安全设置#
本小节介绍如何查看安全配置,更改应用安全配置。目前存在两种型号的安全控制器,DucoSafetyV1.0适配DC30控制柜。 DucoSafetyV2.0适配DC00 / DC15S/ DC30D控制柜。
DucoSafety V1.0#
查看安全配置#
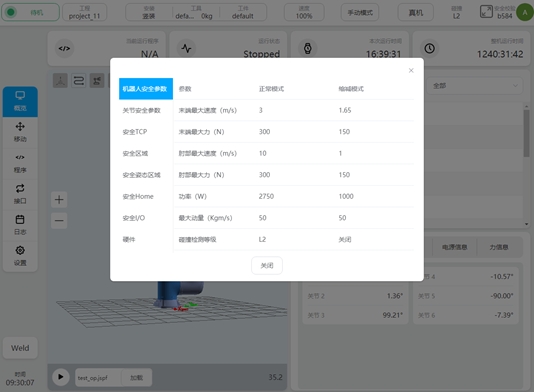
点击上方状态栏上的“安全校验”,弹出如下对话框,可查看当前激活的安全配置参数。
或者在设置页面——安全设置中也可以查看安全配置参数

安全配置更改应用#
更改安全配置前必须使用密码解锁。进入设置页面——安全配置,点击左下方的“解锁”按钮,仅在机器人断电的情况下可以解锁,输入密码(当前登陆用户的登陆密码),验证通过后进入安全参数配置模式。此时状态栏上的状态显示区显示为“安全参数配置”。
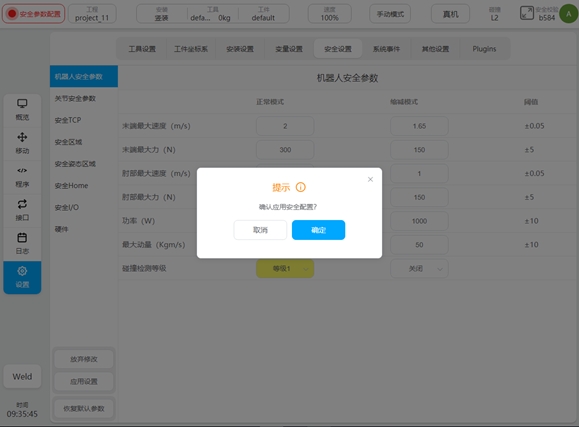
更改配置时,本次的修改内容将标记为高亮黄色显示出来。所做的所有更改只有在点击“应用设置”按钮时才会生效。点击“恢复默认设置”,将会将所有的安全参数恢复到默认的出厂设置值。点击“应用设置”按钮后,会弹出提示框,如图所示。
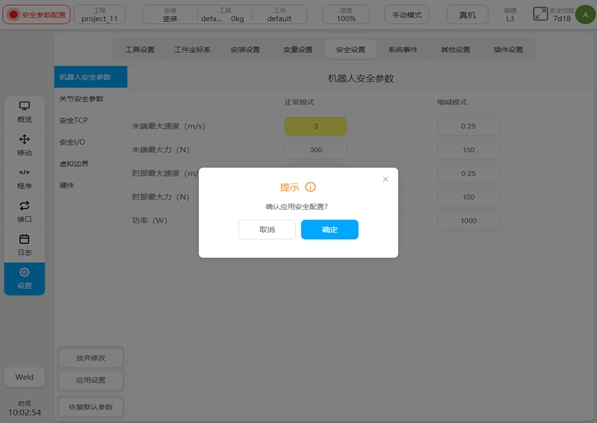
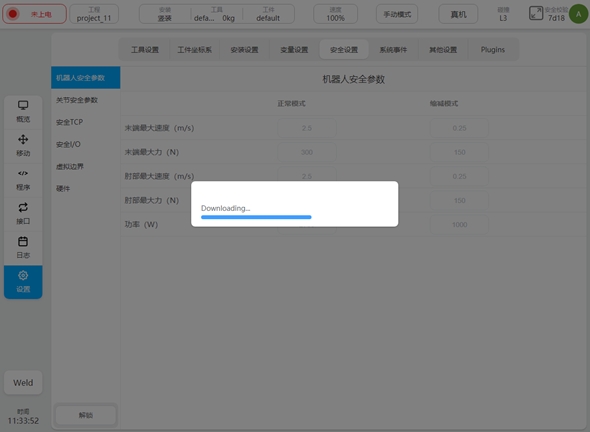
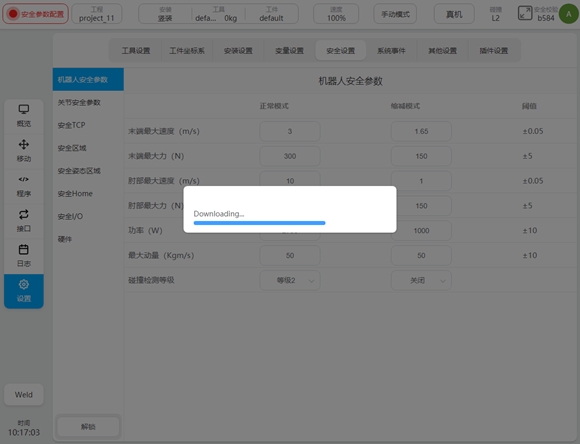
单击“确认”按钮后,会显示加载安全参数过程的提示框,如图所示。
安全参数配置完成后,系统会将配置的安全参数再次以弹出窗口的方式显示,供用户进行检查。如下图,检查确认无误后。点击“确定”按钮进行安全参数的配置。配置成功后,状态栏上方的安全校验将发生更改。

安全参数说明#
本小节将介绍机器人的各项安全配置参数。
安全模式#
正常模式:默认激活的安全模式
缩减模式:可以使用安全输入IO激活此模式
恢复模式:当机器人的实际运动参数超出安全限制范围,导致机器人停机,此时恢复模式将激活,用户可以将机器人移动到安全限制范围内
