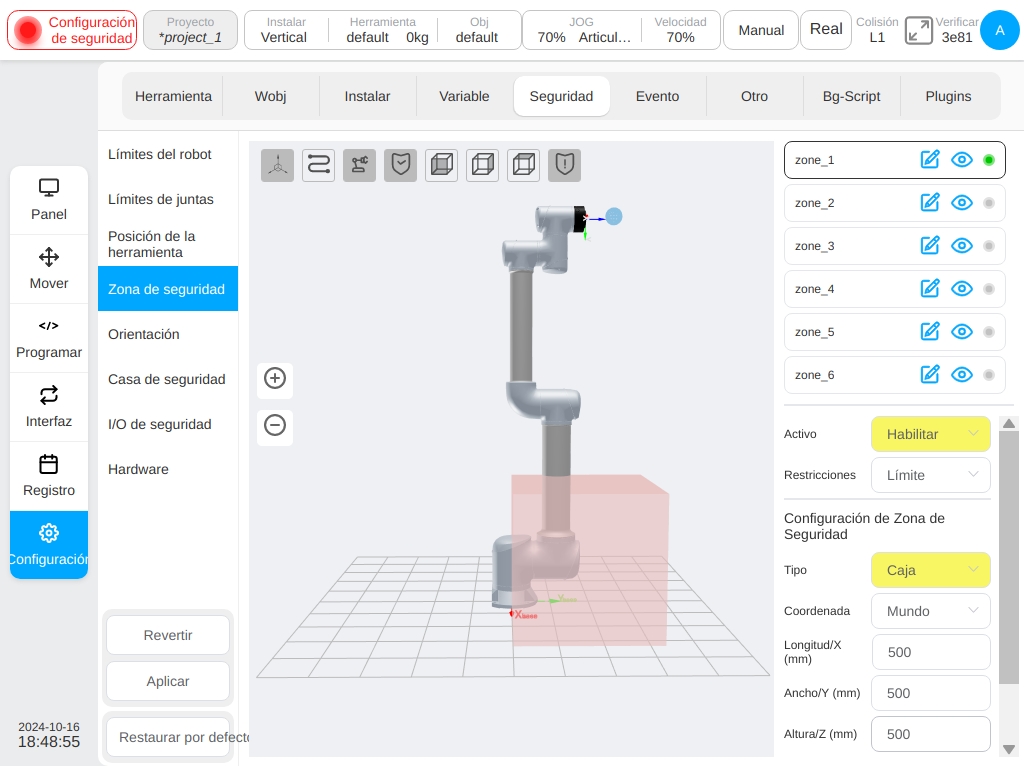
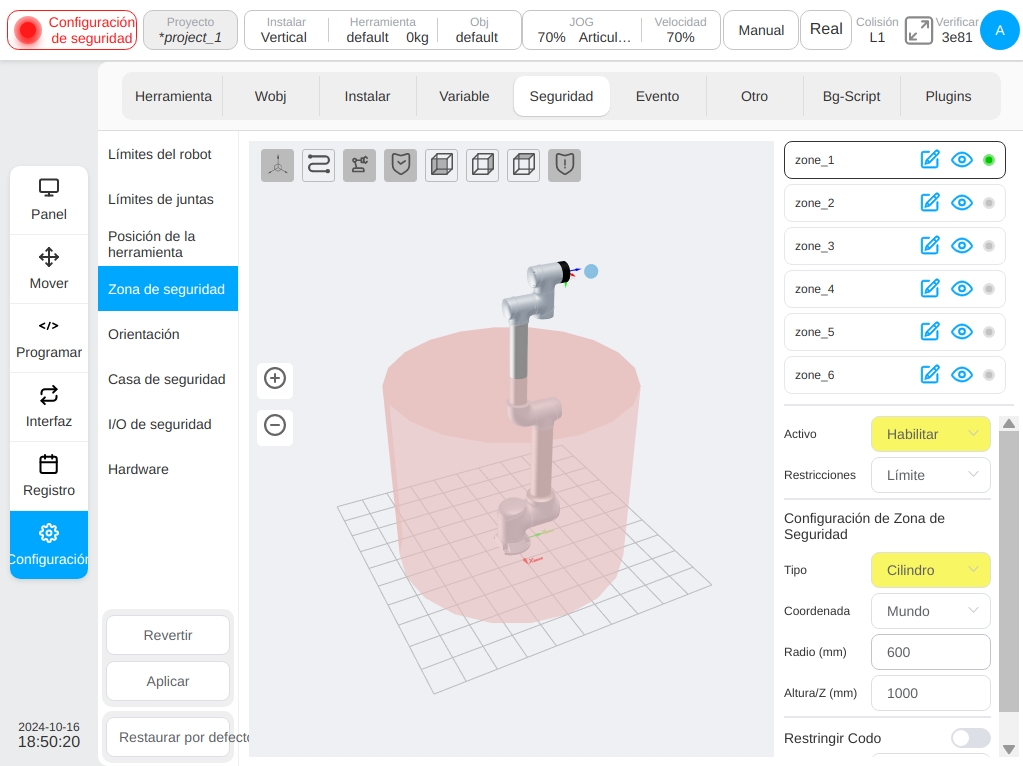
Zona de seguridad#
Los tipos de definición de zonas de seguridad incluyen plano, rectángulo y cilindro. Los usuarios pueden configurar hasta seis zonas espaciales independientes. Haga clic en el icono situado junto al nombre de la zona de seguridad para mostrar u ocultar la zona de seguridad configurada en la zona de visualización 3D. Y se puede hacer clic en el icono situado junto al nombre de la zona de seguridad (por ejemplo, el nombre predeterminado zona_1) para cambiar su nombre. se mostrará si la zona segura no está desactivada, en caso contrario se mostrará .
