


安全性#
概要#
本稿では、ロボットおよびその構成部品の設置、使用、保守を行う際に注意すべき安全事項およびリスクアセスメントに対応する重要な情報を紹介する。
操作を行う前に、機器に同梱されている操作説明書、特に人体や機器の安全を脅かす危険性、警告、注意事項をすべてお読みになり、事故の可能性を最小限に抑えるようにしてください。本書と機器に同梱されている文書が異なる場合は、機器に同梱されている文書が優先されます。
本機の設置および保守を担当する者は、適切な操作方法とすべての安全注意事項を習得した、訓練を受けた専門家でなければなりません。装置の設置およびメンテナンスは、訓練を受けた有資格者のみが行うことができます。
効果的な範囲と責任声明#
本情報は、完全なロボットシステムの設計、設置、操作方法をカバーするものではなく、また、システム全体の安全性に影響を及ぼす可能性のあるすべての周辺装置をカバーするものでもありません。人の安全を守るためには、十分に設計されたシステムが必要であり、ロボットが設置される国の規格や規則に定められた安全要件に従って設置されなければならない。
ロボットインテグレーターは、ロボットシステムがその所在する国または地域の適用される安全法規に準拠していること、およびロボットシステムの操作者を保護するために必要な安全装置が適切に設計され設置されていることを保証する責任を負うものとする。
詳細は以下の通りだが、これらに限定されるものではない:
ロボットシステムがすべての基本要件を満たしていることを確認する;
システム全体のリスク評価を行う;
システム全体の設計と設置が正確であることを確認する;
ソフトウェアに適切な安全設定を行い、ユーザーによって変更されないようにする;
詳細な取扱説明書を作成する;
適合宣言書を発行する;
技術文書のすべての情報を収集する;
設置したロボットシステムには、インテグレーターのロゴと連絡先情報をラベルに記載する。
株式会社サイアサンは、信頼できる安全情報の提供に努め、信頼できる安全情報の提供について、株式会社サイアサンに故意または重大な過失がない限り責任を負いません。ロボットシステムは、安全な操作に従ったとしても、使用者に人的・物的損害が発生しないことを保証するものではありません。
株式会社サイアサンは、以下の事由により生じた利用者の損害について、一切の責任を負いません:
不可抗力(自然災害、火災、戦争など);
ロボットシステムの自然損傷または摩耗;
現場の動作環境(電圧、温度、湿度など)または外的要因(外部干渉など)が、促された通常動作のための環境要件を満たさない;
ロボットシステムが正しくインストールされていない(移設後に正しく再インストールされていない場合を含む);
ユーザーまたは第三者の故意または過失による使用、不適切な使用(ユーザーが本ユーザーマニュアルおよび/またはSiasun Limitedのその他の要件に従って使用しなかった場合を含む)、または妨害行為。