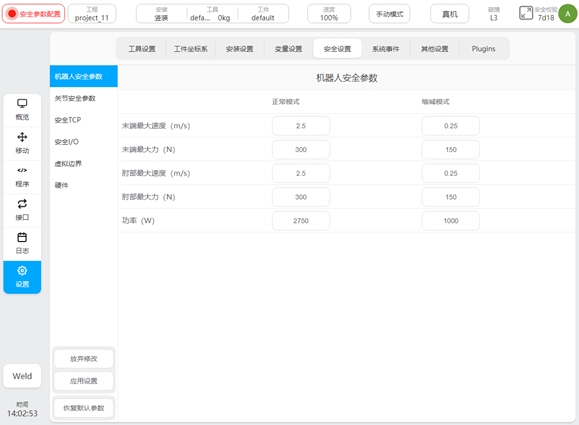
机器人安全参数#
机器人参数用来限制一般的机器人运动。可以配置其在正常模式和缩减模式下的参数值。
末端最大速度 限制机器人末端的最大速度
末端最大力 限制机器人末端最外部施加的最大力
肘部最大速度 限制机器人肘部的最大速度
肘部最大力 限制机器人肘部对外部施加的最大力
功率 限制机器人对外部做的最大的机械功

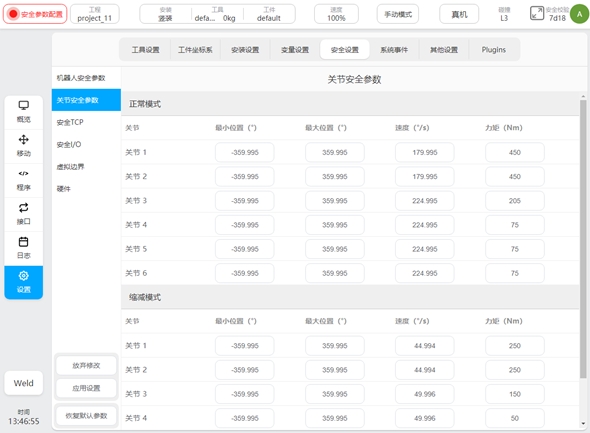
关节安全参数#
关节参数限制用来限制机器人的每个关节的位置范围、最大速度、最大力矩。可以配置其在正常模式和缩减模式下的参数值
位置范围:定义各个关节的最小位置和最大位置。
最大速度:定义各个关节的最大角速度。
最大力矩:定义各个关节最大的力矩
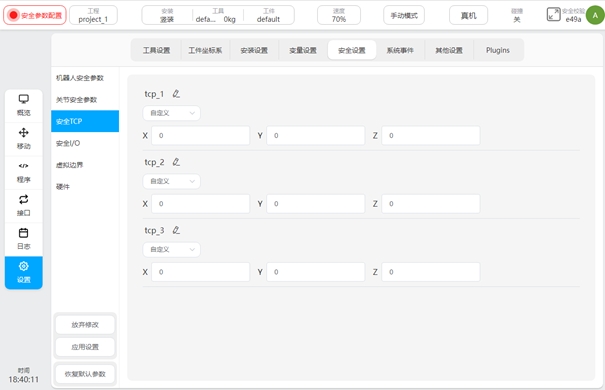
安全TCP#
安全系统可定义三组TCP偏移量,配置后,机器人将以这三组TCP来做速度监控和位置监控。任意一个TCP位置、速度超过安全设置,均会触发安全违例。
速度监控即“机器人安全参数”中的工具最大速度。位置监控即“虚拟边界”。在下拉框中可以选择现有的TCP或者自定义直接设定XYZ的值,当选择现有TCP时,更改X、Y、Z输入字段中的值时,下拉菜单中的TCP名称将变为自定义,表明是新定义的TCP。
更改系统中的TCP设置信息,不会影响已经配置好的安全参数。
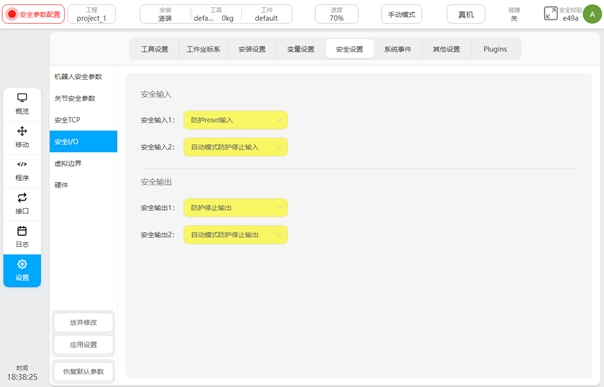
安全IO#
安全IO模块上包含两路可配置安全输入端口和两路可配置安全输出端口。
安全输入功能包含:
防护reset输入: 当防护停止发生时,触发该端口,机器人恢复正常状态
自动模式防护停止输入:配置后,机器人在自动模式下触发该端口时,机器人执行防护性停止。
自动模式防护reset输入:当自动模式防护停止发生后,触发该端口,机器人恢复正常状态
