码垛工艺包简介#
码垛工艺包为码垛应用的插件扩展方案,包含多可机器人,BoxPallet插件包等。本手册将提供有关如何配置和搭建码垛应用。码垛工艺包分为两大部分,工艺流程的设置与码垛指令生成。功能亮点包括:
可自定义上料点、中间避障路点
提供栈板坐标系、工具偏移等参数的交互标定流程
友好的交互式A/B双垛型配置工具
机器人路径可达性检查功能
机器人脚本一键生成功能
工艺包安装与卸载#
码垛工艺包文件为“BoxPallet-1.0.0.plugin”的插件。安装步骤如下所示:
1、将焊接工艺包放入U盘,U盘要求格式为FAT32
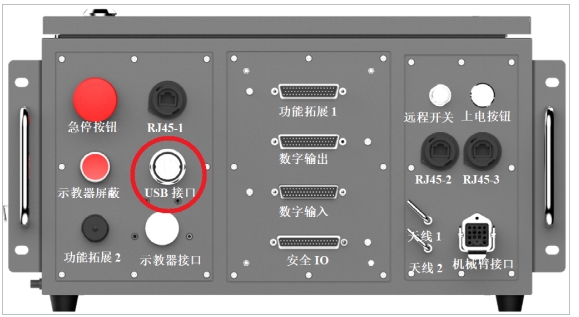
2、机器人系统启动后,在机器人控制柜上,USB接口处插入U盘。
3、使用admin账户登录机器人系统。
4、点击用户头像

,选择系统设置,如图1所示。
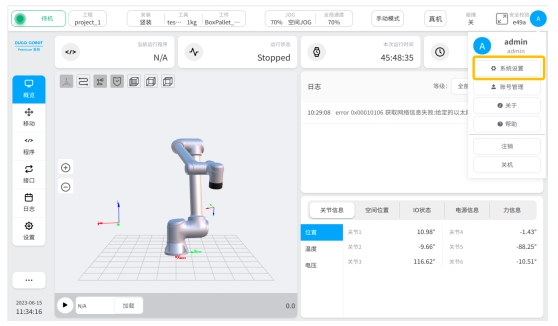
图1
5、选择插件管理功能,并点击“添加”按钮。
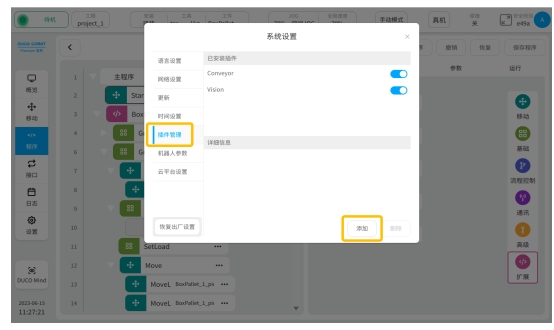
图2
6、选择U盘并从文件列表中,找到并选择“BoxPallet-1.0.0.plugin”插件包,如图3所示。
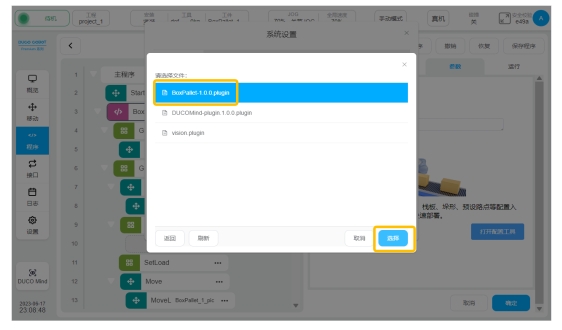
图3
7、插件包安装完成后,如图4所示,将在标注处显示插件包安装完成。在标注处,新安装的插件包将默认为使能。在标注处,将显示当前插件包的名称,版本信息等内容。
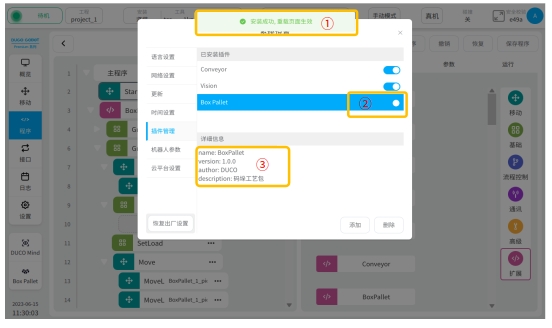
图4
8、码垛工艺包安装完成后,如图5所示,打开主页面选中“程序”,点击“新建程序”按钮。
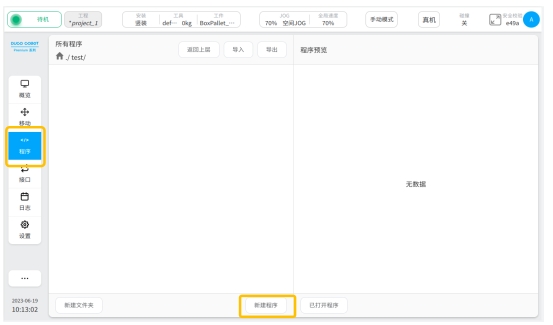
图5
9、输入程序的名称,点击“OK”按钮(如图6所示),进入脚本设置界面(如图7所示)。
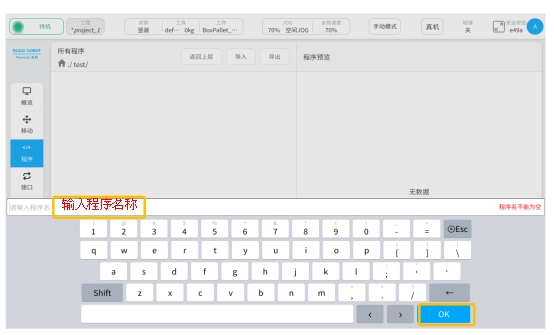
图6
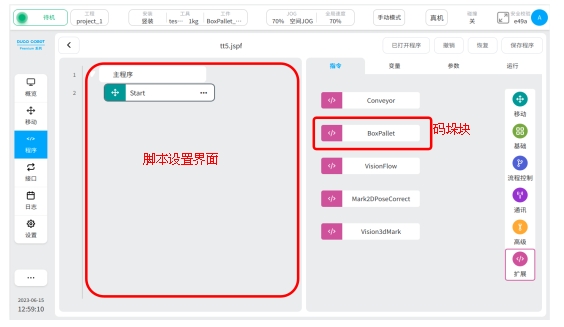
图7
10、已安装好的码垛工艺包,如下图 8所示,可以通过关闭使能信号的方式,暂时失效。或者点击删除按钮,将工艺包彻底删除。

图8