Las configuraciones de activación de la zona de seguridad incluyen: Desactivado, Siempre activo, Modo automático activo, Configuración de grupo de seguridad 1 y Configuración de grupo de seguridad 2.
La respuesta del límite de la zona de seguridad se refiere a la respuesta del robot que entra en la zona de seguridad desde el exterior y se desplaza más allá del límite desde el interior. Existen dos modos de respuesta: limitar el movimiento más allá del límite y activar el modo de reducción al entrar en la zona. Cuando el límite seleccionado sobrepasa el límite, se describe la respuesta del robot que se desplaza más allá del límite. Cuando se selecciona la activación del modo reducir, se describe la respuesta del robot que entra en la zona desde el exterior, y se restablece el modo normal cuando el robot sale de la zona.
La zona espacial también puede configurarse para incluir límites de codo con el rango espacial del codo se establece en la forma de un radio esférico.
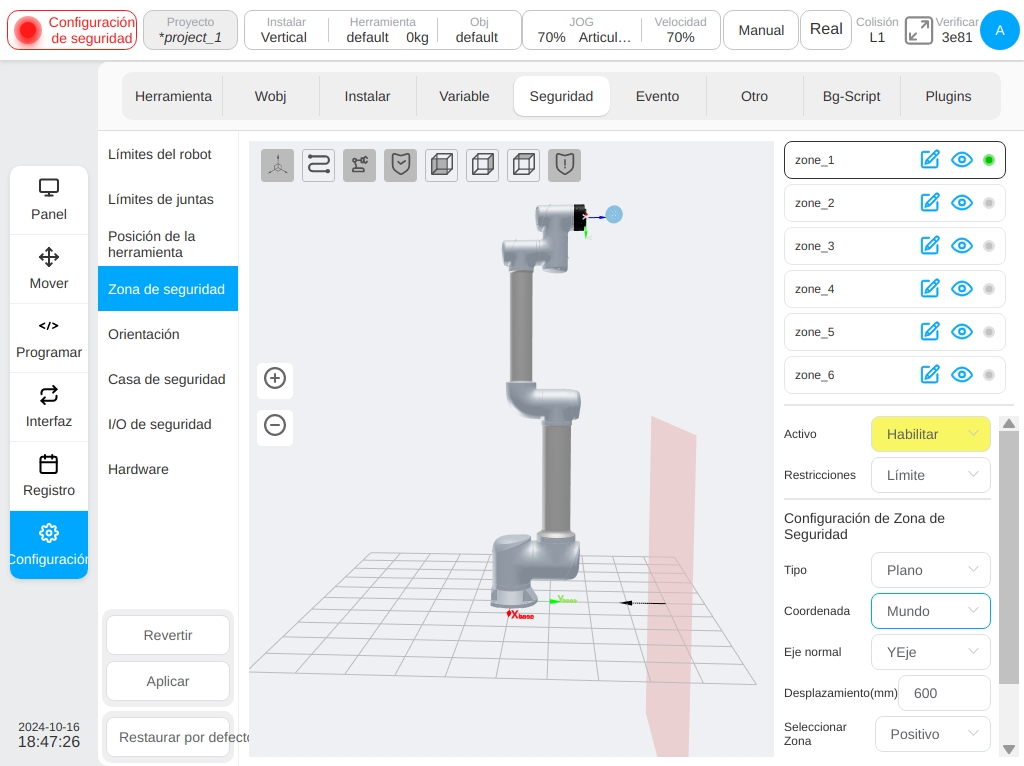
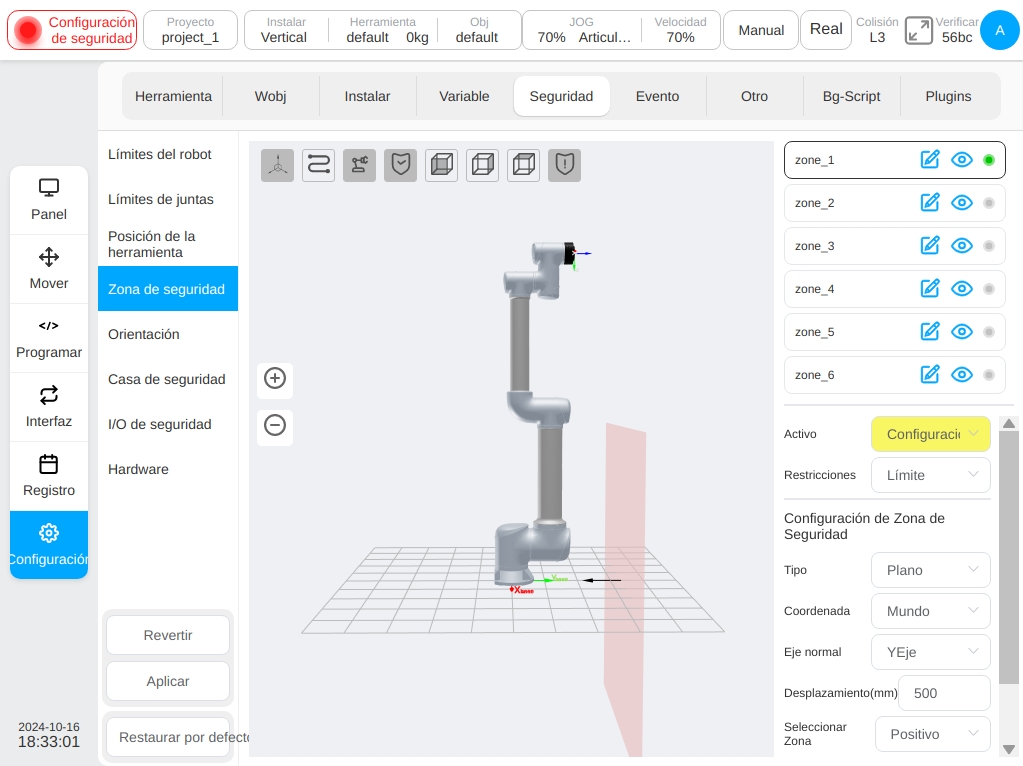
Cuando el tipo de zona de configuración es plano, la referencia de la zona plana se basa en el sistema de coordenadas mundo/base/sistema de coordenadas de la pieza de trabajo y el plano se determina estableciendo la normal y el desplazamiento normal del plano. La configuración del plano puede establecerse para que tenga efecto seleccionando una región, y la dirección correspondiente se muestra mediante una flecha negra en la zona 3D.