Reduce模式输入:配置后,触发该端口,机器人将过渡到缩减模式。机器人将减速以使参数限制符合缩减模式下的安全参数限制.
安全输出功能包含:
防护停止输出:当机器人处于防护停止状态时,触发该端口
自动模式防护停止输出:当机器人处于自动模式防护停止时,触发该端口
Reduce模式输出:当机器人处于缩减模式时,触发该端口.
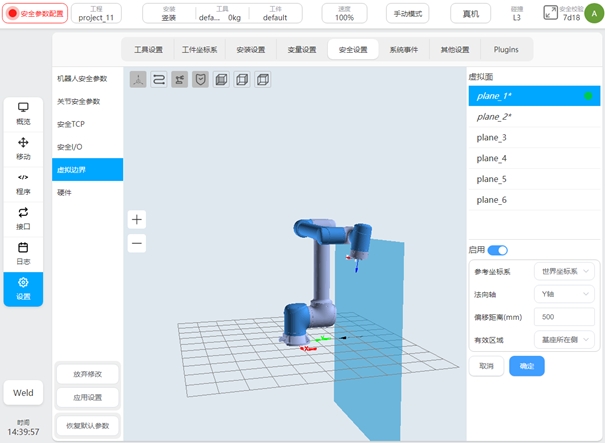
虚拟边界#
虚拟边界可用来限制机器人的工作空间。可定义六个虚拟边界来限制机器人的工具和肘部。当机器人的工具和肘部触碰到虚拟边界时,机器人将执行防护性停止。
界面上右侧绿色指示灯表示该平面被激活,同时3D图显上可以显示激活的虚拟边界的位置和虚拟边界的有效区域。选中一个平面,3D图显上对应的平面将高亮显示。
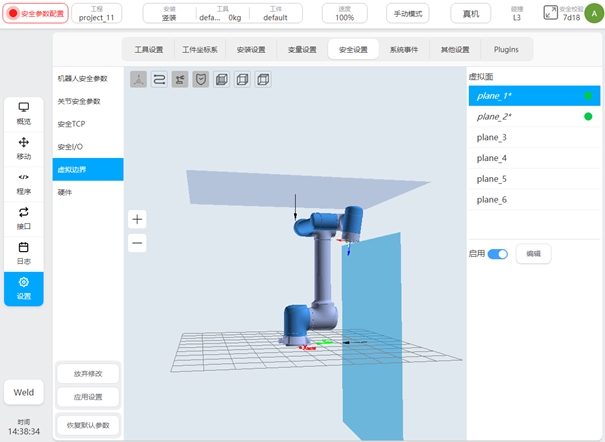
虚拟边界通过以下方式定义:
选择一个参考坐标系,可以是世界坐标系、基座坐标系或者设置中定义的工件坐标系;选择参考坐标系的一个坐标轴(X、Y、Z)作为虚拟平面的法向轴,设定沿着该坐标轴的偏移距离,偏移距离为正值时表示沿着坐标轴正向偏移,为负值时表示沿着坐标轴负向偏移。如此则确定了一个平面,然后选择机械臂的有效活动区域是在平面的那一侧。例如选择参考坐标系为基座坐标系,选择Z轴为法向轴,偏移距离设定为600mm,则虚拟平面为基座坐标系XoY平面向Z轴正向偏移600mm形成。
下图为相应的交互,选中一个平面,点击“启用”、“编辑”按钮,选择参考坐标系、法向轴、输入偏移距离、选择有效区域。点击“确定”按钮即可定义该虚拟边界,虚拟平面上显示的箭头表示机械臂的活动区域。
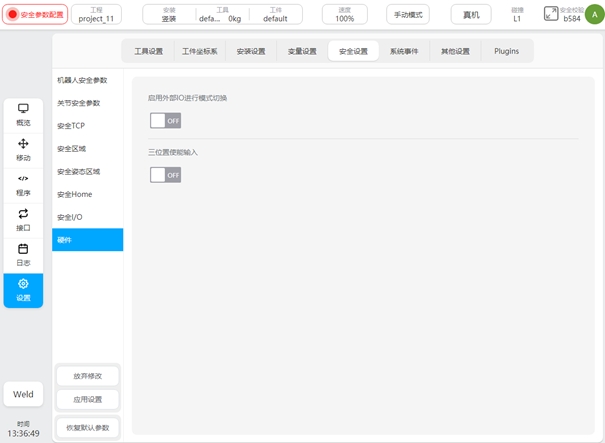
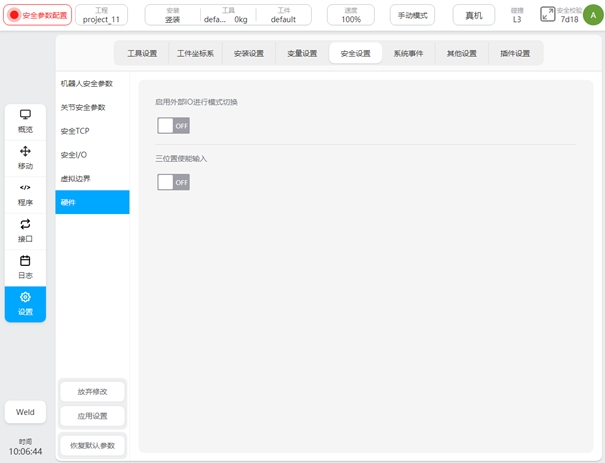
硬件#
包含启用外部IO进行模式切换和三位置使能输入
启用外部IO进行模式切换:启用此项,可以通过外部IO进行手自动模式的切换,此时界面状态栏上的模式切换功能无效。
