安全維護#
手動松抱閘#
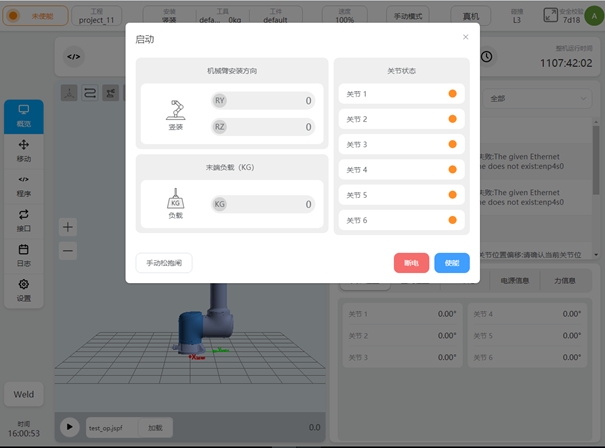
在某些情況下,使用者需要手動鬆開單一關節的抱閘。在機械手臂上電未使能的情況下,啟動頁面會出現手動鬆抱閘的入口,如圖
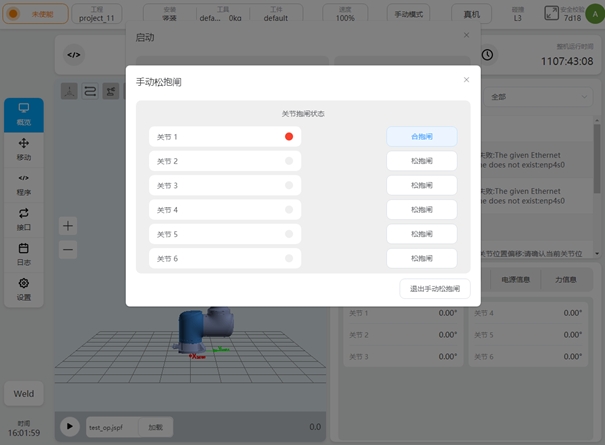
點選可進入手動松抱閘頁面,如圖。此頁左側顯示各關節的抱閘狀態,灰色表示抱閘閉合,紅色表示抱閘鬆開;右側為抱閘控制鈕,點選可控制抱閘的分合。
抱閘檢測#
用戶需按期進行抱閘檢測,以防止機械手臂因抱閘失效帶來風險。系統會週期性的提醒用戶需要進行抱閘偵測,出廠預設每隔30天提醒。
當距離上次抱閘偵測超過設定時間後,系統將會跳出如下對話框,提示使用者需要執行抱閘偵測。啟動頁面的抱閘偵測入口將顯示小紅點提示使用者。

在機械手臂啟用的情況下,啟動頁面會出現抱閘偵測功能的入口。點選可進入抱閘檢測頁面,如圖。此頁面可顯示抱閘偵測週期和距離上次抱閘偵測過去的天數。
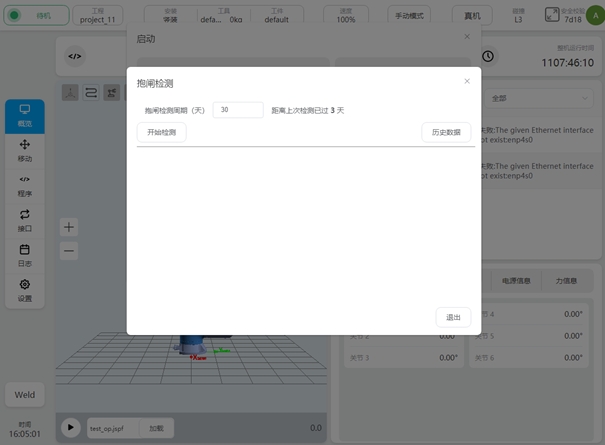
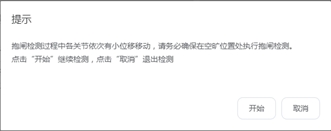
點擊“開始偵測”,彈出以下對話框,按照對話框提示進行操作。在檢測的過程中可以暫停、停止檢測過程。檢測完成後,顯示本次抱閘檢測的結果。

點選「歷史資料」可查看歷次抱閘偵測的時間及偵測結果。

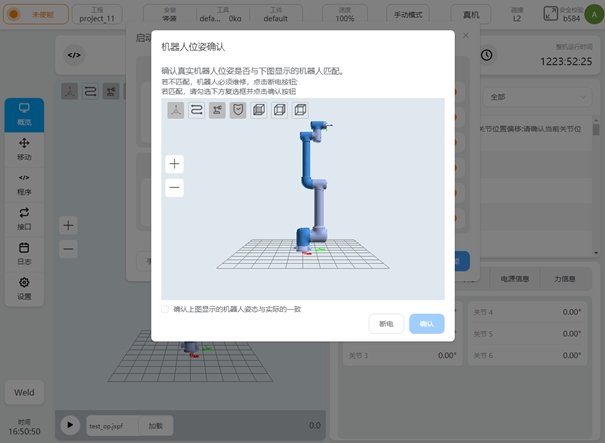
上電關節位置偵測#
機械手臂在上電時,會偵測關節是否在斷電狀態產生異常移動,以確保使用安全。
若係統偵測到至少一個機器人關節在下電狀態下產生過異常移動,會跳出下列對話方塊。使用者需要確認機器人實際位姿與介面3D模型是否一致,若一致,勾選“確認上圖顯示的機器人姿態與實際的一致”,點擊“確認”按鈕繼續上電操作即可;若不一致,點選“斷電”按鈕斷開機械手臂動力電並聯絡維修人員。