System Overview#
Project Management#
The system supports multi-project management while the project data includes robot program, project global variables, project settings and other information. When the system starts loading, the current project data is loaded according to the system settings. Other project data cannot be used in the current project.
User Management#
The system supports multi-user management. The user permissions are defined as: operator, programmer, maintainer, and admin. Specific permissions are described as follows:
User Permissions Level |
Permission Specification |
|---|---|
Operator |
Allows selection of project, running program, manually jog program, viewing robot status, etc |
Programmer |
Operator user permissions Programming robot program, project configuration The default user name is default and the initial password is 123 |
Maintainer |
Operator user permissions System update |
Admin |
Maintainer user permissions User Management The user name is admin and the initial password is 123 |
User Page Overview#
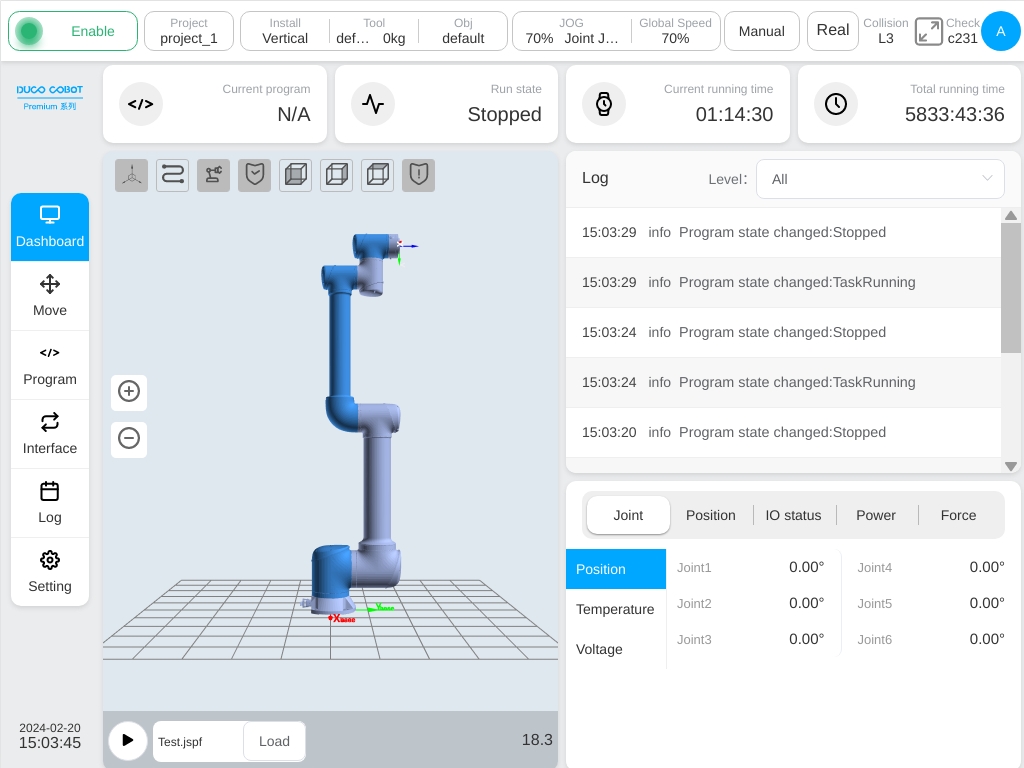
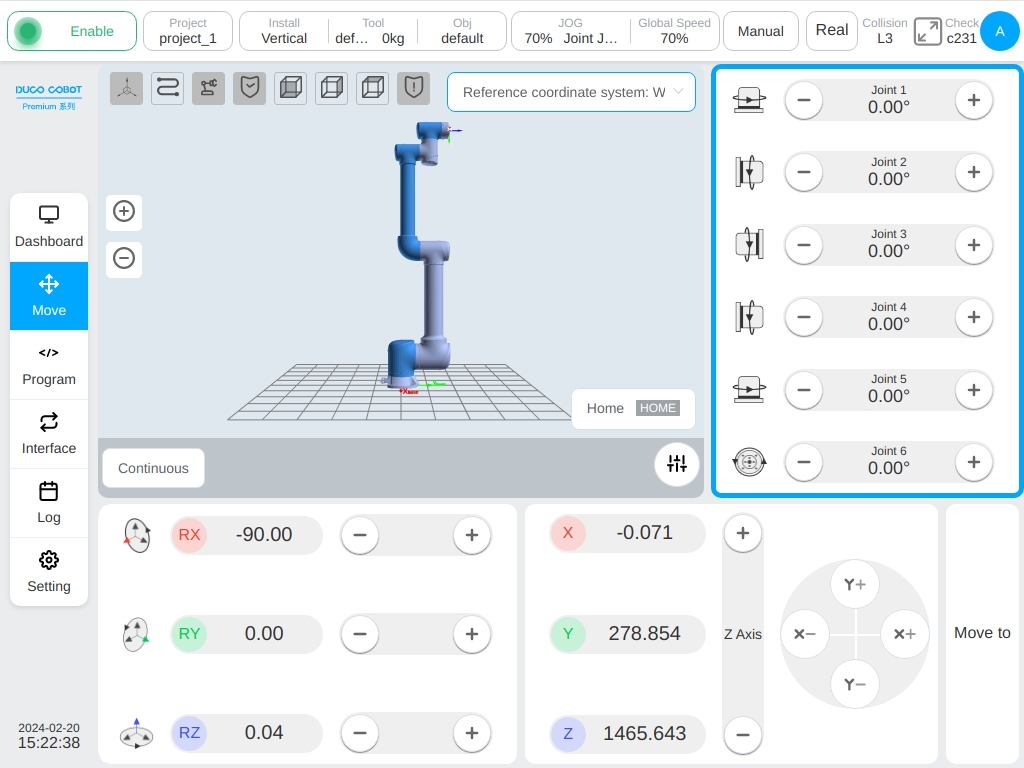
As shown in the figure, the overall interface is mainly divided into three parts: the head status bar, the left navigation bar, and the right content area. The content area presents different contents (sub-pages) based on the different selection of the left navigation bar. Below the navigation bar is the plug-in entry and system date and time.
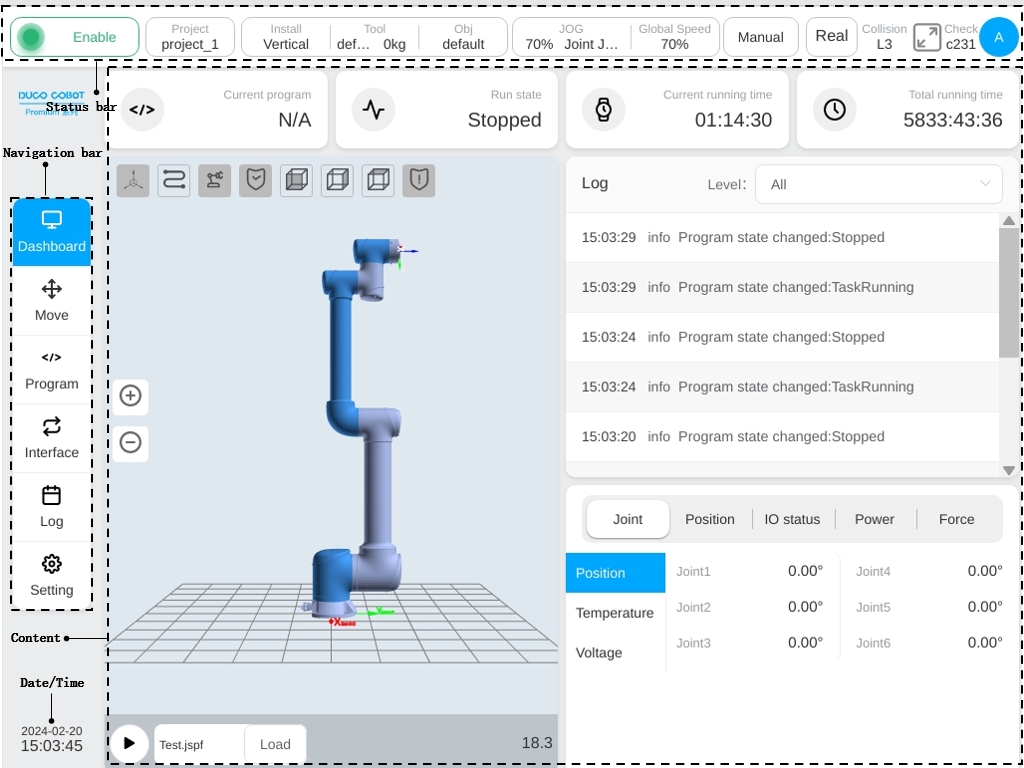
The main information displayed in the status bar includes: robot joint status indicator light, status display, current project, robot installation direction, information about the current tool coordinate system and workpiece coordinate system, speed percentage, operation mode, collision detection setting information, safety check code, and user information.