三位置使能输入:启用此项,当机器人处于手动模式下,仅当示教器上的三位置开关处于中间位置才可以移动机器人,机器人在移动过程中任意时刻三位置开关处于非中间位置时都会触发机器人的暂停。
DucoSafety V2.0#
查看安全配置#
点击上方状态栏上的“安全校验”,弹出如下对话框,可查看当前激活的安全配置参数。
或者在设置页面——安全设置中也可以查看安全配置参数
安全配置更改应用#
更改安全配置前必须使用密码解锁。进入设置页面——安全配置,点击左下方的“解锁”按钮,仅在机器人断电的情况下可以解锁,输入密码(当前登陆用户的登陆密码),验证通过后进入安全参数配置模式。此时状态栏上的状态显示区显示为“安全参数配置”。
单击“确认”按钮后,会显示加载安全参数过程的提示框,如图所示。
安全参数配置完成后,系统会将配置的安全参数再次以弹出窗口的方式显示,供用户进行检查。如下图,检查确认无误后。点击“确定”按钮进行安全参数的配置。配置成功后,状态栏上方的安全校验将发生更改。

安全参数说明#
本小节将介绍机器人的各项安全配置参数。
安全模式#
正常模式:默认激活的安全模式
缩减模式:可以使用安全输入IO激活此模式
恢复模式:当机器人的实际运动参数超出安全限制范围,导致机器人停机,此时恢复模式将激活,用户可以将机器人移动到安全限制范围内
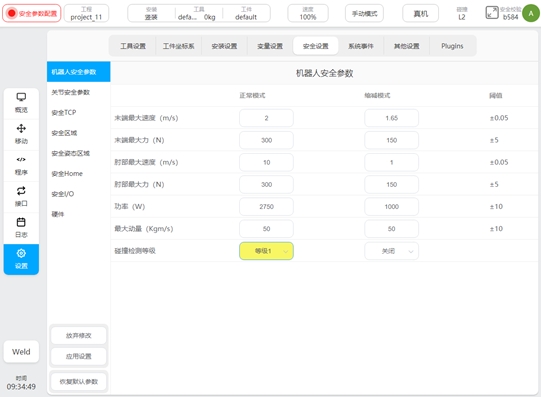
机器人安全参数#
机器人参数用来限制一般的机器人运动。可以配置其在正常模式和缩减模式下的参数值。
末端最大速度 限制机器人末端的最大速度
末端最大力 限制机器人末端最外部施加的最大力
肘部最大速度 限制机器人肘部的最大速度
肘部最大力 限制机器人肘部对外部施加的最大力
功率 限制机器人对外部做的最大的机械功,机器人末端负载视为机器人本体的一部分
最大动量 限制机器人对外输出最大动量,机器人末端负载视为机器人本体的一部分
碰撞检测等级 机器人检测与外界发生碰撞的灵敏度,等级越高灵敏度越高

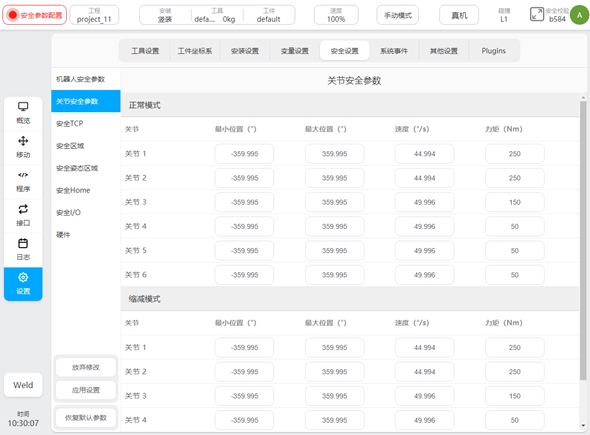
