


系統設定#
系統設定主要包括網路和語言的設置,以及系統、安全控制器韌體的版本更新、時間設定、插件管理、機器人參數(設定檔的導入/匯出)、雲端平台設定以及恢復出廠設定。點選狀態列最右邊的使用者頭像,選擇 “系統設定”按鈕,會顯示系統設定頁面。頁面左側是導覽選項卡,右側是對應選項卡顯示內容區。
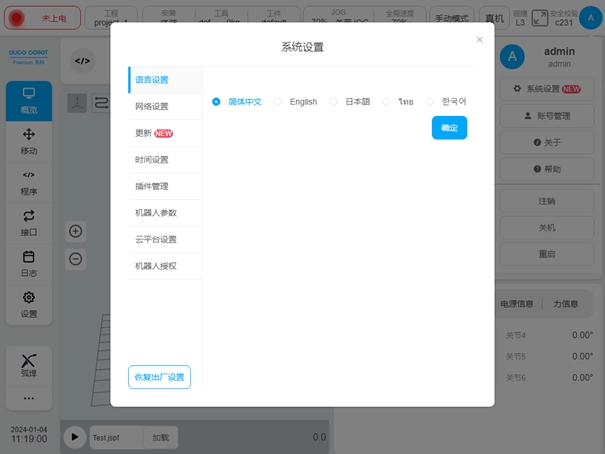
語言設定#
在語言設定中可以進行語言切換,選擇需要設定的語言,點選「確定」按鈕,語言設定成功。
網路設定#
點選「網路設定」標籤,會顯示網路設定相關內容,可以進行IP設定和WLAN設定。其中,網路IP設定根據不同的硬體平台,顯示不同數量的網路連接埠配置訊息,以方便使用者修改不同連接埠的IP位址。顯示的IP詳細資訊包括是否啟動DHCP、IP位址和子網路遮罩;IP設定可選擇DHCP或靜態IP設定。

當選擇DHCP時,IP位址、子網路遮罩和預設閘道都是由DHCP伺服器自動分配的,使用者不能進行手動輸入,選擇後點選「設定」按鈕即可。當選擇靜態IP設定時,使用者需要手動輸入IP位址、子網路遮罩和預設網關,再點選「設定」按鈕即可。
备注
當控制櫃存在多個物理網口時,介面設置中的TCP/IP伺服器的IP地址,對應LAN1的IP位址。
設定WLAN時,輸入網路名稱和密碼,點選「設定」按鈕後重新啟動即可生效。