Cuando el tipo de zona de configuración es cuboide espacial, la base de configuración de la zona cuboide se basa en el sistema de coordenadas mundo/base/sistema de coordenadas de la pieza de trabajo y el sistema de coordenadas de la pieza de trabajo se utiliza como punto de esquina del cuboide con las tres direcciones de los ejes de coordenadas correspondientes a la longitud (X), anchura (Y) y altura (Z) respectivamente. La longitud, la anchura y la altura oscilan entre -3000 mm y 3000 mm.
Cuando el tipo de zona de configuración es un cilindro espacial, la referencia de ajuste se basa en el sistema de coordenadas mundo/base/sistema de coordenadas de la pieza de trabajo con el sistema de coordenadas de la pieza de trabajo como centro del plano circular, la dirección Z apunta a la dirección de altura, y el radio y la altura pueden ajustarse. El radio varía de 0 a 3000mm, y la altura varía de -3000mm a 3000mm.
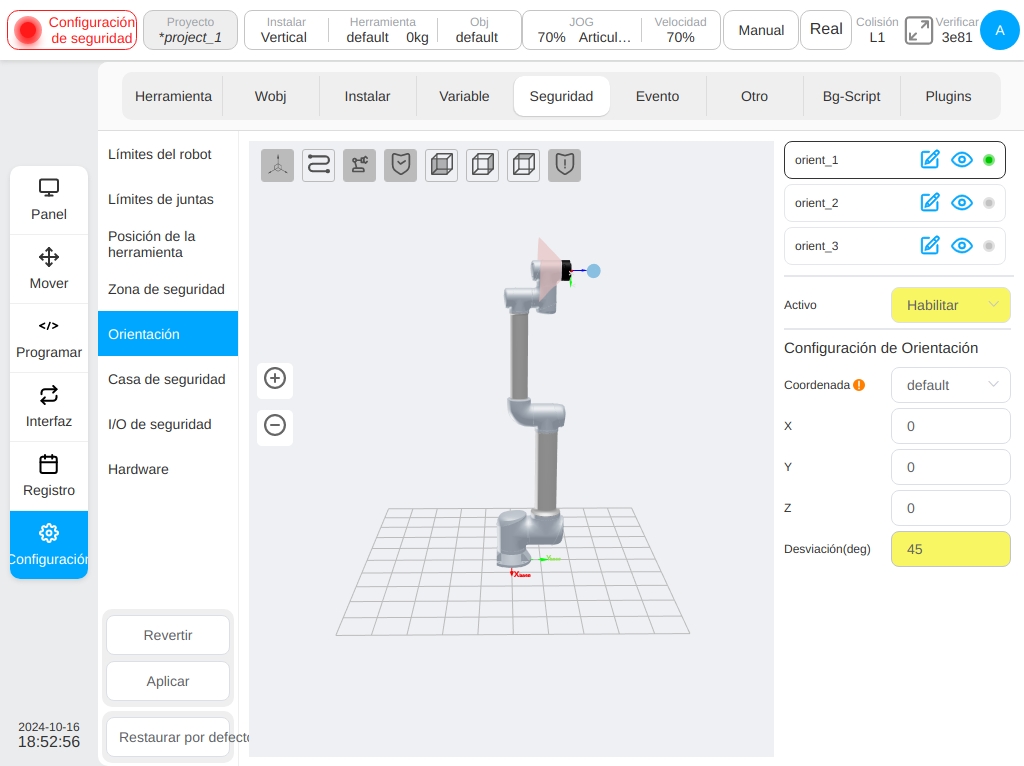
Zona de seguridad postural#
El ajuste de la zona de postura de seguridad. La zona de postura se refiere a la formación de un ángulo cónico alrededor de un vector de dirección en el sistema de coordenadas base del robot. La restricción de postura sólo restringe el eje Z del robot TCP a la zona de postura. Los usuarios pueden establecer hasta tres zonas de postura. Una sola zona de postura puede mostrarse u ocultarse haciendo clic en el icono situado junto al nombre a la derecha de la zona de postura, que está configurado por defecto para mostrarse. Se puede hacer clic en el icono situado tras el nombre para modificar el nombre de la zona de postura. El icono se mostrará si la zona de postura no está desactivada; en caso contrario, se desactivará .
