Visão geral do sistema#
Gestão de projectos#
O sistema suporta a gestão de vários projectos, enquanto os dados do projeto incluem o programa do robô, variáveis globais do projeto, definições do projeto e outras informações. Quando o sistema inicia o carregamento, os dados do projeto atual são carregados de acordo com as definições do sistema. Outros dados de projeto não podem ser utilizados no projeto atual.
Cuidado
Todos os dados do projeto, tais como as definições na página de interface, as definições na página de definições, etc., têm de ser guardados após a definição do projeto, para que este seja corretamente carregado na próxima inicialização.
Gestão de utilizadores#
O sistema suporta a gestão multi-utilizador. As permissões de utilizador são definidas como: operador, programador, responsável pela manutenção e administrador. As permissões específicas são descritas a seguir:
Operador
Permite a seleção do projeto, programa em execução, execução manual do programa, visualização do estado do robô, etc.
Programador
Permissões de utilizador operador
Programação do programa do robô, configuração do projeto
O nome de utilizador padrão é padrão e a palavra-passe inicial é 123
Mantenedor
Permissões de utilizador operador
Atualização do sistema
Administrador
Permissões do utilizador mantenedor
Gestão de usuários
O nome de utilizador é admin e a password inicial é 123
Síntese da página do utilizador#
Como mostra a figura, a interface geral divide-se principalmente em três partes: a barra de estado principal, a barra de navegação esquerda e a área de conteúdo direita. A área de conteúdo apresenta diferentes conteúdos (subpáginas) com base nas diferentes selecções da barra de navegação esquerda. Por baixo da barra de navegação encontra-se a entrada do plug-in e a data e hora do sistema.
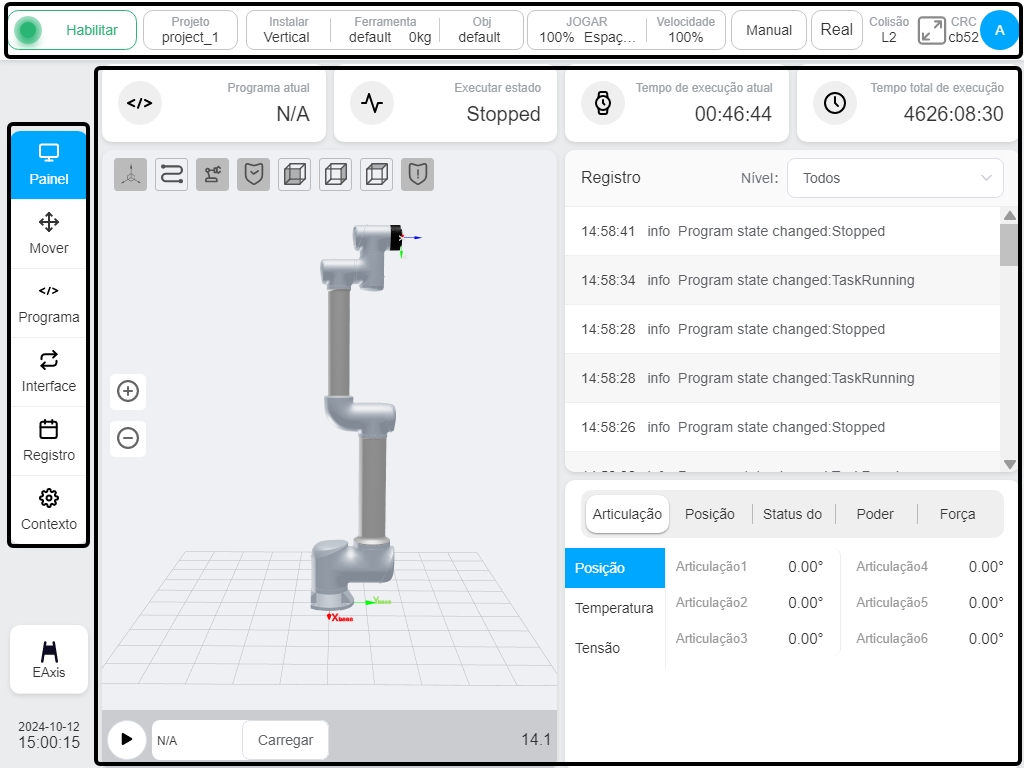
As principais informações apresentadas na barra de estado incluem: luz indicadora do estado da junta do robô, visualização do estado, projeto atual, direção de instalação do robô, informações sobre o sistema de coordenadas da ferramenta atual e o sistema de coordenadas da peça de trabalho, percentagem de velocidade, modo de funcionamento, informações de definição da deteção de colisão, código de verificação de segurança e informações do utilizador.