株式会社サイアサンは、別段の合意がない限り、ロボットシステムの使用に起因する間接的、特別または偶発的な損失(収益の損失、実際のまたは期待される収益の損失、事業の損失、機会の損失、信用の損失、データの損失、損害、開示などを含むがこれらに限定されない)について責任を負いません。
リスク評価#
リスクアセスメントは、インテグレーターが行わなければならない最も重要な作業の一つである。ロボット自体は部分的に完成した機械であり、ロボット設置の安全性は、ロボットがどのように統合されるか(ツール、障害物、他の機械など)によって決まる。
インテグレーターは、国際規格ISO 12100、ISO 10218-2、ISO/TS 15066(または中国規格GB 15706、GB 11291.2、GB/T 36008などの対応する国家規格)の規定に従ってリスクアセスメントを実施することを推奨する。リスクアセスメントを実施するインテグレーターは、ロボットのアプリケーションライフを通じて、以下のようなすべての作業手順を考慮する必要がある:
ロボットの設置を開発する際、ロボットに教える;
故障診断とメンテナンス
ロボット設置の通常操作。
リスクアセスメントは、ロボットに初めて電源を入れる前に実施する必要があります。インテグレーターが行うリスクアセスメントの一環として、正しい安全設定を確認し、緊急停止ボタンやその他の保護措置が必要かどうかを判断します。
以下に、インテグレーターが考慮しなければならない主なリスクを示します。特定のロボット機器に関連する他の重大な危険が存在する可能性があることに注意してください。
指はロボットの関節4と関節5に挟まれている;
工具や工具コネクタの鋭利なエッジや尖った部分が皮膚を刺す;
ロボットの軌道に近い障害物の鋭角や尖った部分が皮膚に刺さる;
ロボットのペイロードと固体表面との間の衝撃による捻挫または骨折;
ロボットやツールを固定するためのボルトが緩んでいる場合の影響;
工具から物品が落下する(不適切なクランプや停電などによる);
機械によって非常停止ボタンが異なることによる操作ミス。
ロボットの内部安全機能(例:危険なツールの使用)を使用してリスクを十分に排除できない非協力的なロボットアプリケーションにロボットを設置する場合、システムインテグレータはリスクアセスメントに基づいて追加の保護装置を設置する必要があります(例:インストールおよびプログラミング中にインテグレータを保護できる保護装置の使用)。株式会社サイアサンは、保護装置を取り付けなかったために生じた損害について責任を負いません。
安全運転#
緊急停止#
緊急停止は、他のすべてのロボット制御操作よりも優先される条件であり、すべての制御された危険な停止をもたらし、ロボットドライブからモーター電力を除去し、リセットされるまでアクティブなままであり、手動操作によってのみ復元可能である。
緊急停止状態は、電源システムが切断され、ロボットが動けないことを示す。ユーザーは復帰ステップ、つまり非常停止ボタンをリセットし、ティーチペンダントの “Power on “ボタンを押して通常動作を再開する必要がある。緊急停止はリスク低減の手段として使用することはできませんが、二次的な保護装置として使用することができます。