关节安全参数#
关节参数限制用来限制机器人的每个关节的位置范围、最大速度、最大力矩。可以配置其在正常模式和缩减模式下的参数值
位置范围:定义各个关节的最小位置和最大位置。
最大速度:定义各个关节的最大角速度。
最大力矩:定义各个关节最大的力矩
安全TCP及工具#
安全系统可定义三组TCP偏移量,配置后,机器人将以这三组TCP来做速度监控和位置监控。任意一个TCP位置、速度超过安全设置,均会触发安全违例。
速度监控即“机器人安全参数”中的机器人安全tcp球心在空间中的最大线速度,位置监控即“安全区域”。可以设置3个安全TCP,有两种定义TCP的方式,可以选择全局变量中定义的工具坐标系,也可以自定义输入坐标系的值。当使用预定义的工具坐标系时,选择工具坐标系,X、Y、Z输入框中显示工具坐标系的值。如果X、Y、Z的值被修改,则坐标系会变成自定义。如果全局变量中对应坐标系中的值被修改,和当前安全设置中用到的坐标系的值不一致,会在工具定义处显示”!”提醒图标。当选择自定义输入数据,直接编辑X、Y、Z、Rx、Ry、Rz的值以及包络球的球半径。
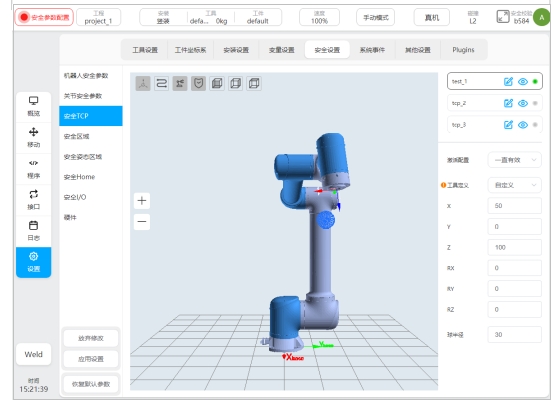
每个安全TCP可以设置:禁用、一直有效、自动模式有效、安全组合配置1、安全组合配置2,五种激活条件。当三个TCP均是禁用状态时,安全控制系统默认使用法兰坐标系,球半径50mm。在TCP配置列表上,显示对应TCP的配置状态,如果某TCP被禁用,则对应状态灰显。配置的安全TCP可以在3D显示区中显示坐标系以及包络球,且可以通过对应TCP名称后的  图标进行显示和隐藏的切换。点击TCP名称后的
图标进行显示和隐藏的切换。点击TCP名称后的  图标可以修改TCP默认名称。未被禁用的安全TCP会显示
图标可以修改TCP默认名称。未被禁用的安全TCP会显示  ,否则会显示
,否则会显示  。
。
安全区域#