The navigation bar contains six ICONS: Dashboard, Move, Program, Interface, Log and Setting. Clicking the icon of the navigation bar to switch the content displayed in the content area. The main contents of each page are described as follows:
The overview page is a production view page that allows to select programs to run, and displays basic information such as program status, system running time, system logs and joint positions.
The move interface allows the user to manually operate the robot, set the coordinate system as well as the movement mode of manual movement.
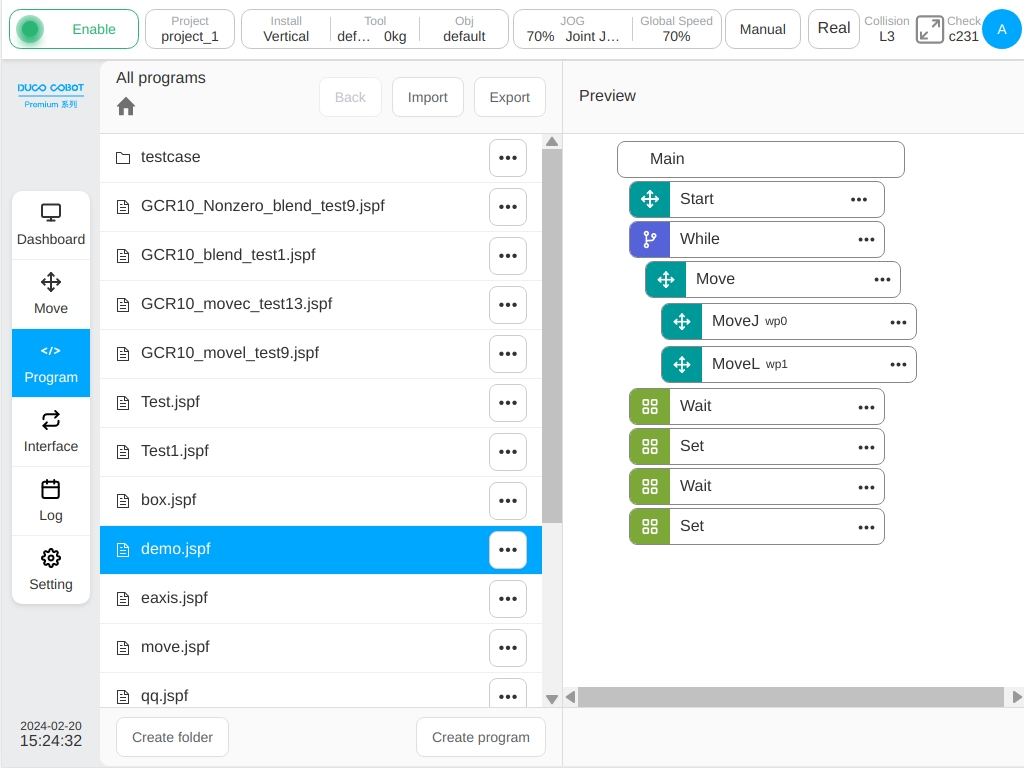
The program interface is the main programming page of the robot, where the user can manage the program files in the project as well as write the robot tasks through the provided graphical programming environment.