緊急停止を通常のプログラム停止に使用しないでください。
安全関連機能#
安全機能紹介#
他のロボットや追加保護装置を接続するために、GCRシリーズロボットは様々な内部安全機能、非常用電気インターフェース安全I/O、デジタルおよびアナログ制御信号を装備しています。
Caution
安全機能とインターフェースの使用と構成は、各ロボットアプリケーションのリスクアセスメント手順に従ってください。
ロボットが安全システムの故障または違反を発見した場合(例えば、緊急停止回路のいずれかのワイヤーが切断された場合、または安全リミットに違反した場合)、停止カテゴリー0が開始されます。
停止時間は、アプリケーションのリスクアセスメントの一部として考慮されるべきである。
Warning
リスクアセスメントで決定されたものとは異なる安全構成パラメータを使用すると、ハザードが合理的に除去されなかったり、リスクが十分に低減されなかったりする可能性がある。
工具とグリッパーが適切に接続されていることを確認し、電源が遮断されても危険が生じないようにしてください。
エンドエフェクタが GCR 安全システムで保護されていない。エンドエフェクタと接続ケーブルは監視されていません。
安全停止カテゴリー#
状況に応じて、ロボットはIEC 60204-1に従って定義された3つの停止カテゴリーを作動させることができます。これらのカテゴリーは以下の表で定義されています。
0(SS0)
ロボットの電源を直ちに切断します
1(SS1)
各関節の速度を最速の加速で直ちに 0 に減速し、関節が静止した後にロック ゲートを跳ね上げ、ロボットの電源を切断します。
2(SS2)
ロボットは軌道を維持しながら静止するまで減速します。静止後、すべての関節は有効な状態のままで、ブレーキは動きません。
ストップのカテゴリーを切り替える
カテゴリー1停止が実行されると、同時にタイマーが作動する。500ms後にロボットが設定された安全速度を超えている場合、カテゴリー0停止に切り替わります。
安全機能#
下表の SIASUN DUCO 協調ロボット安全機能はロボットにあり、ロボットシステム、すなわちロボットと接続されたツール/エンドエフェクタを制御することを目的としています。ロボット安全機能は、リスクアセスメントにより決定されたロボットシステムのリスクを低減するために使用されます。
緊急停止 (ES)
SS1 を実行中
保護停止
SS2 を実行中
安全動作停止 (SOS)
ss2 の実行後、SOS モニタリングがトリガーされて現在のロボットの位置偏差が監視され、違反があった場合は SS0 がトリガーされます
関節安全制限位置 (SLP)
しきい値設定に従って、関節位置がしきい値に達すると SS2 がトリガーされます。関節制限がトリガーされると、ss0 が直接トリガーされます。
関節安全制限速度 (SLS)
しきい値設定に従って、関節速度がしきい値に達すると SS2 がトリガーされます。関節速度制限がトリガーされると、ss0 が直接トリガーされます。
TCP 位置制限