安全区域定义类型包括平面、长方形、圆柱体三种形式。用户可以最多设置6个相互独立的空间区域。通过点击安全区域名称后的 图标可以对配置的安全区域在3D显示区中进行显示和隐藏的切换,且可以点击区域名称(如:默认名称zone_1)后的 图标修改安全区域名称。未被禁用的安全区域会显示 ,否则会显示 。
安全区域的激活配置有:禁用、一直有效、自动模式有效、安全组合配置1、安全组合配置2,共5种。
安全区域的边界响应是指机器人从外部进入安全区域及在内部运动超过边界的响应,共有2种响应模式,即:限制超出边界、进入区域触发reduce模式。当选择限制超出边界时,描述的时机器人在内部运动超过边界的响应;当选择触发reduce模式时,描述的是机器人从外部进入区域的响应,机器人从区域离开时恢复normal模式。
空间区域中还可以设置是否包含肘部限制,肘部的空间范围以球半径形式进行设置。
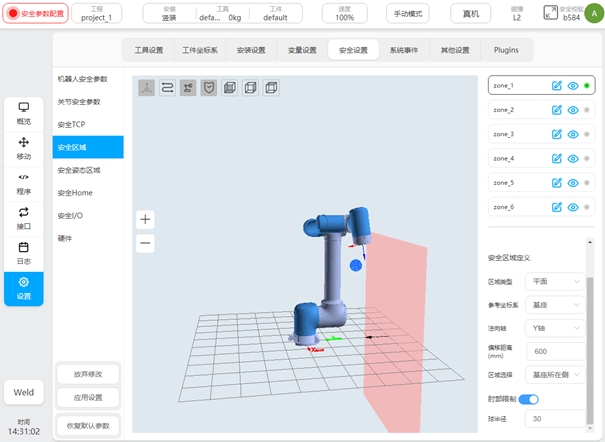
当配置区域类型为平面时,平面区域的参考基准是基于世界坐标系/基座/设定的工件坐标系,通过设定平面法向、法向偏移量从而确定平面。平面的设置可以通过“区域选择”配置生效区域,且对应的方向在3D区域中通过黑色箭头显示。
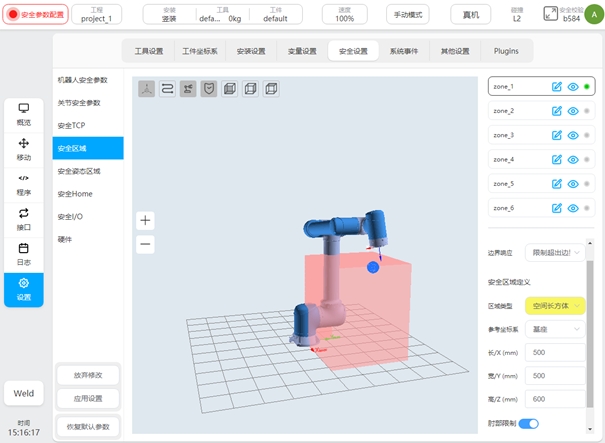
当配置区域类型为空间长方体时,长方体区域的设置基准是基于世界坐标系/基座/设定的工件坐标系,以工件坐标系作为长方体的一个角点,三个坐标轴方向分别对应长(X)、宽(Y)、高(Z)。长宽高的设置范围为-3000mm—3000mm。
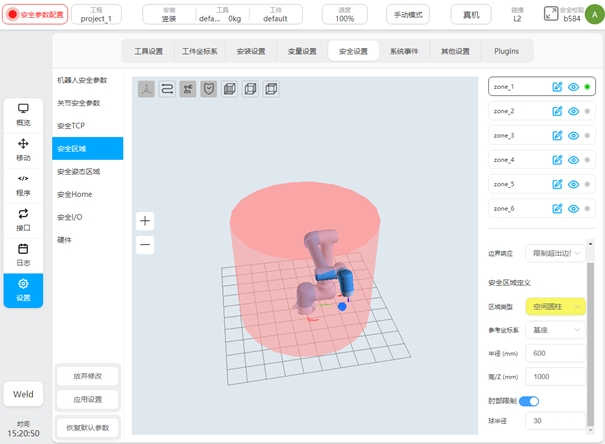
当配置区域类型为空间圆柱体时,其设置基准是基于世界坐标系/基座/设定的工件坐标系,以工件坐标系作为圆平面的圆心,Z方向指向高度方向,可以设置半径、高度。半径取值范围为0-3000mm,高度取值范围为-3000mm—3000mm。
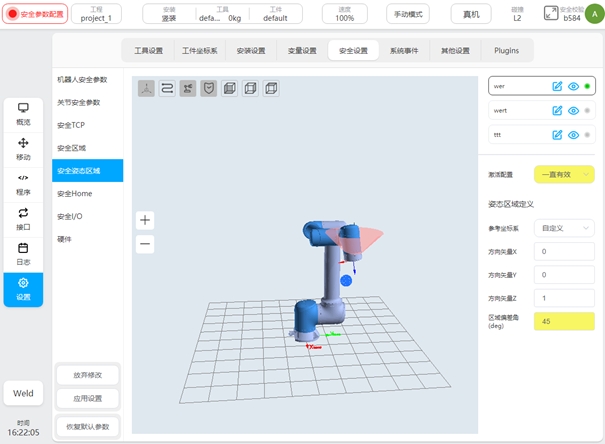
安全姿态区域#