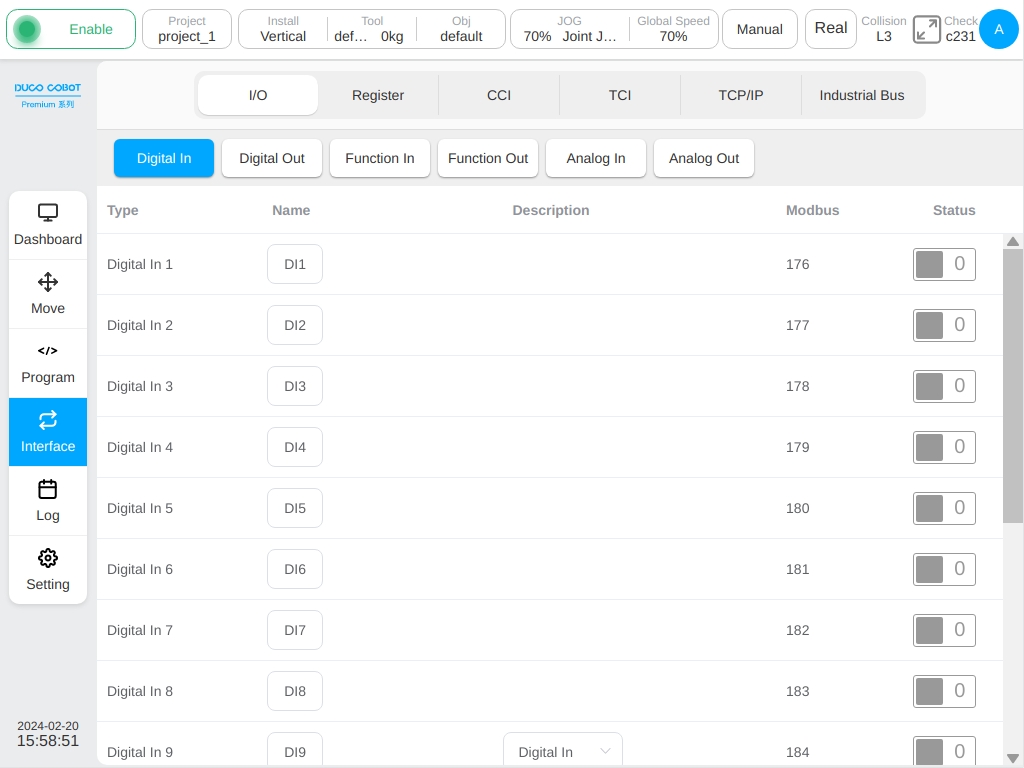
The interface page allows user to configure all external interfaces of the robot including digital input and output, analog input and output, TCP/IP interfaces and other industrial fieldbus interfaces.
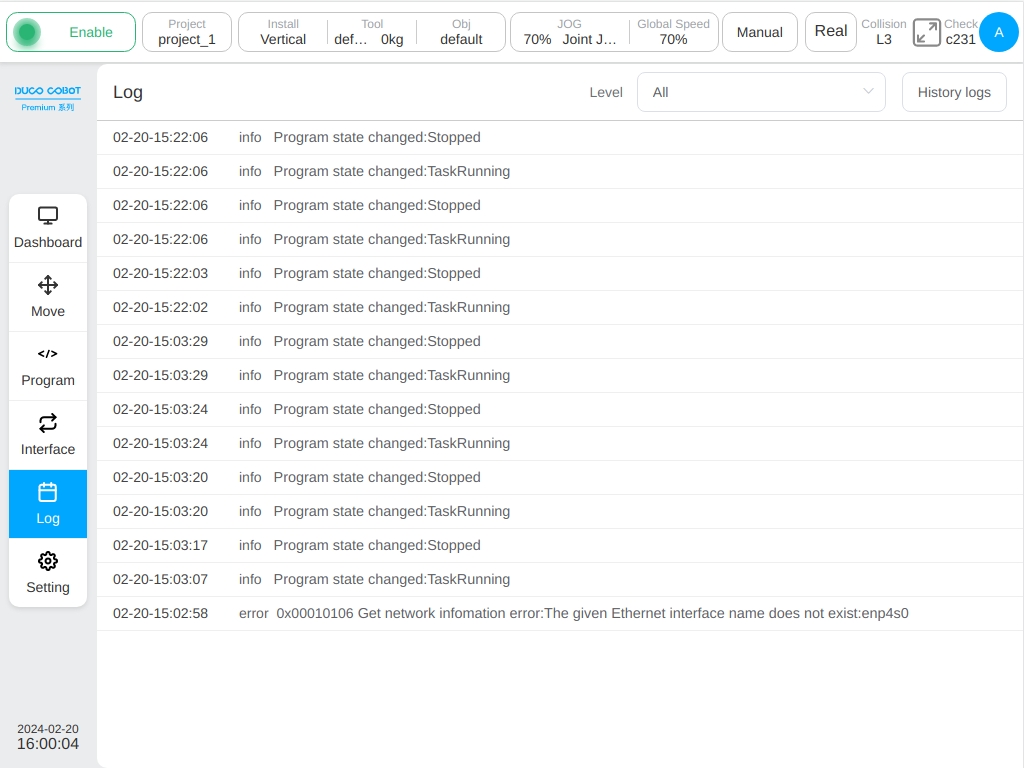
The log page displays system log information from this startup.