しきい値に従って設定される安全平面を設定して、ロボットの作業領域を制限できます。しきい値に達すると、SS2 がトリガーされます。安全プレーンがトリガーされると、安全コントローラは ss0 を直接トリガーします。最大 6 つの安全プレーンと 3 つの TCP 座標系が許可されます。
TCP 速度制限
しきい値設定に従って、しきい値に達すると SS2 がトリガーされます。TCP 速度制限がトリガーされると、安全コントローラは ss0 を直接トリガーします。
肘位置制限
しきい値設定に従って、しきい値に達すると SS2 がトリガーされます。肘位置制限がトリガーされると、安全コントローラは ss0 を直接トリガーします。
肘速度制限
しきい値設定に従って、しきい値に達すると SS2 がトリガーされます。肘速度制限がトリガーされると、安全コントローラは ss0 を直接トリガーします。
関節力制限
しきい値設定に従って、しきい値に達すると SS2 がトリガーされます。関節トルク制限がトリガーされると、安全コントローラは直接 ss0 をトリガーします。
TCP 力制限
しきい値設定に従って、しきい値に達すると SS2 がトリガーされます。エンド力制限がトリガーされると、安全コントローラは直接 ss0 をトリガーします。
肘力制限
しきい値設定に従って、しきい値に達すると SS2 がトリガーされます。肘力制限がトリガーされると、安全コントローラは直接 ss0 をトリガーします。
電力制限
しきい値設定に従って、しきい値に達すると SS2 がトリガーされます。電力制限がトリガーされると、安全コントローラは直接 ss0 をトリガーします。
モード切り替え入力
物理入力が無効になっている場合は、UI を介して切り替えることができます。ただし、両方を同時に切り替えることはできません。モードが変更されると、SS2 がトリガーされます。スクリプトが一時停止されている場合、スクリプトは引き続き実行できます。
デバイス入力を有効にする
この入力を有効にするかどうかを選択できます。この入力は手動モードでのみ有効で、自動モードでは有効ではありません。違反すると SS2 がトリガーされます。
保護停止入力
このパラメータがすべてのモードで有効な場合、SS2 がトリガーされます。安全保護リセット入力がアクティブでない場合は、信号が消えた後に自動的にリセットされます。それ以外の場合は、リセットを実行する前にリセット入力をトリガーする必要があります。
保護停止リセット入力
信号入力をリセットするかどうかを選択できます。安全保護リセットがアクティブになっている場合、トリガー安全保護が停止し、トリガー信号が消えると、動きを続行する前にチャネル信号入力が必要です。立ち上がりエッジが有効で、高レベルを 500 ミリ秒間維持する必要があります。
自動保護停止入力
このパラメータは自動モードでのみ有効です。SS2 がトリガーされます。信号が消えると、安全モードは通常に戻ります。
自動保護停止リセット入力
保護停止リセット入力と同様に、自動保護停止入力によってトリガーされた保護停止に対してのみ有効です。
システム緊急停止出力
この信号は、システムが緊急停止保護停止出力によってトリガーされた場合にのみ生成されます