A barra de navegação contém seis ícones: Painel de controlo, Mover, Programa, Interface, Registo e Definição. Clicar no ícone da barra de navegação para mudar o conteúdo apresentado na área de conteúdo. Os principais conteúdos de cada página são descritos de seguida:
A página de síntese é uma página de visualização da produção que permite selecionar programas a executar e apresenta informações básicas como o estado do programa, o tempo de execução do sistema, os registos do sistema e as posições conjuntas.
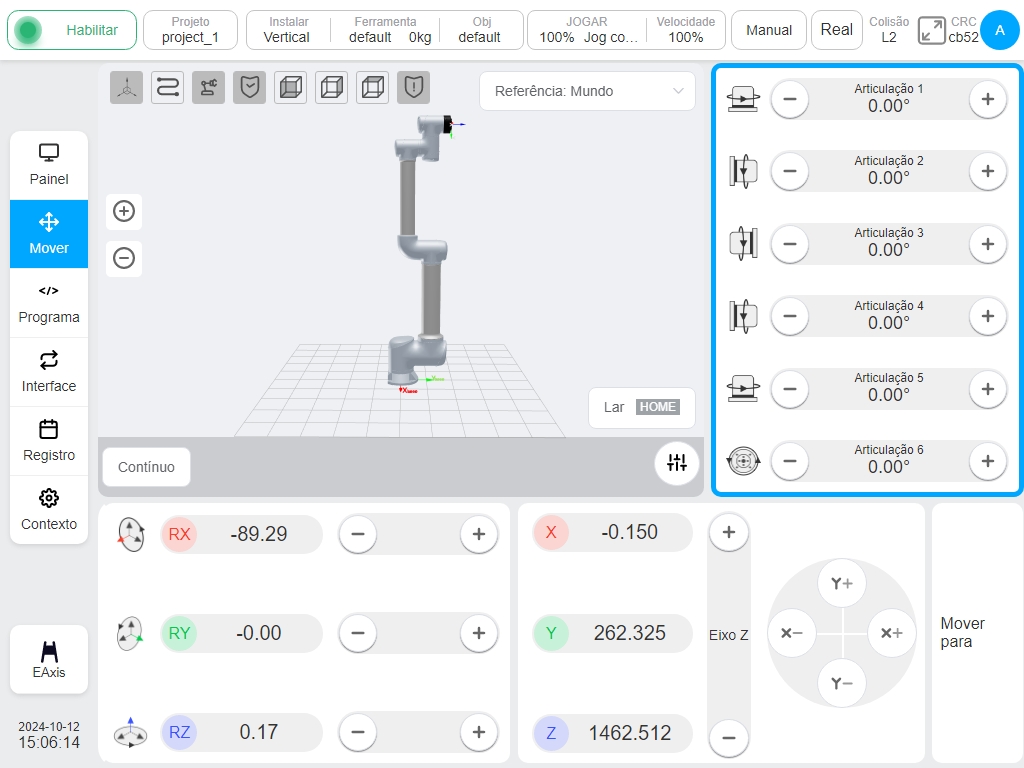
A interface de movimento permite ao utilizador operar manualmente o robô, definir o sistema de coordenadas, bem como o modo de movimento do movimento manual.