安全姿态区域设置,姿态区域是指在机器人基坐标系下,围绕某个方向矢量,形成一个圆锥角。姿态限制只限制机器人TCP的Z轴在姿态区域范围内。用户最多可以设置三个姿态区域。通过点击姿态区域右侧名称后的 图标可以显示或隐藏单个姿态区域,默认为显示。且可以点击名称后的 图标修改姿态区域名称。未被禁用的姿态区域会显示 “,否则会显示 。
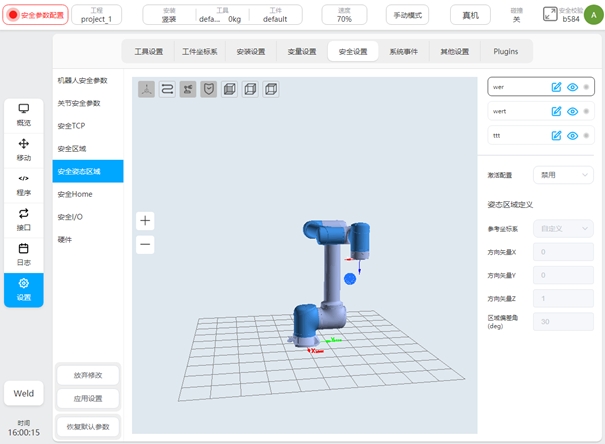
安全姿态区域的激活配置有:禁用、一直有效、自动模式有效、安全组合配置1、安全组合配置2,共5种方式。安全姿态区域不同于安全区域,只约束TCP的Z轴方向,仅有超出区域后触发防护性停止一种响应方式。
安全姿态区域定义的参考坐标系有3种方式:自定义、获取当前TCP姿态、通过预先定义的工件坐标系定义。当选择自定义时,手动修改方向矢量X、Y、Z的值,该值描述的是在机器人基坐标系下的值;当选择获取当前TCP姿态时,以当前TCP的Z轴方向作为姿态区域的基准方向,且将方向转换到机器人基坐标系下描述,显示到矢量方向X、矢量方向Y、矢量方向Z上, 若手动修改值后,会变成自定义方式.;当通过工件坐标系定义时,以工件坐标系Z轴方向作为姿态区域的基准方向,转换到机器人基坐标系下,同样地手动修改值后,会变成自定义方式。
如果在外部对工件坐标系方向做了修改,在参考坐标系处显示提醒  提醒图标。区域偏差角取值5-180度。例如:
提醒图标。区域偏差角取值5-180度。例如:
安全Home#
安全Home设置,安全Home监控将同步“其他设置”页面中的Home位置设置。如果安全Home设置中的位置和“其他设置”中的Home位置不一致,在“同步Home设置”处显示提醒 提醒图标。若不同步设置,系统的Home位置以安全设置中为准。移动界面中“按主归位”回Home点操作,及机器人其他端口(如2001端口)Home信号的输出,均以安全控制器的设置为准。“其他设置”页面中的Home点仅作为记录,不作为Home点判断依据。可设置Home点的监控阈值,范围1-5°。
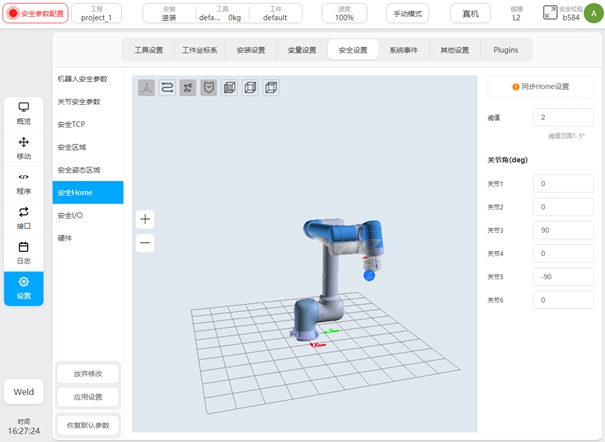