保護停止出力
この信号は、保護停止入力が自動保護停止出力をトリガーしたときに出力されます。
自動モード保護停止出力
この信号は、自動モードで保護が停止した場合にのみ出力されます。
削減モード
削減モードがトリガーされ、削減モードに関連するパラメータが使用されます。
削減モード出力
この信号はグローバルに出力できます。
回復モード
ジョイント制限または TCP 制限を超えた場合は、再起動して回復モードに入る必要があります。回復モードでは、ジョイント速度が 30 度/秒以下に、終了速度が 250 mm/秒以下に制限されます。
安全 IO インターフェース#
安全 IO インターフェースは制御盤が提供する外部 SCram と安全入出力インターフェースで、1 つの SCram 信号入力(受動信号)、1 つの SCram フィードバック出力(能動信号)、1 つの保護停止入力(受動信号)、2 つの設定可能安全入力(受動信号)、2 つの設定可能安全出力(能動信号)を含む。このうち、スクラム信号入力、保護停止入力、設定可能安全入力はハイレベル電子回路で有効で、有効レベルは11V-30VDCです。また、設定可能安全出力とスクラムフィードバック出力を使用する場合は、スイッチング用にリレーを接続する必要があります。
構成可能な安全入力は、ガードリセット入力、オートモードガード停止入力、オートモードガードリセット入力、リデュースモード入力として構成できます。構成可能な安全出力は、ガードリセット出力、自動モードガード停止出力、低減モード出力として構成できます。インターフェイスの定義は以下のとおりです:
安全I/Oインターフェース定義

ID |
信号定義 |
ID |
信号定義 |
|---|---|---|---|
1 |
EI1+ (システム緊急入力 1+) |
2 |
EI1- (システム緊急入力 1-) |
3 |
EI2+ (システム緊急入力 2+) |
4 |
EI2- (システム緊急入力 2-) |
5 |
PS1+ (保護停止入力 1+) |
6 |
PS1- (保護停止入力 1-) |
7 |
PS2+ (保護停止入力 2+) |
8 |
PS2- (保護停止入力 2-) |
9 |
CI1_1+ 設定可能な安全入力 1 (1+)] |
10 |
CI1_1- [設定可能な安全入力 1 (1-)] |
11 |
CI1_2+ [設定可能な安全入力 1 (2+)] |
12 |
CI1_2- [設定可能な安全入力 1 (2-)] |
13 |
CI2_1+ [設定可能な安全入力 2 (1+)] |
14 |
CI2_1- [設定可能な安全入力 2 (1-)] |
15 |
CI2_2+ 設定可能な安全入力 2 (2+)] |
16 |
CI2_2- [設定可能な安全入力 2 (2-)]] |
17 |
EI1+ (システム緊急出力 1+) |
18 |
EI1- (システム緊急出力 1-) |
19 |
EI2+ (システム緊急出力 2+) |
20 |
EI2- (システム緊急出力 2-) |
21 |