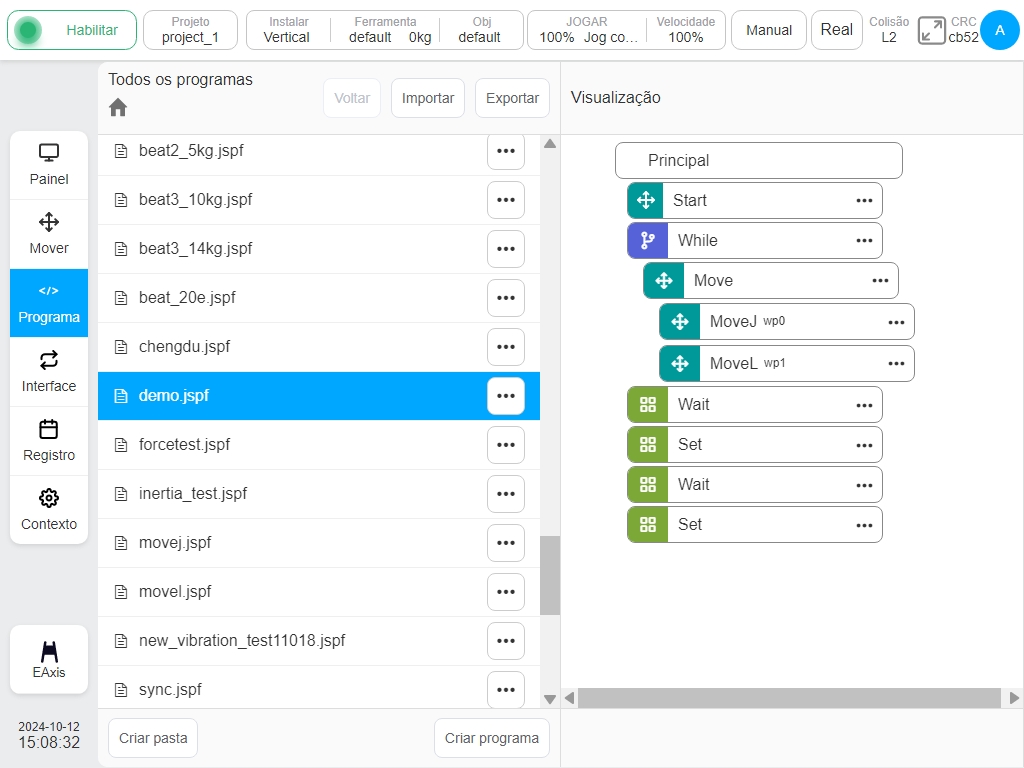
A interface do programa é a página principal de programação do robô, onde o utilizador pode gerir os ficheiros de programa no projeto, bem como escrever as tarefas do robô através do ambiente de programação gráfica fornecido.
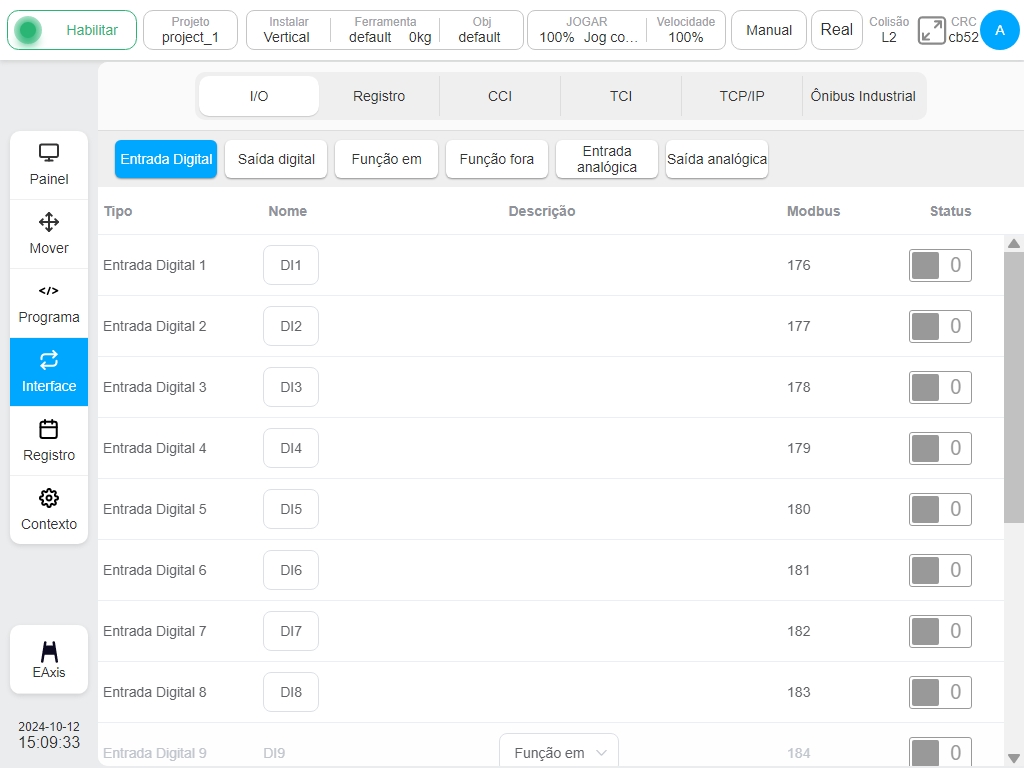