The setting page contains current project configuration settings which includs coordinate system settings, installation direction settings and safety settings.

Multi-terminal Connection#
The system supports multiple terminals to be connected at the same time, but only one terminal has the control, and can carry out all functions such as program operation and system configuration. Other terminals only have the permission to look over that cannot access to run the robot or modify settings. The terminal without control permission is shown as follows:
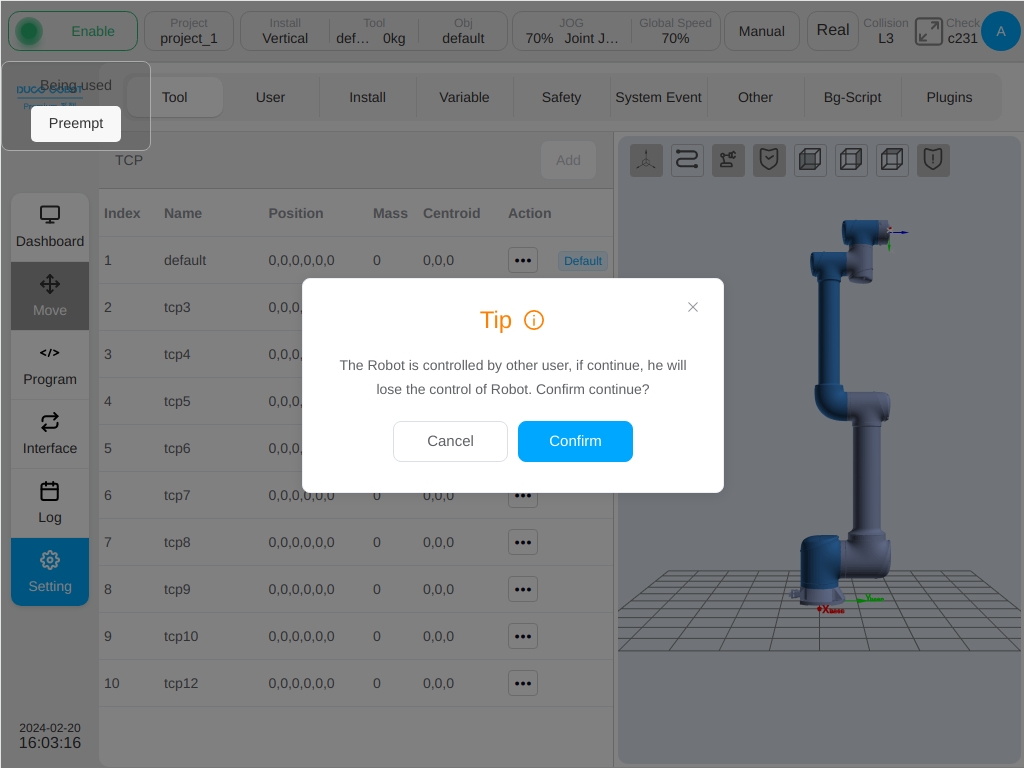
When other terminals want to get control, click the “Get Control” button in the upper left corner to ask for permisson. Poping up the following dialog box, click the ‘OK’ button to obtain the control of the system, then the control of the previous terminal will lost.
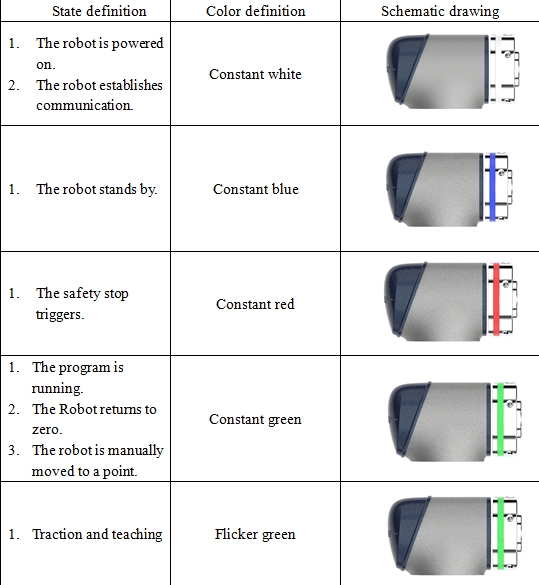
End Light with Indicator#