CO1_1+[設定可能な安全出力 1 (1+)] |
22 |
CO1_1-[設定可能な安全出力 1 (1-)] |
23 |
CO1_2+[設定可能な安全出力 1 (2+)] |
24 |
CO1_2-[設定可能な安全出力 1 (2-)] |
25 |
CO2_1+[設定可能な安全出力 2 (1+)] |
26 |
CO2_1-[設定可能な安全出力 2 (1-)] |
27 |
CO2_2+[設定可能な安全出力 2 (2+)] |
28 |
CO2_2-[設定可能な安全出力 2 (2-)] |
クランプによる負傷と衝突のリスク#
そのため、ユーザーは特殊な作業条件下での衝突検知の失敗やクランプによる怪我のリスクに注意を払う必要がある。以下に3つの典型的な作業条件を説明する。
作業条件1:ロボットの終端位置がロボットベースの中心から1000mm以上離れている場合、ロボットが図2.6.1と図2.6.2に示すように赤矢印の方向に移動すると、ロボットは移動方向の外力に対して敏感でなく、クランプ傷害の危険性が高くなる。図2.6.1及び図2.6.2に示すように、ロボットが緑矢印の方向に移動する場合、ロボットが外部環境と衝突すると、衝突による外力に敏感になる。
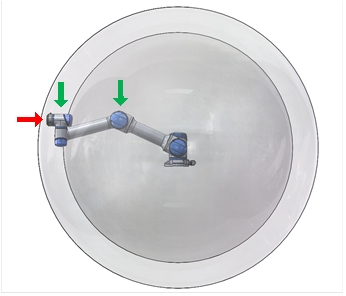
図2.6.1 作業中のロボットの正面図
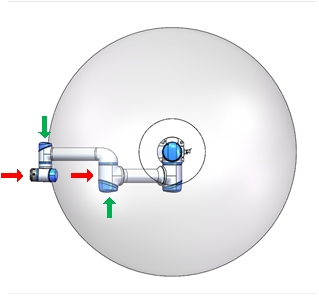
図2.6.2 作業中のロボットの上面図
作業条件2:ロボットベースのZ方向を中心とし、半径を約350mmとしたとき、接触点がこの範囲内にあり、かつ接触力の方向が関節2と関節3の連結棒がある平面に対して垂直である場合、衝突検出機能はロボットと外界の衝突を検出することが困難である。図2.6.3、図2.6.4の赤矢印のようになる。この時、ロボットと外界の接触力の方向がベースマークZの方向と一致していれば、図2.6.3の緑矢印のように衝突によって発生する外力に対してより敏感に反応する。
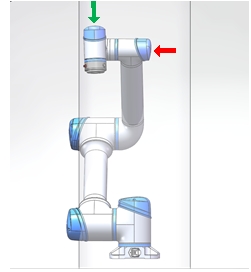
図2.6.3 作動状態2の正面図
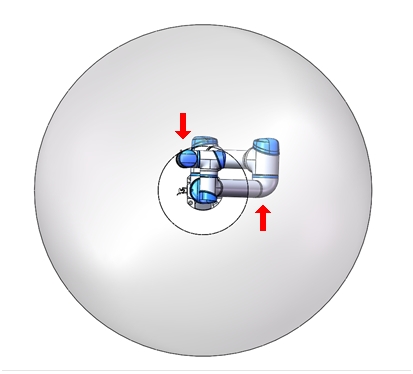
図2.6.4 作業状態2の上面図
作業条件3:ロボットがどのような姿勢、運動状態であっても、外界と衝突する場合、衝突点がロボットの基点位置の原点を中心とし、半径が350mm程度であれば、図2.6.5、図2.6.6の赤矢印に示すように、ロボットがこのような衝突を検知することは困難であり、ニップ傷害の危険が発生しやすい。衝突点が範囲外で、作業条件1、2で述べた衝突検知不感帯条件を満たさない場合は、図2.6.5、図2.6.6の緑矢印で示すように、ロボットは外界との衝突を検知しやすくなる。
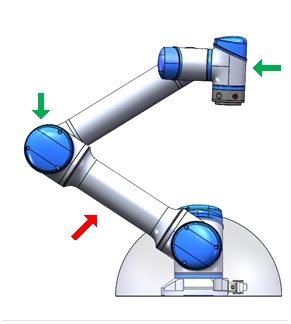
図2.6.5 労働条件の三面図
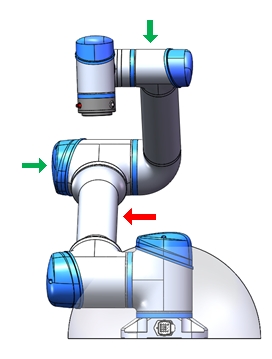
図2.6.6 労働条件に対する3つのポジティブな見方