A página de interface permite ao utilizador configurar todas as interfaces externas do robô, incluindo entrada e saída digitais, entrada e saída analógicas, interfaces TCP/IP e outras interfaces de fieldbus industriais.
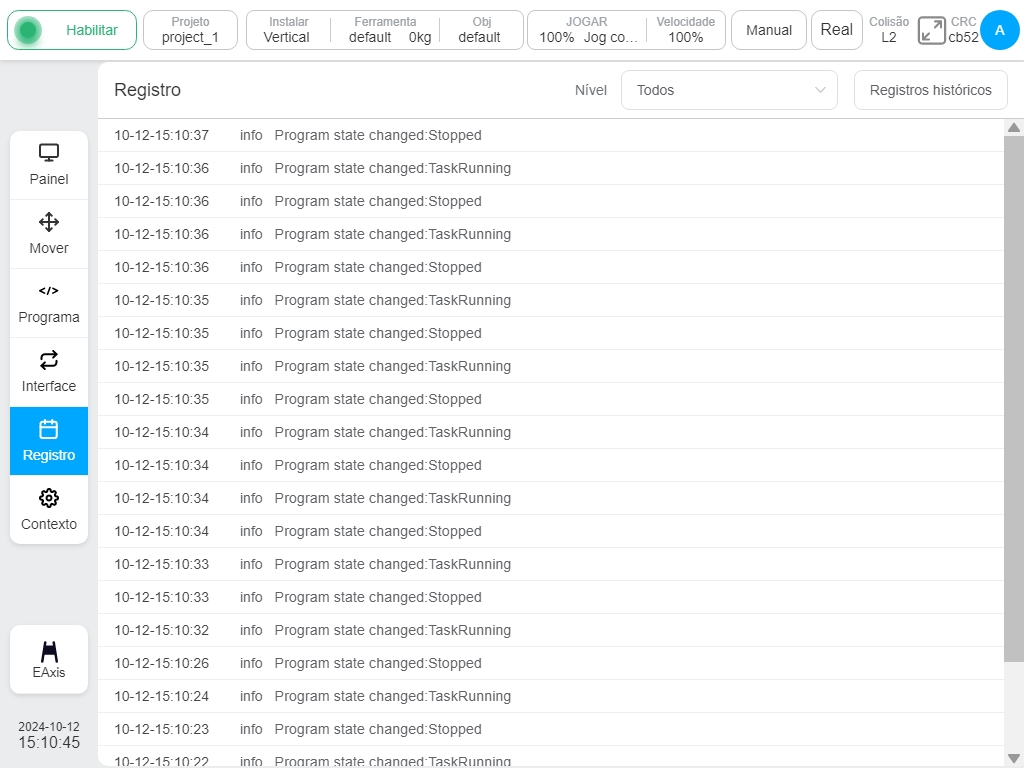
A página de registo apresenta informações de registo do sistema a partir deste arranque.