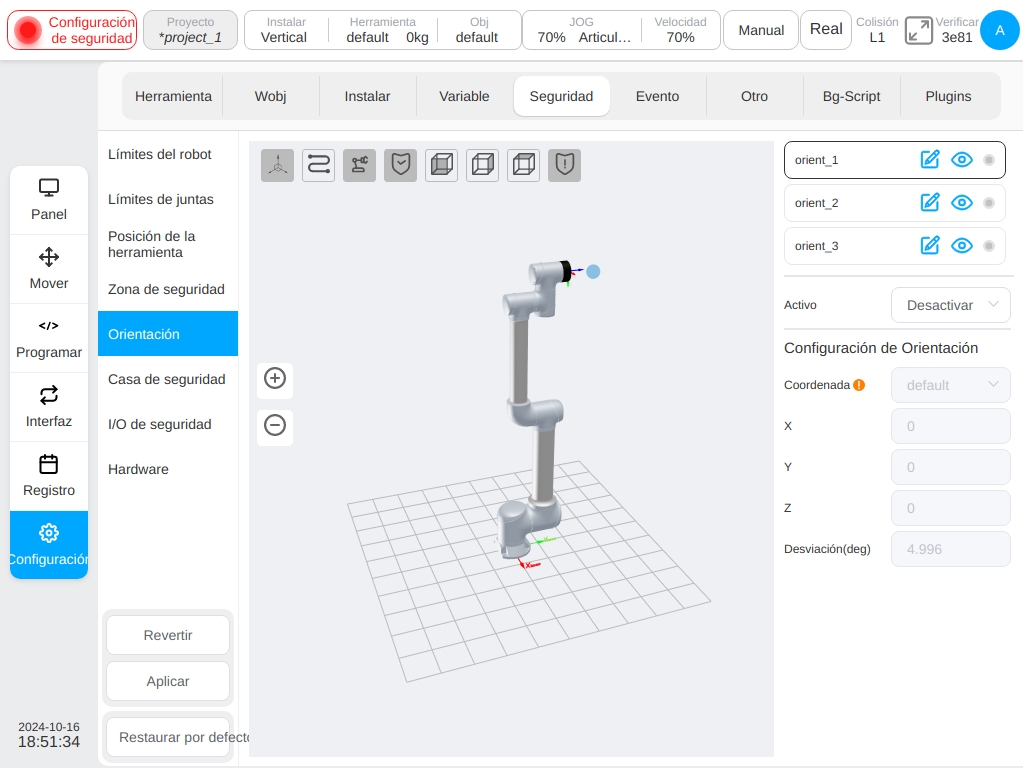
La zona de postura de seguridad puede activarse en cinco modos: Desactivada, Siempre activa, Modo automático activo, Configuración del grupo de seguridad 1 y Configuración del grupo de seguridad 2. La zona de postura de seguridad se diferencia de la zona de seguridad en que sólo se restringe la dirección del eje Z de TCP y sólo hay un modo de respuesta que activa la parada de protección tras sobrepasar la zona.
Existen tres formas de definir un sistema de coordenadas de referencia para la zona de postura de seguridad: Personalizada, capturar la postura actual del TCP y definirla mediante un sistema de coordenadas de pieza de trabajo predefinido. Cuando se selecciona Personalizado, modificar manualmente el valor del vector de dirección X, Y, Z, que describe el valor en el sistema de coordenadas de la base del robot; Cuando se selecciona la actitud actual del TCP, la dirección del eje Z del TCP actual se toma como dirección de referencia de la zona de postura y la dirección se convierte al sistema de coordenadas de la base del robot para describir el vector de dirección X, el vector de dirección Y, el vector de dirección Z. Si el valor se modifica manualmente, se convertirá en un modo personalizado. Cuando se define por el sistema de coordenadas de la pieza de trabajo, la dirección del eje Z del sistema de coordenadas de la pieza de trabajo se toma como la dirección de referencia de la zona de postura y se convierte al sistema de coordenadas de la base del robot, el valor se convertirá en un modo personalizado después de la modificación manual.
