程序编辑#
示教添加运动指令#
不启用编码器:
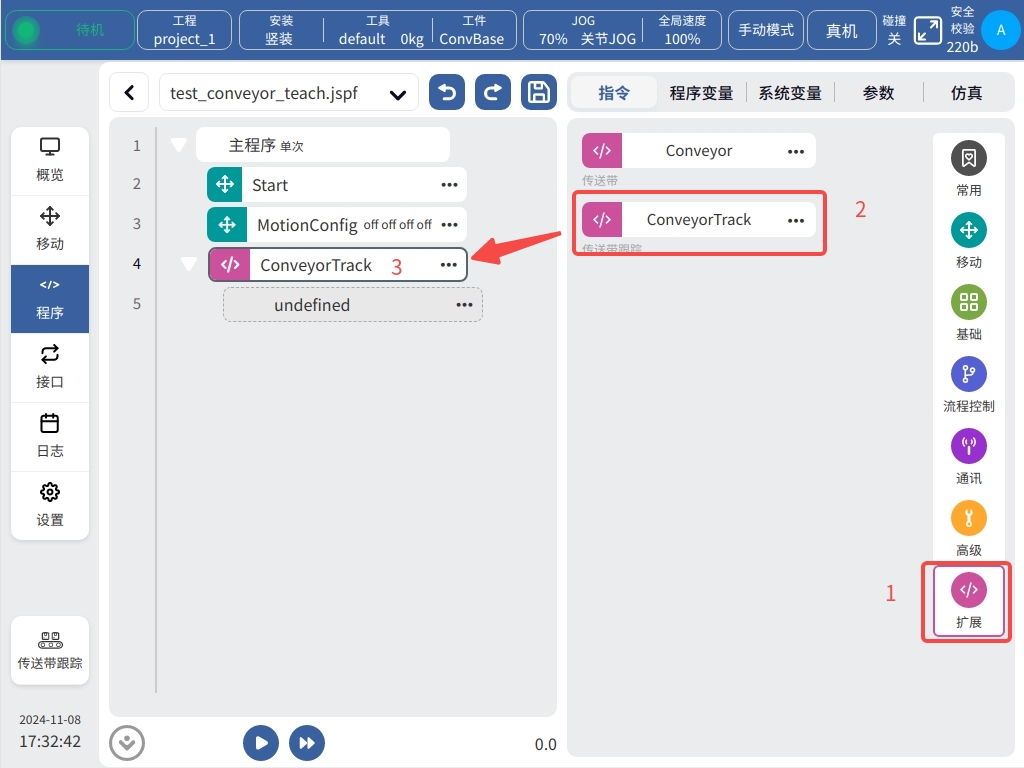
1.如下图,点击1处扩展,选择2处传送带跟踪指令,拖动传送带跟踪指令至3处
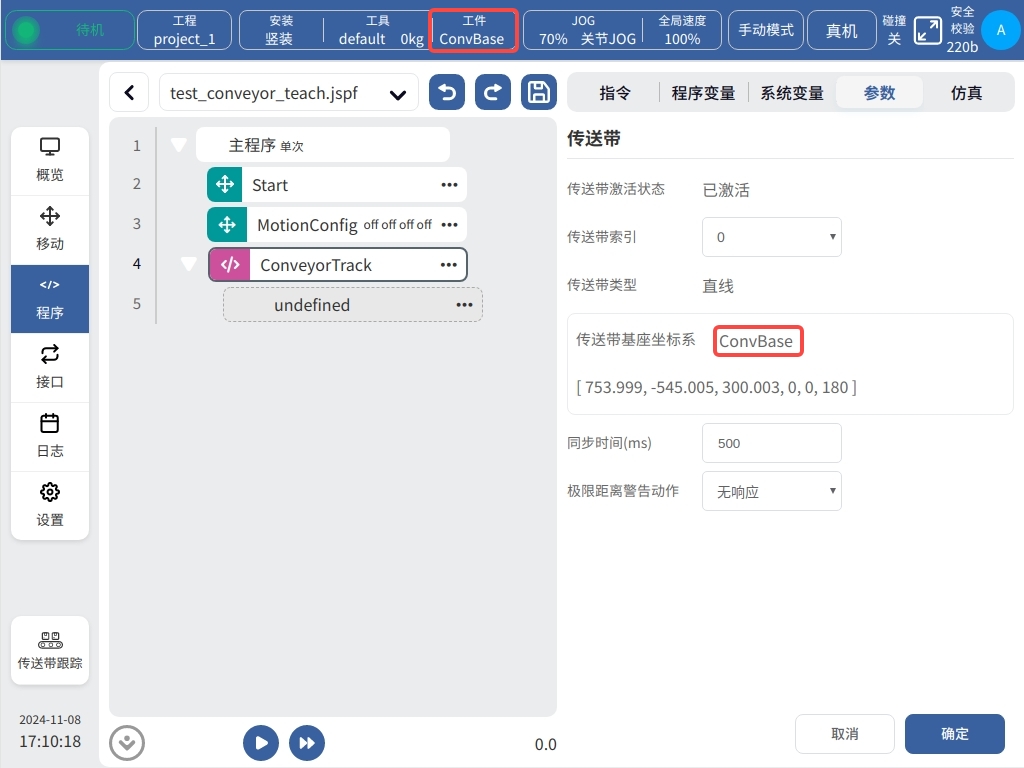
2.开启传送带,将工件移动置开始窗口起始位置,选择工件坐标系为传送带基坐标系。
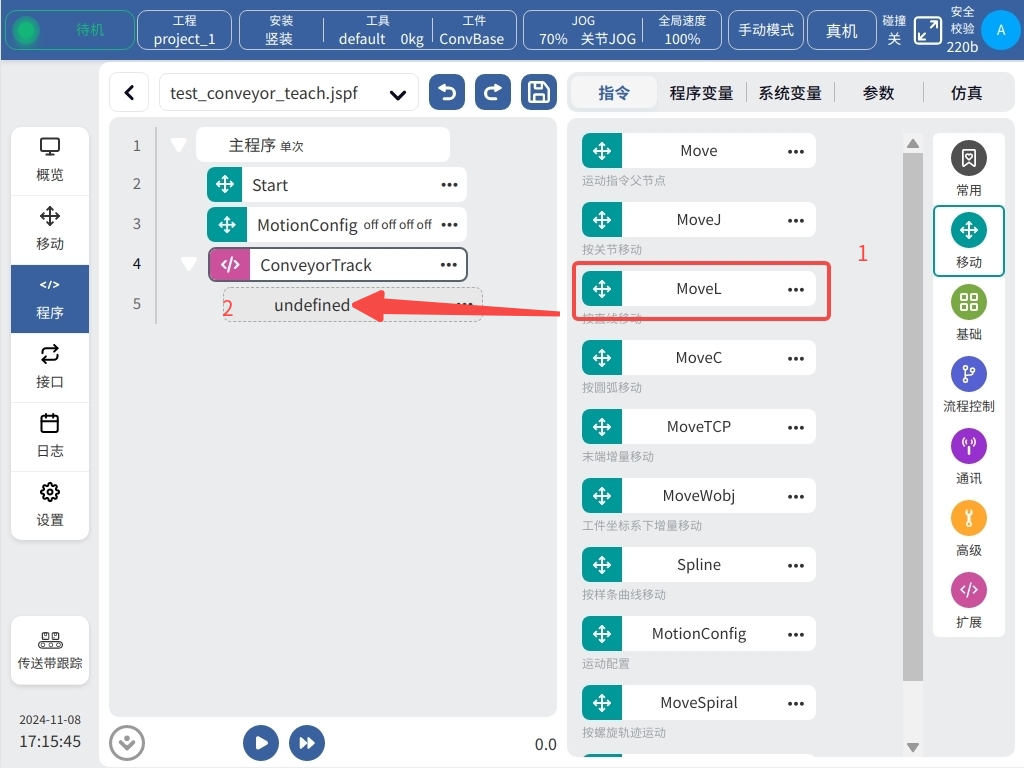
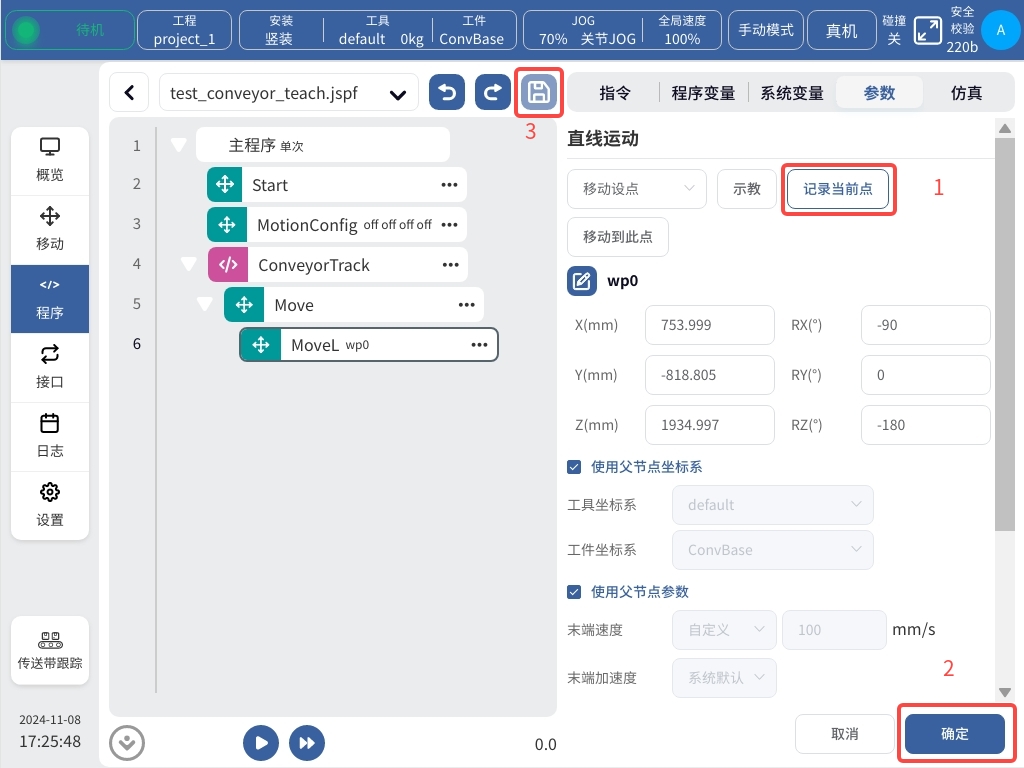