上述したすべての作業条件において、ロボットが外部からの衝突検知に敏感でない方向に移動している場合、外界との協働力を制限する必要性を考慮し、この時点での走行速度を可能な限り低下させる必要がある。
不幸にしてニップ事故が発生した場合、保持ブレーキ機能を手動で解除することで、事故によるダメージを軽減することができる。

ロボットの電源が入っているが有効になっていない場合、インターフェースの左下にある “手動解除ブレーキ機能 “を起動することができます。Manual Release Brake “ボタンをクリックした後、インターフェイスは下図のように切り替わります:
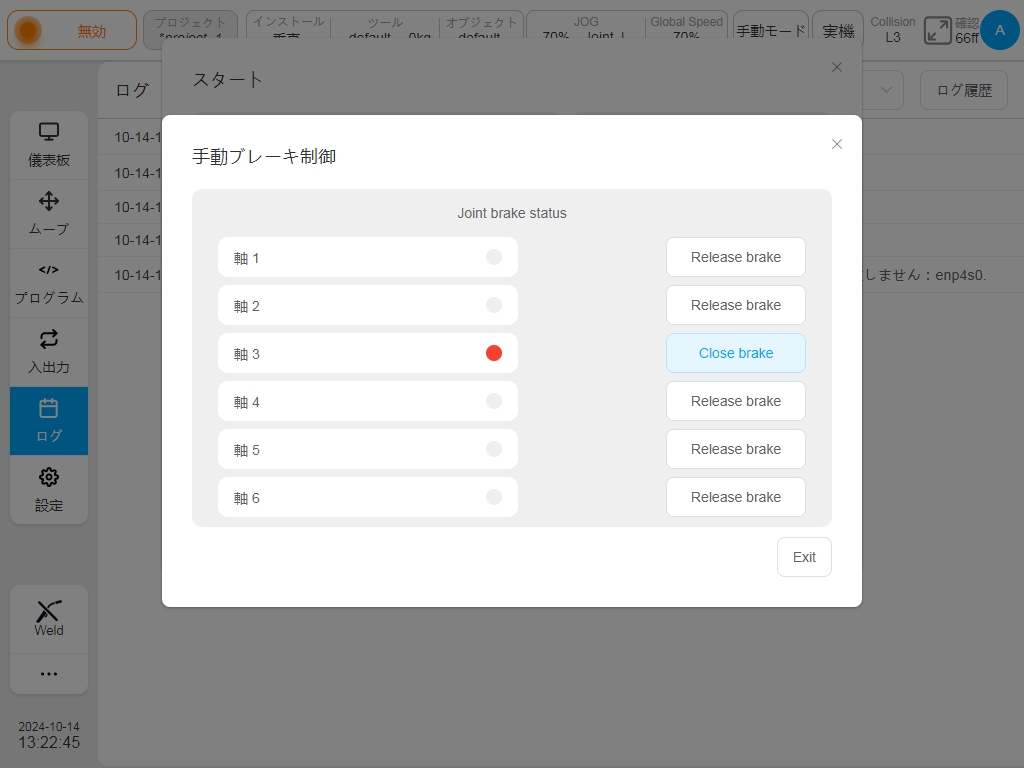
ブレーキ解除 “ボタンをクリックすることで、対応するジョイントのブレーキが解除され、無動力での駆動が可能になります。インターフェイスの左側にある赤いインジケータライトは、保持ブレーキの状態を示すために使用されます。ブレーキを閉じる “ボタンをクリックすると、対応するジョイントのブレーキが閉じます。
ロボット特異点の速度超過リスク#
特異点付近で動作計画(関節動作を除く直線、円弧等)を行う場合、ロボットは自動的に減速し、ティーチング時には特異点を避けるか、関節動作で特異点を通過する必要があります。GCRシリーズの構成には、肩特異点、肘特異点、手首特異点があります。
肩の特異点#
手首の関節の中心O6が関節1の軸J1上に位置する場合、肩の特異性が同時に発生し、関節1の解が得られない。また、O6がJ1に非常に近い位置にある場合にも特異点が発生し、端を動かすと関節1がオーバードライブする可能性があります。ポーズに近い特異なポーズについては、下図を参照してください。
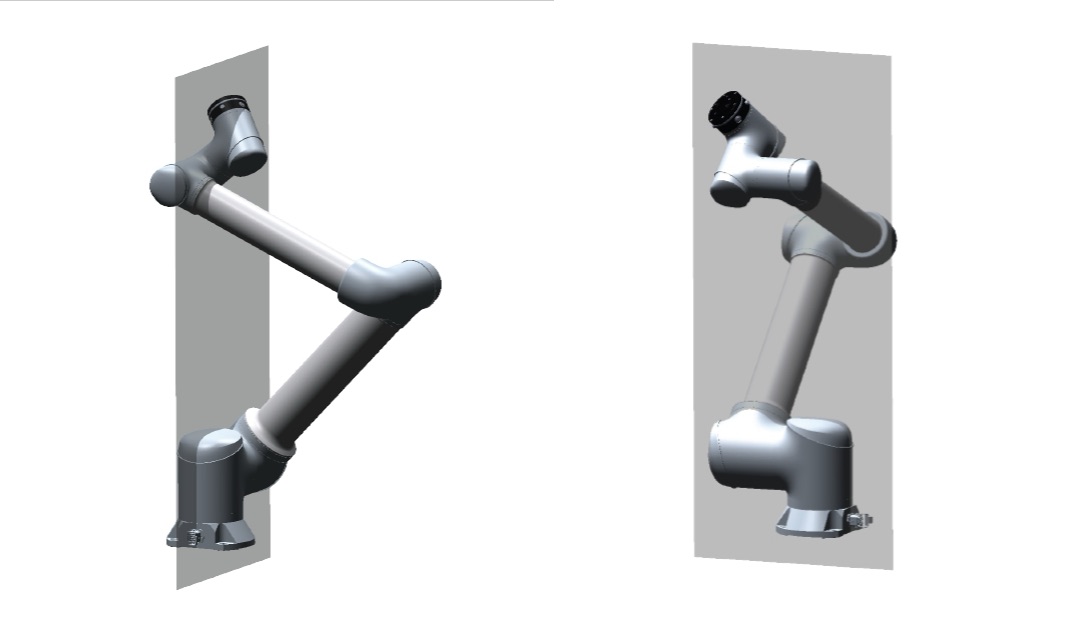
図2.7.1 肩の特異点の基準ポーズ
肘の特異点#
関節2、関節3、関節4の軸がそれぞれJ2、J3、J4を示すとき、関節2が共平面になるため、関節2の解は得られない。単純に、関節3が0度に近い特異なポーズにあるとき、その端を動かすと、関節2、関節3、関節4がオーバードライブする可能性があります。肘付近の特異ポーズについては、下図を参照してください:
図2.7.2 肘の特異点の基準ポーズ
手首の特異点#
関節5が0度の場合、関節6に解がなく、手首が特異な状態になる。関節5が0度に近い場合、手首付近が特異な姿勢を示し、端を動かすと関節4、関節5、関節6がオーバースピードになる可能性がある。下図参照
図2.7.3 手首の特異点基準ポーズ
上図のようにロボットが特異点近傍を走行する場合、直交座標に基づく運動計画では、各軸の関節運動を逆解法で解くことができず、正しい運動計画を行うことができない。そのため、ノードモーションやmovejモーションコマンドを採用することができる。
Caution
特異点付近での直線、円弧、X,Y,Z,RX,RY,RZ方向の端の移動などのコマンドの使用は避けてください。ロボットが失速する危険性があります。
特異なリスクを持つ軌道については、走る前に十分に評価しなければならない。