Si la orientación del sistema de coordenadas de la pieza se ha modificado externamente, aparece un icono recordatorio en el sistema de coordenadas de referencia. El ángulo de desviación de la zona oscila entre 5 y 180 grados. Por ejemplo:
Seguridad en el hogar#
En el caso de los ajustes de «Seguridad en el hogar», la monitorización de «Seguridad en el hogar» sincronizará los ajustes de ubicación del hogar en la página de ajustes «Otros». Si la ubicación en los ajustes de «Seguridad en el hogar» es diferente de la ubicación de inicio en los ajustes de «Otros», aparecerá un icono recordatorio en los ajustes de «Sincronizar inicio». Si los ajustes no están sincronizados, la posición de Inicio del sistema está sujeta a los ajustes de Seguridad. Los ajustes del controlador de seguridad prevalecen para el punto Home “Pulsar Home” en la interfaz móvil y la salida de señales Home desde otros puertos (por ejemplo, el puerto 2001) del robot. El punto Home en la página de ajustes “Otros” sólo se utiliza como registro y no sirve como base para juzgar el punto Home. El umbral de monitorización del punto Home puede ajustarse y el valor oscila entre 1 y 5°.
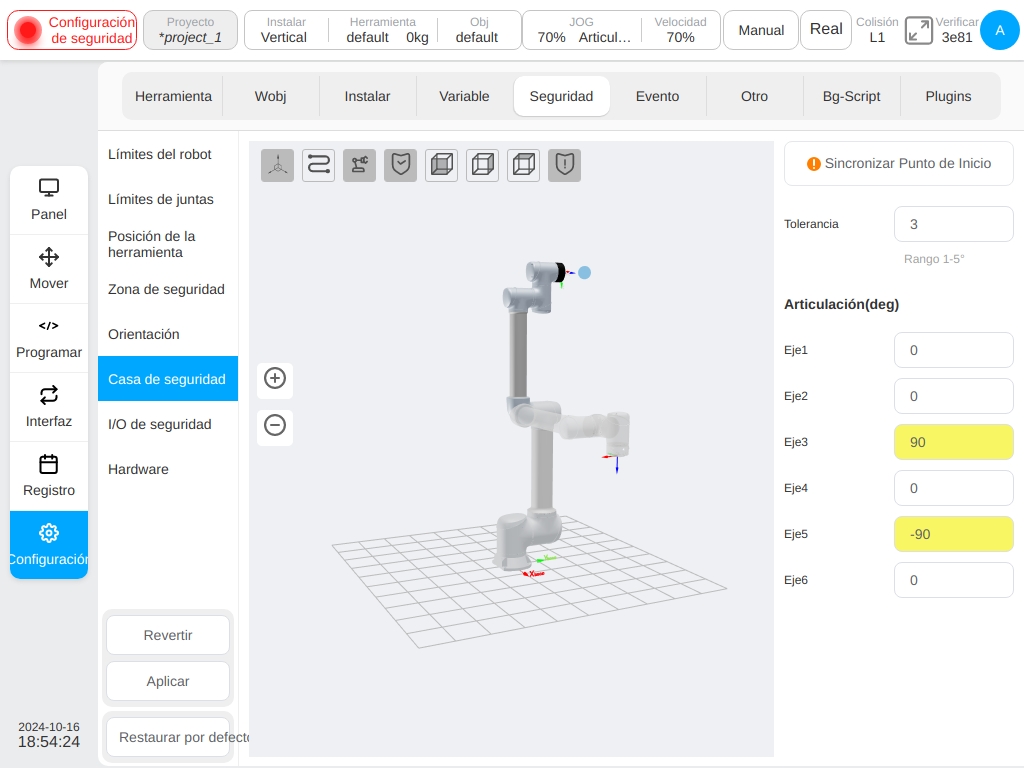
Cuando se selecciona la sincronización de la posición de inicio, se muestra el ángulo de articulación de la posición de inicio. Y el modelo de robot en el área de visualización del modelo 3D se actualiza a la ubicación correspondiente.