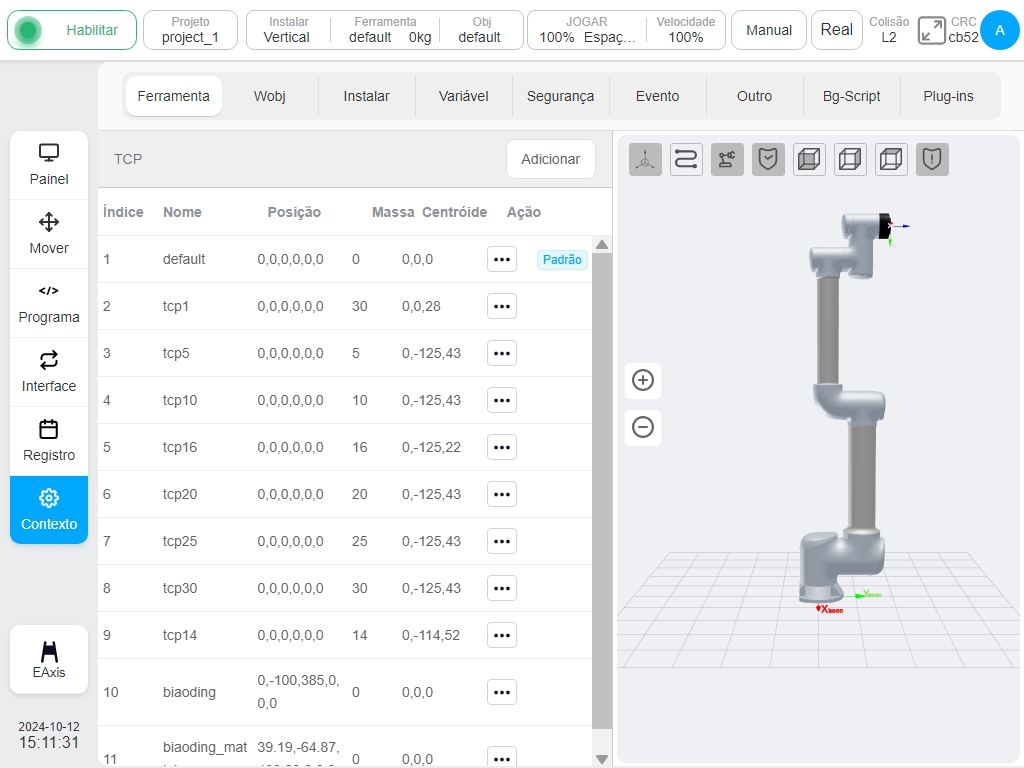
A página de definições contém as definições de configuração do projeto atual, incluindo as definições do sistema de coordenadas, as definições da direção de instalação e as definições de segurança.
Ligação multi-terminal#
O sistema suporta a ligação de vários terminais ao mesmo tempo, mas apenas um terminal tem o controlo e pode executar todas as funções, como a operação do programa e a configuração do sistema. Os outros terminais apenas têm a permissão de olhar e não podem