3.如下图所示选择Move指令(1处),并将Move指令拖动到2处
4.将机器人移动到需要示教的点位,点击1处记录此点,2处确定按钮,3处保存程序,即可完成当前点位示教,当采用不启用编码器示教时,对于大工件(示教点位超过机器人有效工作范围)传送带跟踪功能无法实现。
5.重复步骤3,4即可完成工作点位的示教
启用编码器:
1.如下图,点击1处扩展,选择2处传送带跟踪指令,拖动传送带跟踪指令至3处
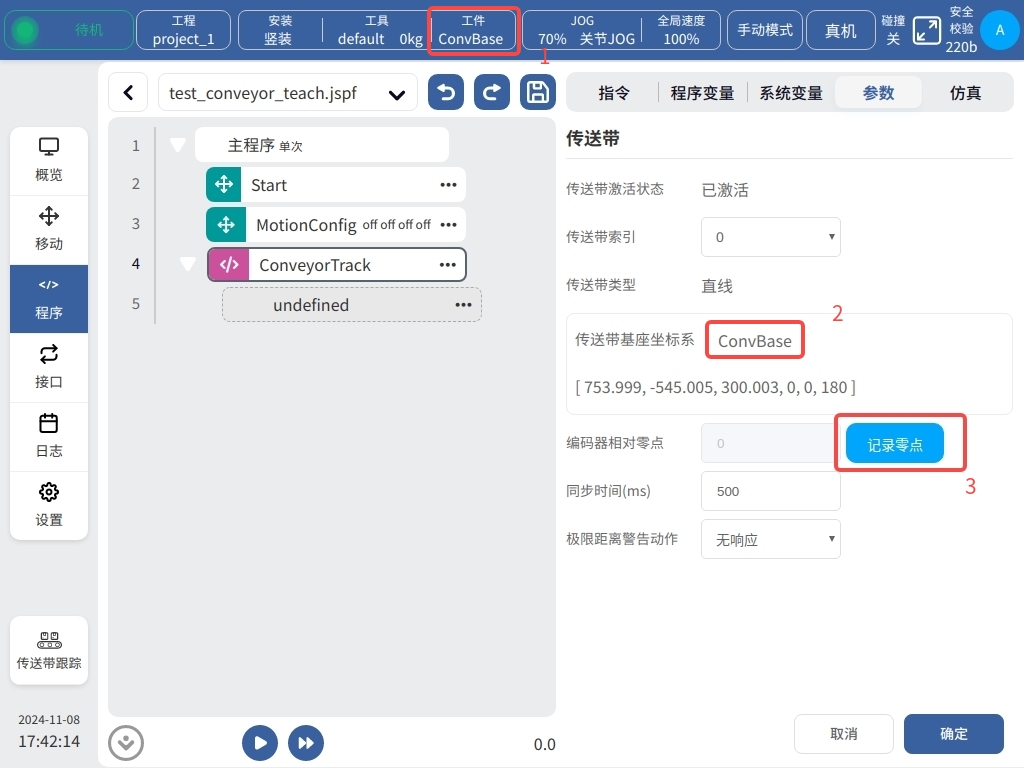
2.开启传送带,将工件移动置开始窗口起始位置,选择工件坐标系为传送带基坐标系,同时点击3处记录零点,需要注意的是, 