Cuando se establece la posición inicial de seguridad y se configura la salida de posición inicial en la E/S de seguridad (véase el Apartado 6.2.3.8), todos los ángulos de articulación del robot se encuentran dentro del rango de posición inicial establecido (valor de consigna-umbral, valor de consigna + umbral) y la velocidad se aproxima a 0°/s (para filtrar la salida normal del encoder). La velocidad de articulación predefinida por el sistema es inferior a 2°/s), y dura 500 milisegundos (predefinida por el sistema y no configurable), ya que la señal es alcanzada por la salida de seguridad salida externa localización de origen.
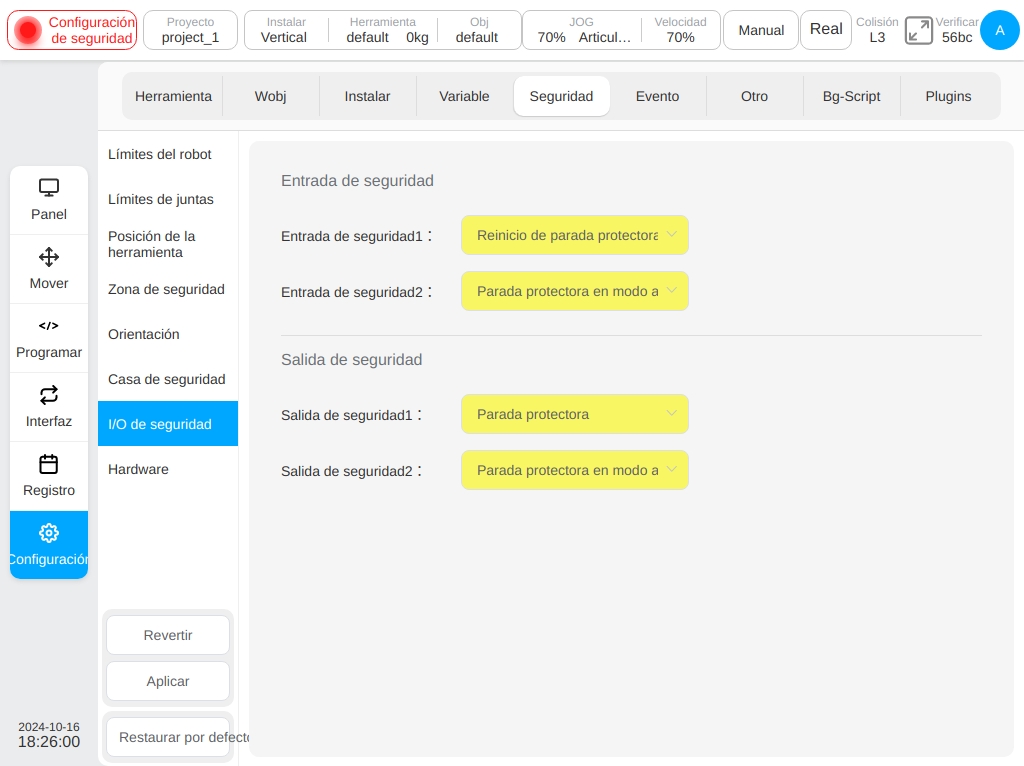
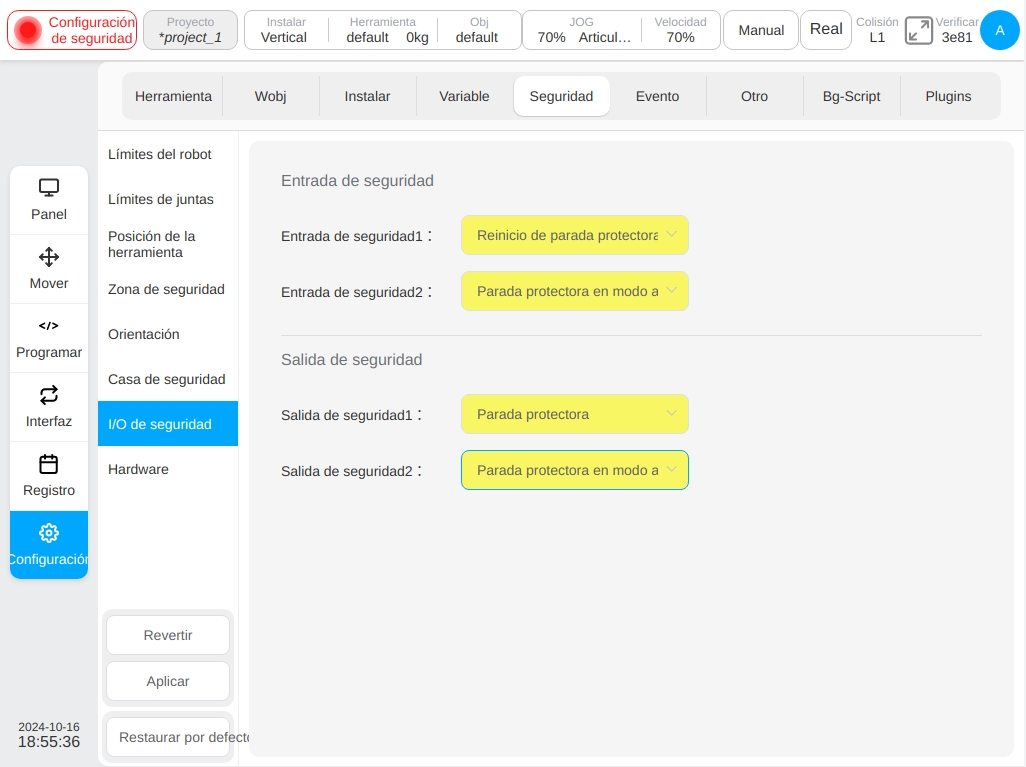
Seguridad IO#
El módulo de E/S de seguridad contiene dos puertos de entrada de seguridad configurables y dos puertos de salida de seguridad configurables.
Las características de entrada de seguridad incluyen:
Entrada de rearme de protección:Cuando se produce la parada de protección, el puerto se dispara y el robot vuelve al estado normal.
Entrada de Parada de Protección en Modo Automático:Tras la configuración, cuando el robot activa el puerto en modo automático realiza una parada de protección.
Entrada de reinicio de protección de modo automático:Cuando se realiza la parada de protección de modo automático, el puerto se activa y el robot vuelve al estado normal.
Entrada de Modo Reducido:Tras la configuración, este puerto se activa y el robot pasa a modo reducido. El robot se ralentizará cuando los límites de los parámetros cumplan los límites de los parámetros de seguridad en modo reducido.