aceder para executar o robô ou modificar as definições. O terminal sem permissão de controlo é apresentado da seguinte forma:
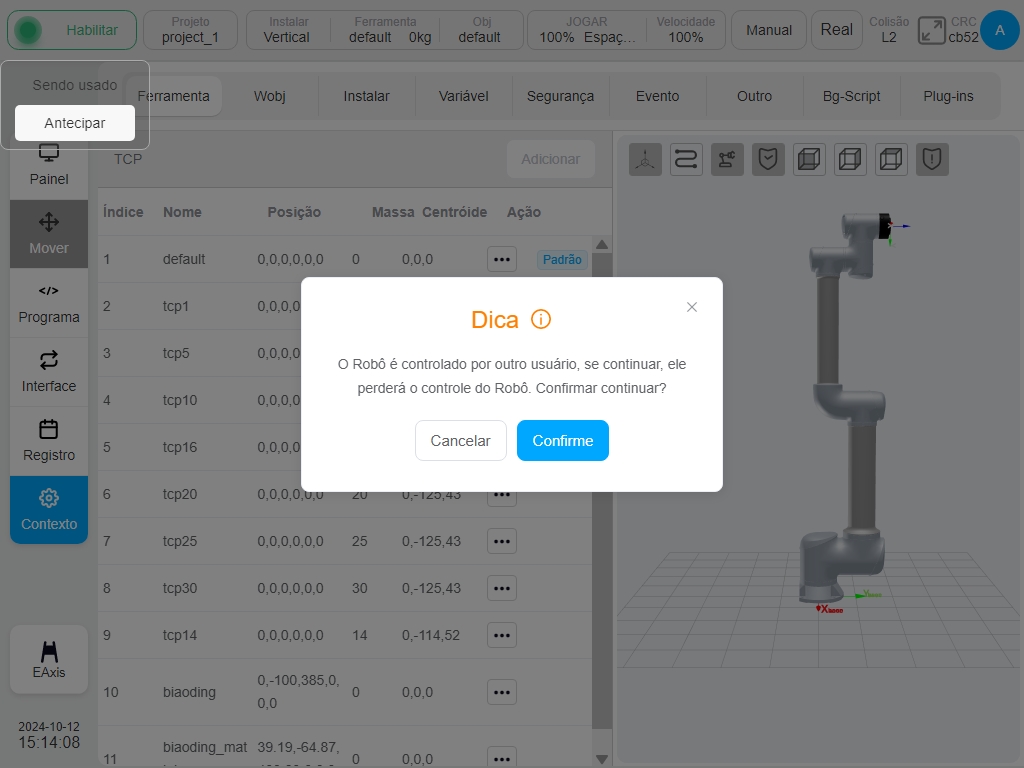
Quando outros terminais pretenderem obter o controlo, clique no botão «Obter controlo» no canto superior esquerdo para pedir autorização. Aparecendo a seguinte caixa de diálogo, clique no botão «OK» para obter o controlo do sistema e, em seguida, o controlo do terminal anterior será perdido.
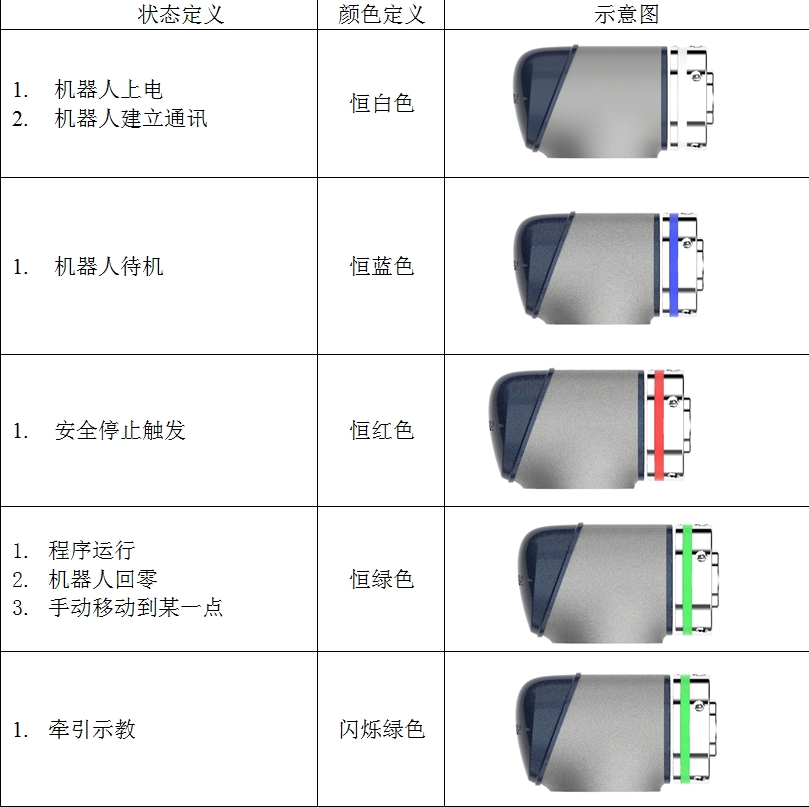
Luz final com indicador#