对于启用编码器在示教点位前一定要先记录编码器零点,后续示教工作点位都会基于该零点对标定位置进行修正。切记在示教过程中不可人为更改工件位置。
3.如下图所示选择Move指令(1处),并将Move指令拖动到2处
4.将机器人移动到需要示教的点位,点击1处记录此点,2处确定按钮,3处保存程序,即可完成当前点位示教。
5.如果在示教过程中,工作点位超出机械臂有效工作空间(特别是对于大工件的跟踪作业),需开启传送带使工件上的示教点位进入到机器人工作范围内,再移动机械臂对该点位完成示教,重复步骤3,4,5, 即可完成工件上的工作点位示教。
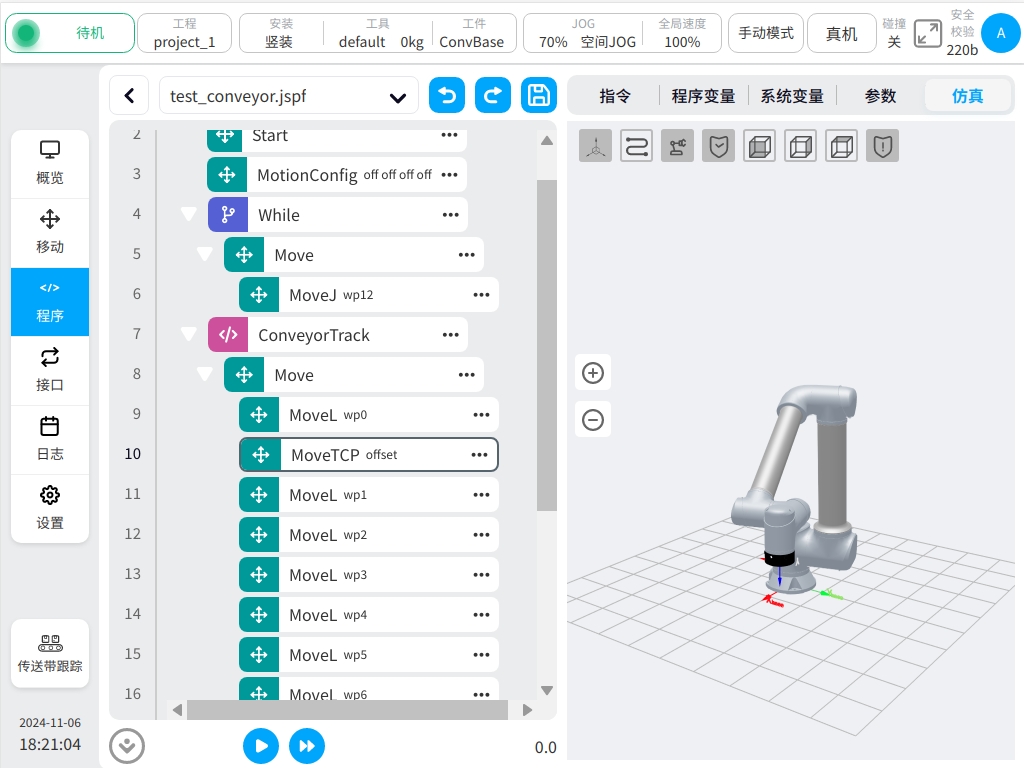
程序示例#
重复5.1中的操作,根据实际情况依次添加MoveL, MoveC, MoveJ(位姿模式),MoveTcp到程序树中(下图1处)。 特别需要注意的是,所有Move运动指令中记录的工件坐标系需要显示为传送带基座坐标系(本例中为ConvBaseTest),否则在运行到对应Move运动指令时会产生报错。如果程序记录的工件坐标系不是传送带基座坐标系,即下图中2处坐标系不是传送带基座坐标系,则需要切换到设置界面中,并将传送带基座坐标系设为当前,重新示教该点,并确认。