更新#
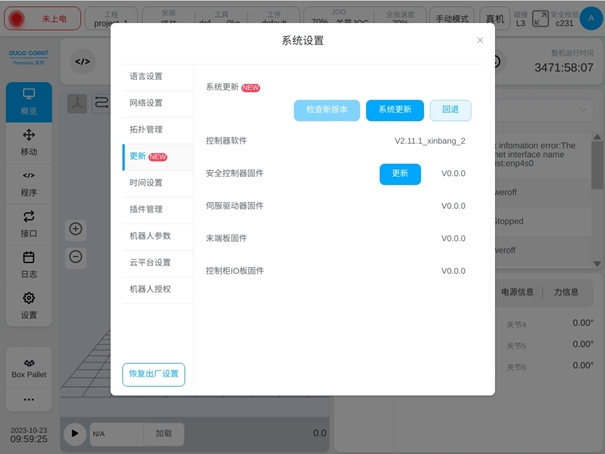
點選「更新」標籤,會顯示系統更新相關操作按鈕,即「檢查新版本」、「系統更新」、「回退」按鈕,、及控制器軟體版本、安全控制器韌體版本、伺服控制器韌體版本、末端板韌體版本、控制櫃IO板韌體版本。其中,安全控制器韌體版本有單獨「更新」按鈕進行更新,系統更新可主動檢查系統版本或本機系統一鍵更新至某個版本,也可回退到先前的某個版本。
機器人進行系統更新和安全控制器韌體版本時,需確保機器人處於斷電狀態。
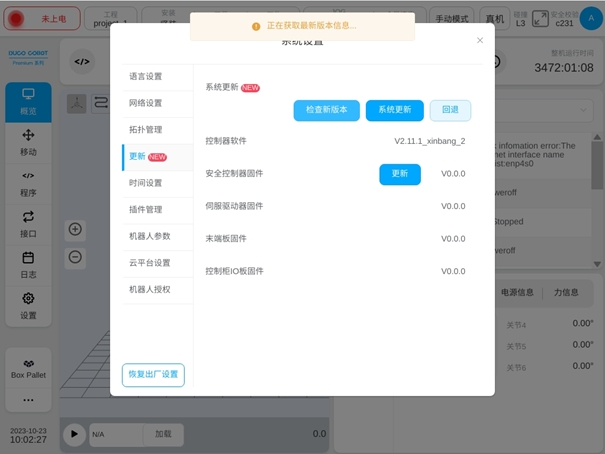
點選「檢查新版本」按鈕後,介面上方會顯示「正在取得最新版本資訊…」提示語的彈框。
當檢查無軟體新版本時,介面會顯示提示目前軟體版本已是最新版本的彈框;當檢查有新版本時,介面會顯示最新版本的提示框。若要更新至新版本,請按一下「立即更新」即可。
點選「系統更新」按鈕,會彈出「更新過程中機器人會自動上下電,請勿操作機器人!」的提示框,使用者點選提示框「確定」按鈕後,會顯示U盤選擇的彈跳窗。
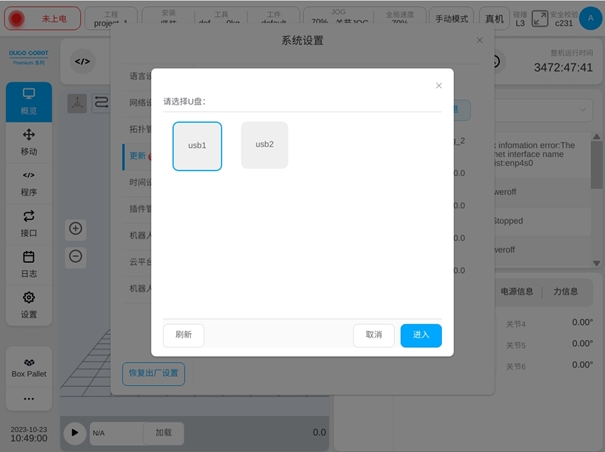
選擇好U盤後,按一下「選擇」按鈕,會顯示出該USB磁碟下所有符合對應類型更新的更新包,如係統更新包是以.updatePro後綴結尾,其中包括了軟體更新包(以.update字尾結尾),伺服韌體包,末端韌體更新包,IO板通訊包(.firmware)。軟體更新包是以.update後綴結尾。安全控制器更新包是以.firmware後綴結尾。
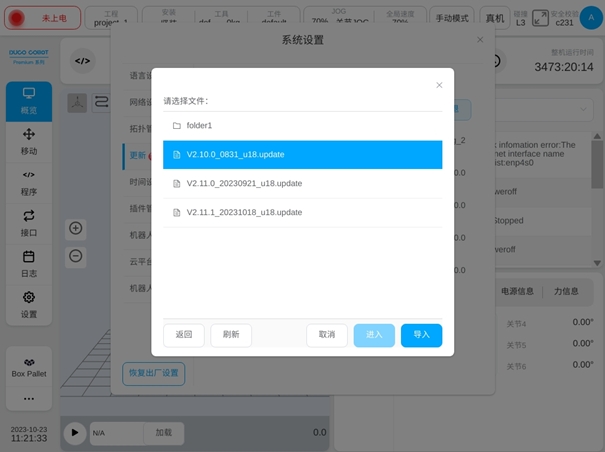
點選 「回退」按鈕,可以進行機器人系統版本回退操作,會顯示系統回退檔案清單介面。系統版本回退檔案是以.updatePro後綴結尾的。若只需要回退軟體版本,則選擇軟體回退文件,以.update後綴結尾。選擇所需檔案點選「回退」按鈕會提示重新啟動後生效。機器人進行系統版本回退時,需確保機器人處於斷電狀態。
除了使用者可主動查詢軟體版本,雲端可推送新版本到裝置。若雲端推送新版本,點選使用者頭像後彈出框裡「系統設定」按鈕旁會顯示字樣「NEW」的紅色標記。
時間設定#
按一下「時間設定」選項卡,會顯示目前系統的日期和時間。點選日期選擇器或時間選擇器的選擇框,分別可以進行日期和時間的選擇,如下圖所示:
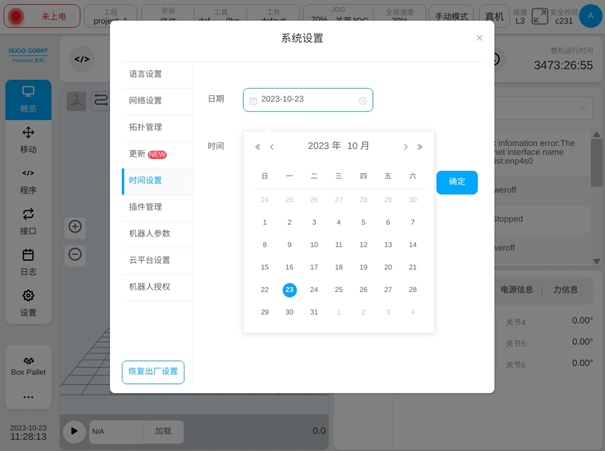

