传送带跟踪参数配置#
参数配置#
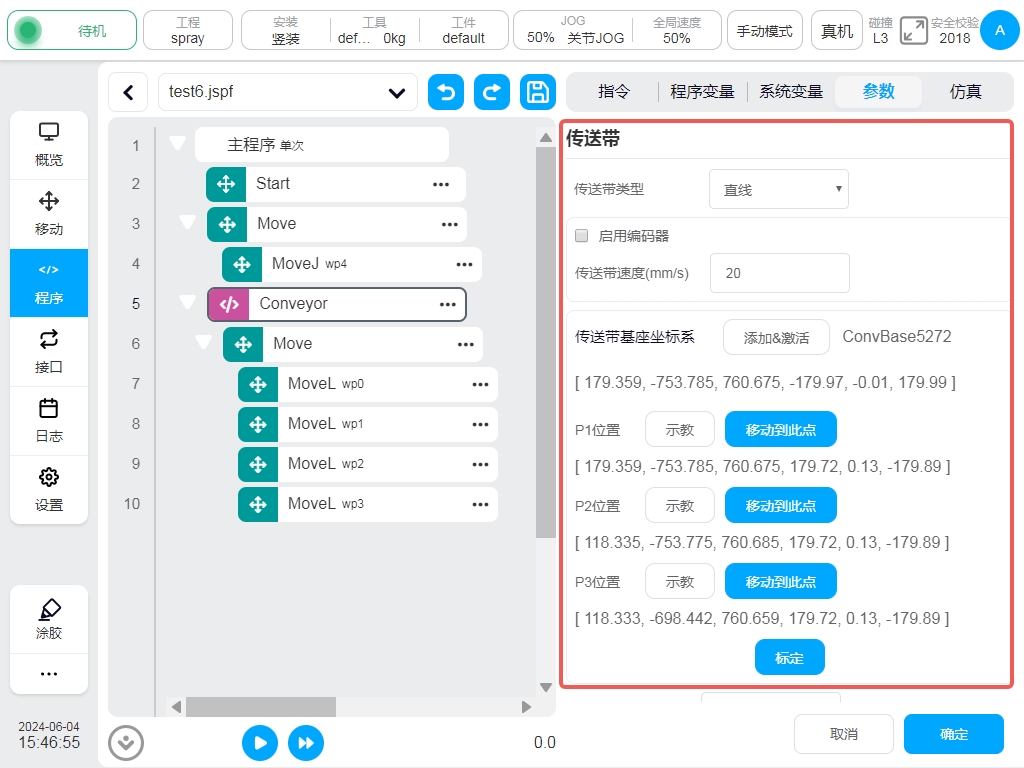
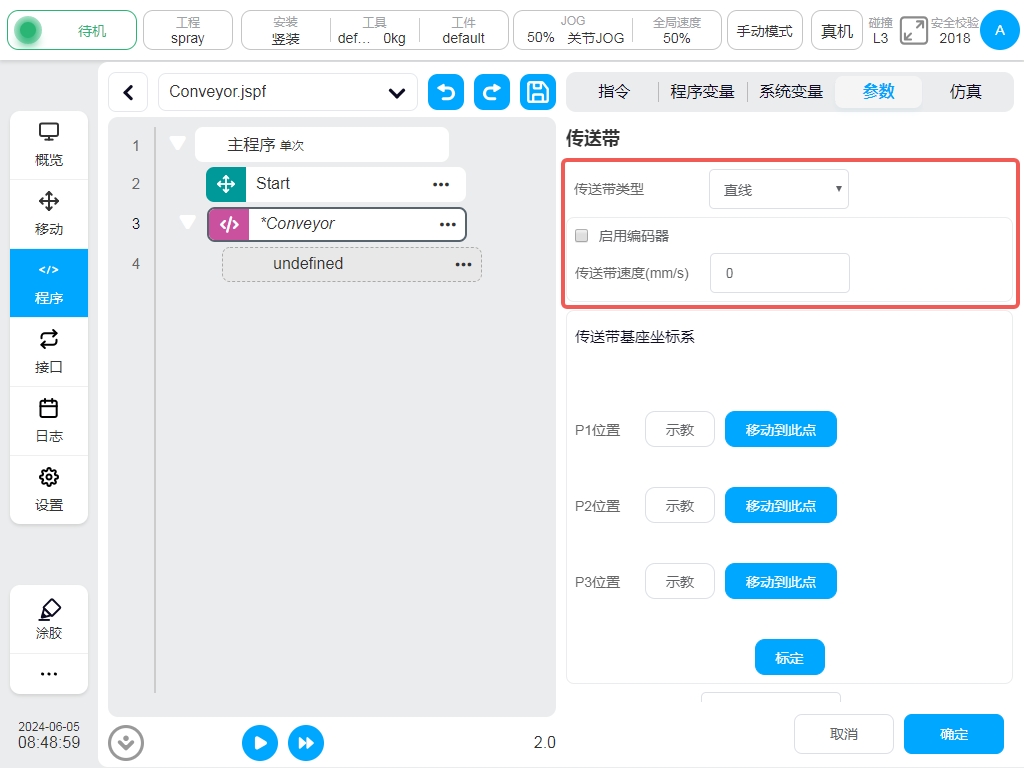
机器人传送带跟踪参数配置包括传送带类型选型、是否启用编码器、传送带速度/编码器系数配置、传送带基座坐标系配置及相关点示教、同步时间、触发跟随输入信号、延迟开始跟随配置、极限跟踪距离、极限距离警告动作等,具体界面可参考下图。
配置流程#
下面以匀速直线传送带为例,简述传送带跟踪配置流程:
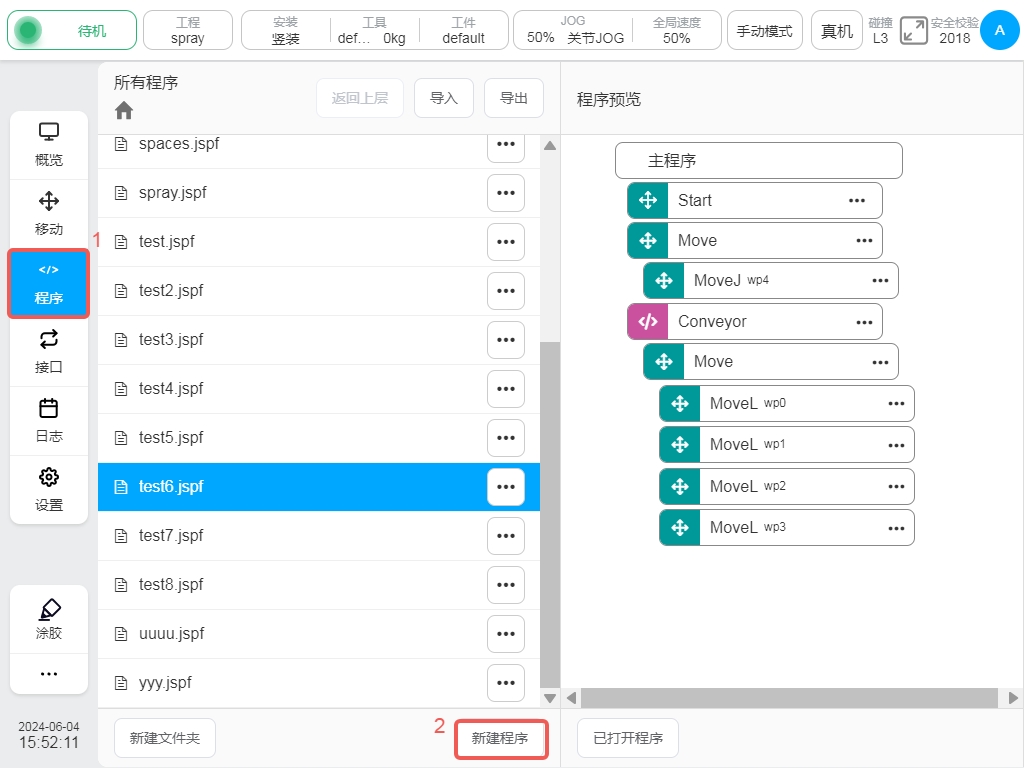
启动机器人控制器,启动UI,点击新建程序视图中1处的“程序”,进入程序界面,如果当前不存在用户传送带跟踪程序,则单击的2处“新建程序”,手动输入程序名,点击确认,即可完成程序创建。如果需打开已有传送带跟踪程序,可选中该程序并双击进入该程序,并对传送带指令中的参数进行修改,打开已有程序主要涉及对程序中传送带指令中的参数及点位修改,其操作可涵盖在新建程序操作中,下面主要以新建程序操作为例,对传送带操作进行说明:
新建程序视图
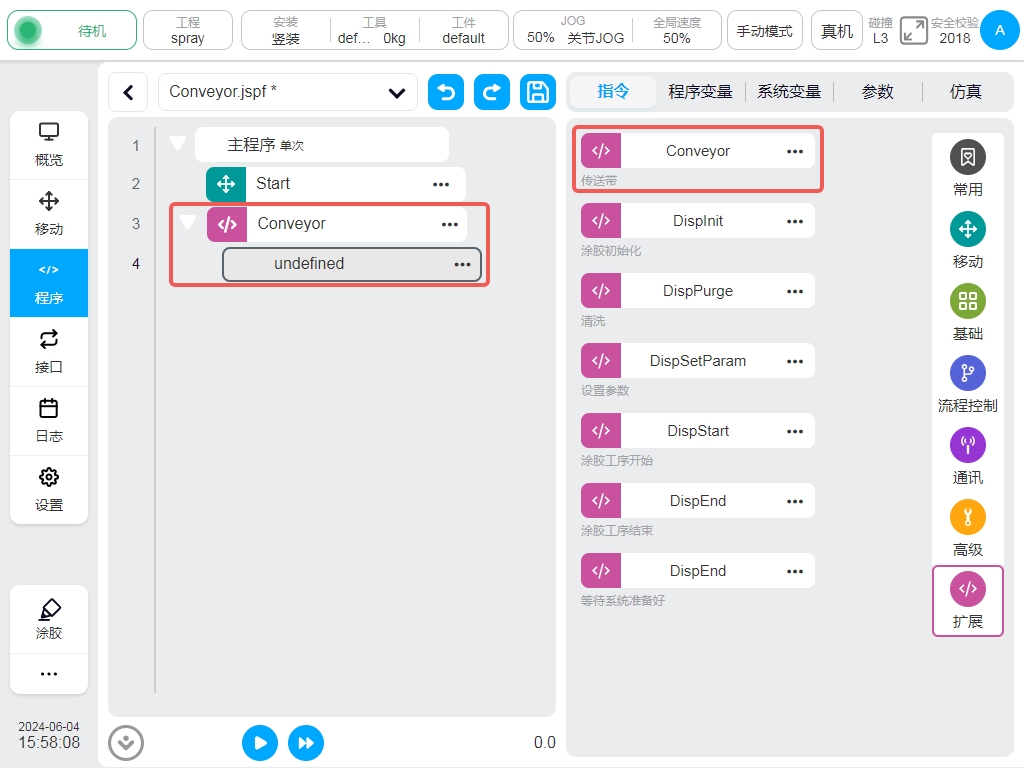