Configuración de combinación de seguridad 1/2:Cuando se activa el puerto de configuración de combinación de seguridad 1 o de configuración de combinación de seguridad 2, se activarán y supervisarán todas las funciones de seguridad configuradas en la configuración de combinación de seguridad 1 o en la configuración de combinación de seguridad 2, incluidas las herramientas de seguridad, las zonas de seguridad y las áreas de postura de seguridad.
Las características de salida de seguridad incluyen:
Salida de parada de protección: Este puerto se activa cuando el robot se encuentra en estado de parada de protección.
Salida de parada de protección en modo automático: Este puerto se activa cuando el robot está en parada de protección en modo automático.
Salida Modo Reducción: Este puerto se activa cuando el robot está en modo reducción.
Ubicación de seguridad: Este puerto se activa cuando el robot está cerca de la ubicación de seguridad;
Hardware#
Incluye E/S externa habilitada para conmutación de modo y tres entradas de habilitación de posición
Activar E/S externa para cambio de modo:Si se activa esta opción, el cambio de modo manual se puede realizar a través de E/S externa. La función de cambio de modo en la barra de estado de la interfaz no es válida.
Entrada de habilitación de tres posiciones: Cuando está habilitada, si el robot está en modo manual, sólo puede moverse cuando el interruptor de tres posiciones de la consola de programación está en la posición central. Cuando el interruptor de tres posiciones está en la posición no-media en cualquier momento durante el movimiento del robot, el robot se detendrá.