設定好日期和時間後,點選「確定」按鈕,即可設定成功。
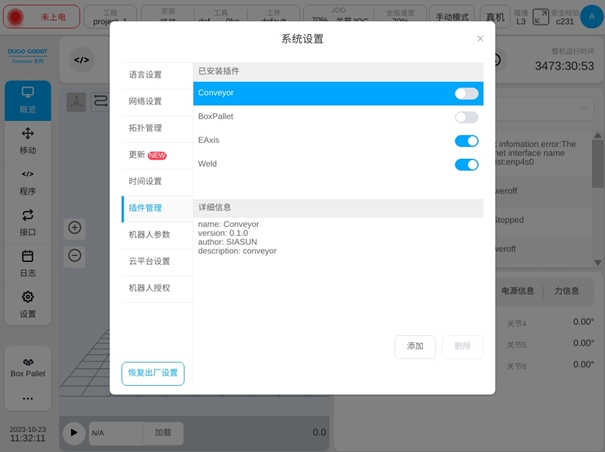
外掛管理#
.按一下「外掛程式管理」標籤,會顯示已安裝外掛程式和對應外掛程式的詳細資訊。如下圖:
機器人參數#
點選「機器人參數」標籤,可進行機械手臂設定檔的匯入和匯出,以及控制櫃參數同步到末端板的操作,如下圖:
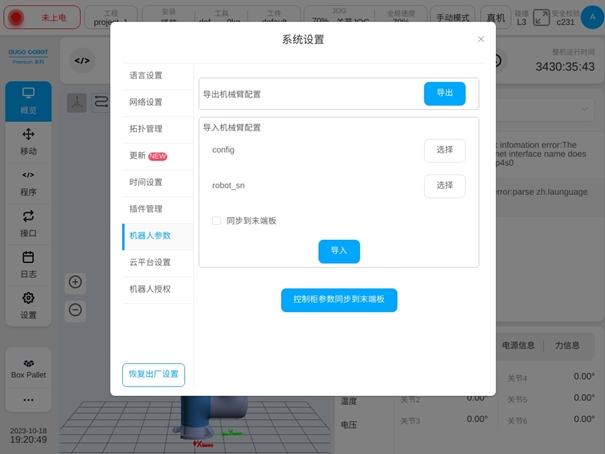
點選「匯出」按鈕,彈出外部U盤匯出檔案對話框,如下圖:
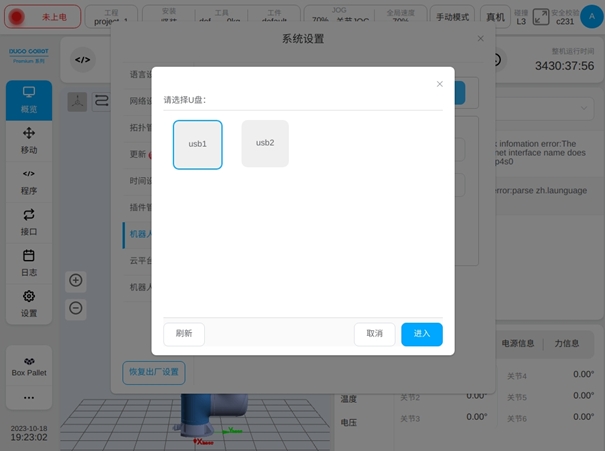
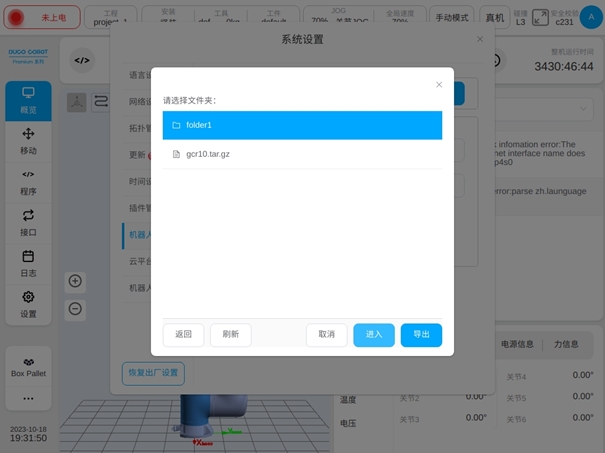
選擇好U盤(如:選擇U盤disk1)及對應U盤下檔案存放位置(如:選擇U盤下disk11資料夾),點選對話方塊右下角「選擇」按鈕即可。
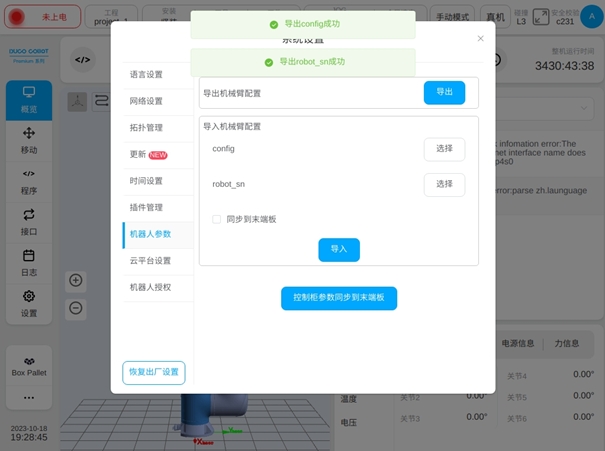
匯出成功後,介面上方會依序彈出「匯出config成功」和「匯出robot_sn成功」提示語。
此時,查看剛才所選擇U盤對應資料夾路徑下,會有以機械手臂型號命名的.tar.gz後綴檔案(如:gcr5.tar.gz)和robot_sn.json檔案。
分別點選匯入機械手臂設定部分裡config和robot_sn後「選擇」按鈕,從彈出的外部USB匯入檔案對話方塊分別選擇好所需config檔和robot_sn文件,對應config和robot_sn後會顯示綠色對號圖標,如下圖:

選擇好導入的機械手臂設定檔後,點選介面「導入」按鈕即可。導入成功後,介面上方會顯示「導入成功,斷電重啟後生效」提示語,如下圖:

點選「控制櫃參數同步到末端板」按鈕,可以將控制櫃內的機器人參數,同步到機器人的末端板中。
备注
整個機器人系統中有兩處存放機械臂的參數檔,一處在機器人控制櫃內,是當前生效的機械臂意數; 一處在機械臂末端板內,作為機械臂參數備份。
機器人系統上電時,將校驗這兩份參數的一致性,只有當兩份參數檔一致,才允許正常使能機械臂。 若不一致,則需要同步參數。
通常認為機械臂末端板內的參數是本機械臂絕對正確的參數。 若由於某些原因需要修改該參數檔,則需要按上述步驟,先將改動後的機械臂參數檔“config”與“robot_sn”導入到控制櫃內,再通過“控制櫃參數同步到末端板”功能,將參數同步到機械臂末端板。
雲端平台設定#
點選「雲端平台設定」標籤,會顯示機器人與雲端平台連線狀態,可進行雲端平台IP位址輸入,以及是否與雲端平台連線設定。如下圖:

當使用者手動輸入雲端平台伺服器IP位址後,切換「是否連接」開關,即可主動連線或中斷與雲端伺服器的連接,且連線狀態會對應改變。
機器人授權#
點擊「機器人授權」選項卡,會顯示機器人授權有關資訊和操作按鈕,點擊「產生動態碼」按鈕,會產生動態碼,並提示使用者「請將該動態碼傳送給經銷商,以取得授權文件,並在有效時間內啟動」顯示如下圖:

透過動態碼從經銷商取得授權檔案後,點選「匯入授權檔案」按鈕,將其匯入啟動即可。
恢復出廠設定#
點選系統設定頁面左側導覽標籤下方的「恢復原廠設定」按鈕(僅限admin權限使用者),彈出警告方塊如下圖:
點選「取消」按鈕,即取消恢復原廠設定;點選「確定」按鈕後,介面上方會顯示「 恢復原廠設定成功,需重新啟動生效!」彈框。恢復出廠設定後,會清空以下內容:project中所有非template工程、所有logs日誌、robot_sn檔案以及系統檔案下的project和預設的IP位址。
警告
在使用該功能時,需謹慎操作,以免造成重要數據的丟失!