传送带跟踪简介#
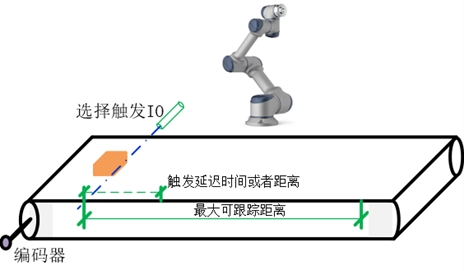
对于传送带上放置的工件,工件会随着传送带向前移动,当用户选择使用传送带跟踪系统时,机器人 TCP将会自动跟踪传送带上移动的工件,当机器人与工件处于同步阶段时,机器人TCP速度将会保持 与传送带速度一致,并且可承受传送带一定的速度波动。
传送带跟踪组成部分#
对于传送带上放置的工件,工件会随着传送带向前移动,当用户选择使用传送带跟踪系统时,机器人TCP将会自动跟踪传送带上移动的工件,当机器人与工件处于同步阶段时,机器人TCP速度将会保持与传送带速度一致,并且可承受传送带一定的速度波动。
编码器参数配置#
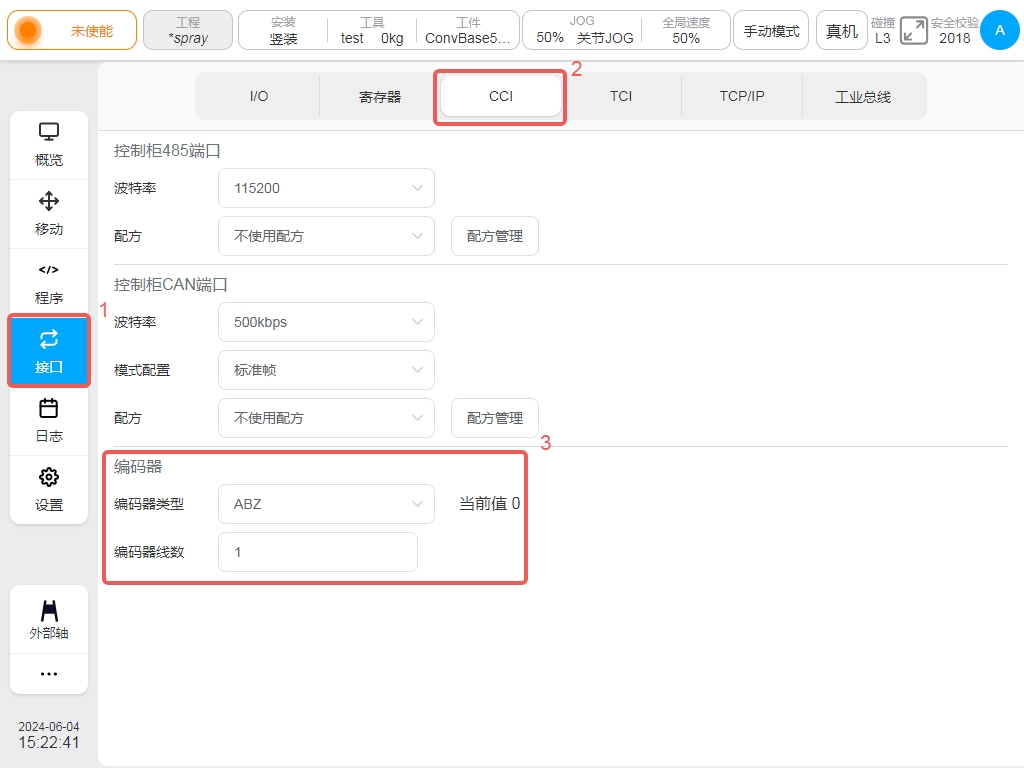
机器人传送带编码器支持AB和ABZ两种类型,用户根据实际情况进行配置,配置界面在接口界面里,操作流程参照下图,具体操作步骤为,1)点击1处接口,2)点击2处的CCI,3)根据实际情况选择3处的AB或者ABZ。当编码器类型选择为ABZ时, 用户还需要设置编码器线数,编码器线数设置参照编码器使用说明书或者咨询编码器厂家。