进入jspf程序后,对传送带跟随起点位置进行试教,如下图所示:

示教完起始点,添加传送带程序色块Conveyor以进行传送带跟随运动配置,如下图所示:
点击Conveyor色块,进入传送带参数配置界面,根据传送带类型进行传送带参数配置,需要配置的参数包括:
传送带类型:支持直线传送带与圆弧传送带
启用编码器:若传送带连接编码器且具备条件将编码器信号接入控制柜,则启用该选项
传送带速度:若未启用编码器,则需要定义传送带速度,单位mm/s,该速度代表传送带移动线速度
编码器系数:若启用编码器,则需要定义编码器系数,该参数代表传送带编码器CNT数转换为实际传送带移动距离的系数,CNT*系数=传送带移动距离,该系数支持直接输入与示教。若选择直接输入,则用户需要根据实际编码器CNT数与传送带移动距离根据关系表达式换算得到。若选择示教,则用户需要保证后续传送带基坐标系标定过程中编码器被正确记录,从而通过机器人示教点位与编码器实际CNT数计算得到编码器系数
传送带速度:在完成编码器系数配置后示教后,传送带实际运动过程中的线速度会在此处显示,单位mm/s,该速度代表传送带实际移动线速度
完成传送带编码器相关参数配置后,需要对传送带参考坐标系进行示教、标定并添加。如下图所示:
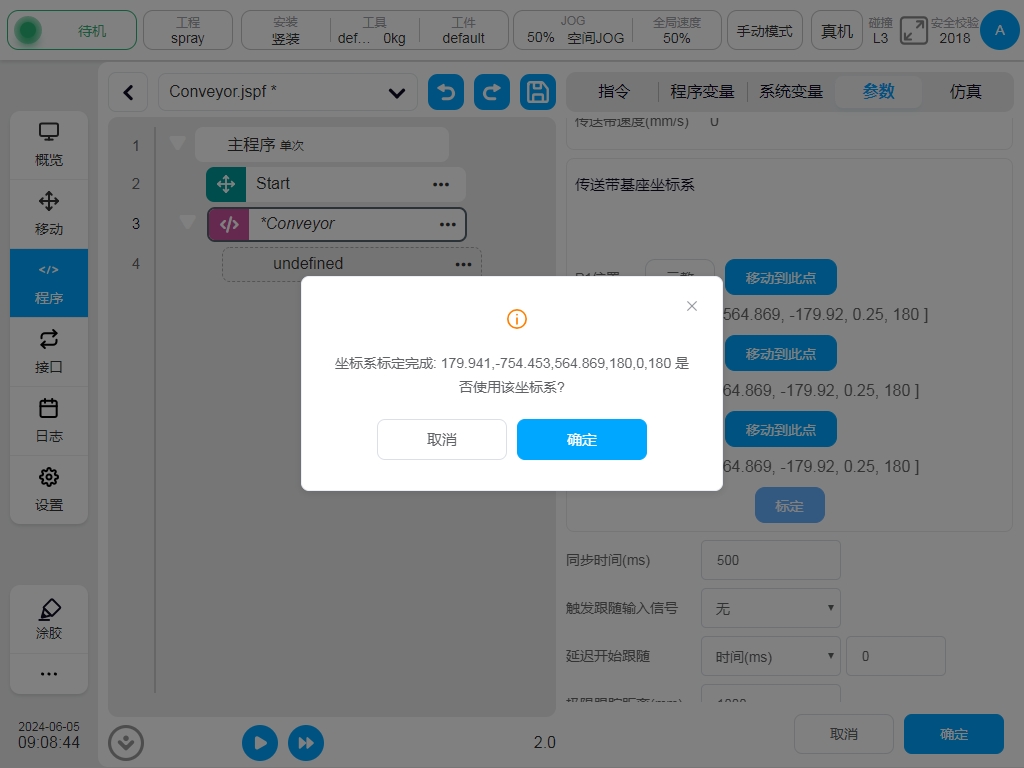

用户需要通过3点示教法完成传送带参考坐标系的标定,在完成后传送带参考坐标系的标定后,点击“添加”按钮将标定得到的传送带基坐标系添加进工件坐标系列表中并生效,该坐标系将作为所有添加在传送带根节点下的Move运动指令的参考工件坐标系,后续用户针对传送带同步过程中的所有运动试教需在该参考坐标系中进行试教。
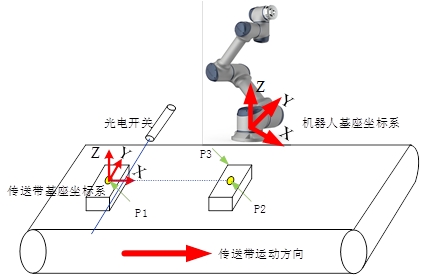
对于直线传送带:P1、P2、P3点的选取,需要注意的是,P1点位置是传送带基座坐标系的位置,即工件刚好触发光电开关信号,工件上标记点在机器人基坐标系下的位置。若使用视觉系统,则参考相应视觉应用说明配置视觉系统,编写程序由视觉系统获取触发时刻工件相对于传送带基坐标系的校准值calibration,保证视觉系统获取的工件坐标系相对于传送带基坐标系的校准值比较准确,且机器人控制器能够及时获取视觉系统的计算校准值。P2点则是工件跟随传送带运动一段距离后的,工件上标记点在机器人基坐标系下的位置,在机器人及传送带工作范围内,尽量使传送带运动距离大一点,这样有利于标定结果的准确。P3点则是在工件标记点与传送带平行平面内,任意选择的点。直线传送带基座坐标系标定示意图如下:
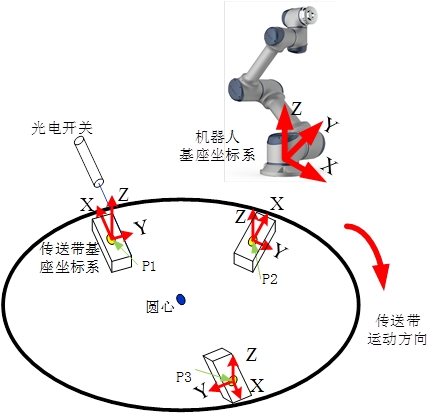
对于圆弧传送带:P1点位置是传送带基座坐标系的位置,即工件刚好触发光电开关信号,工件上标记点在机器人基坐标系下的位置。若使用视觉系统,则参考相应视觉应用说明配置视觉系统,编写程序由视觉系统获取触发时刻工件相对于传送带基坐标系的校准值calibration,保证视觉系统获取的工件坐标系相对于传送带基坐标系的校准值比较准确,且机器人控制器能够及时获取视觉系统的计算校准值。P2点则是工件跟随传送带运动一段距离后的,工件上标记点在机器人基坐标系下的位置,在机器人及传送带工作范围内,尽量使传送带运动距离大一点,这样有利于标定结果的准确。P3点则是工件在P2点之后继续跟随传送带运动一段距离,工件上标记点在机器人基坐标系下的位置。圆弧传送带基座坐标系标定示意图如下:
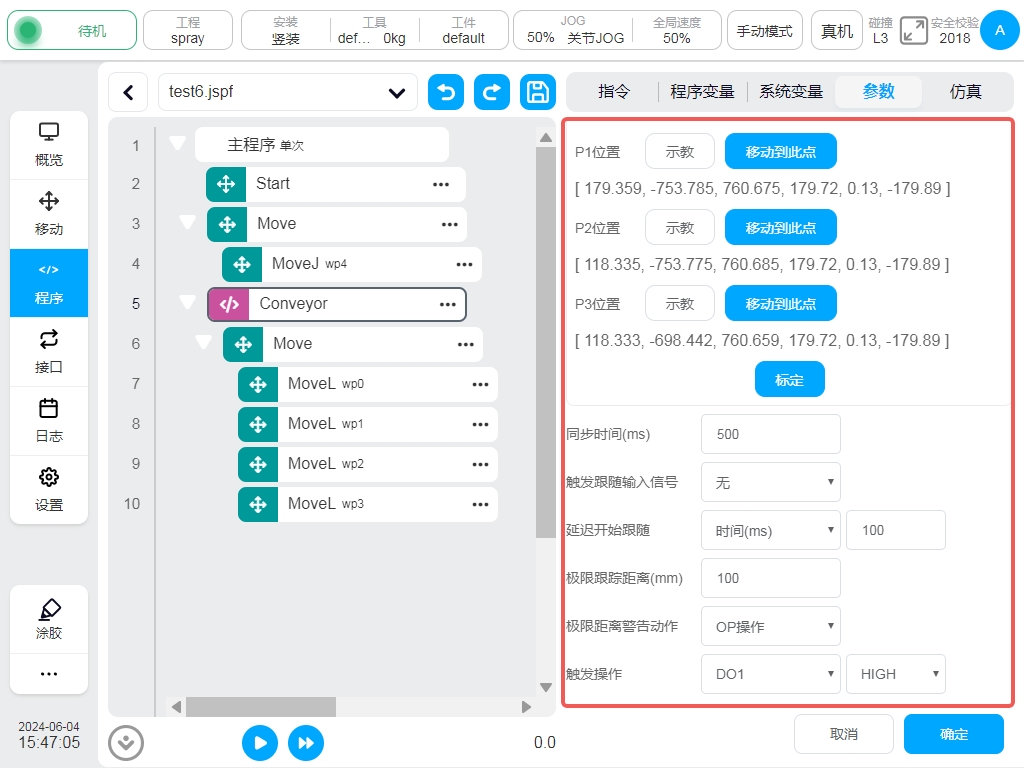
完成传送带参考坐标系的示教、标定及添加后,需要完成剩余传送带跟随应用相关参数的配置,需要配置的参数包括:
同步时间:该参数定义了机器人在接收到开始同步信号到机器人末端从静止状态到同步传送带速度过程所经过的时间,单位ms。该参数会影响机器人末端同步过程产生的加速度,过短的同步时间可能会引起机器人接收到开始同步信号后产生抖动或报错
触发跟随输入信号:该信号定义了触发机器人开始跟随的输入信号,可以选择不依赖任何输入信号或参考控制柜DI输入信号。需要注意的是,若控制柜DI输入信号已被配置为功能输入CI,则此DI不允许被配置为触发跟随输入信号
延迟开始跟随:该参数定义了机器人在接收到开始同步信号到机器人开始执行同步过程的延迟时间(单位ms)或延迟距离(单位mm),用以调整实际同步过程中可能存在的作业精度问题
极限跟踪距离:该参数定义了允许机器人由于传送带跟随所产生的的最大移动距离,单位mm
极限距离警告动作:该参数定义了机器人进行传送带跟随的过程中超过了极限跟踪距离后所要触发的响应动作,从而用以在机器人由于超过了传送带极限跟踪距离而未完成根节点下的所有指令后判断是否需要执行特定响应动作。可配置的警告动作包括无响应、仅弹窗、弹窗并暂停、Op操作。其中Op操作支持将指定控制柜DO输出置为目标电平或触发自定义事件

参数配置完成后,即可对传送带跟踪程序进行编辑。