当选择同步Home位置后,显示Home位置的关节角度。且3D模型显示区机器人模型刷新到对应位置。
当设置了安全home位置,且在安全I/O中,配置了home位置输出(详见第6.2.3.8章节),则当机器人所有的关节角度,在所设定的home位置范围内(设定值-阈值,设定值+阈值),且速度接近于0°/s(为过滤正常的编码器跳动,系统预设关节速度小于2°/s), 且持续500毫秒(系统预定义且无法配置),由安全输出对外输出home位置到达信号。
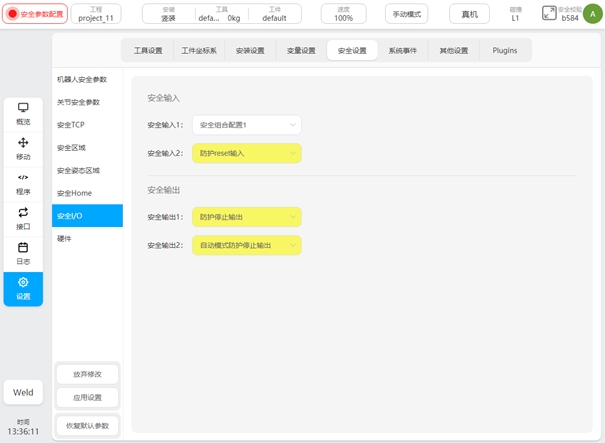
安全IO#
安全IO模块上包含两路可配置安全输入端口和两路可配置安全输出端口。
安全输入功能包含:
防护reset输入: 当防护停止发生时,触发该端口,机器人恢复正常状态
自动模式防护停止输入:配置后,机器人在自动模式下触发该端口时,机器人执行防护性停止。
自动模式防护reset输入:当自动模式防护停止发生后,触发该端口,机器人恢复正常状态
Reduce模式输入:配置后,触发该端口,机器人将过渡到缩减模式。机器人将减速以使参数限制符合缩减模式下的安全参数限制.
安全组合配置1 / 2:当安全组合配置1或者安全组合配置2端口被触发时,所有被配置属于安全组合配置1或者安全组合配置2的安全特征,包括安全工具、安全区域、安全姿态区域将会被激活并开始监控;
安全输出功能包含:
防护停止输出:当机器人处于防护停止状态时,触发该端口
自动模式防护停止输出:当机器人处于自动模式防护停止时,触发该端口
Reduce模式输出:当机器人处于缩减模式时,触发该端口.
HOME位置:当机器人处于安全HOME位置附近时,触发该端口;
硬件#
包含启用外部IO进行模式切换和三位置使能输入
启用外部IO进行模式切换:启用此项,可以通过外部IO进行手自动模式的切换,此时界面状态栏上的模式切换功能无效。
三位置使能输入:启用此项,当机器人处于手动模式下,仅当示教器上的三位置开关处于中间位置才可以移动机器人,机器人在移动过程中任意时刻三位置开关处于非中间位置时都会触发机器人的暂停。