Multi-machine Collaboration Configuration#
Plug-in installation#
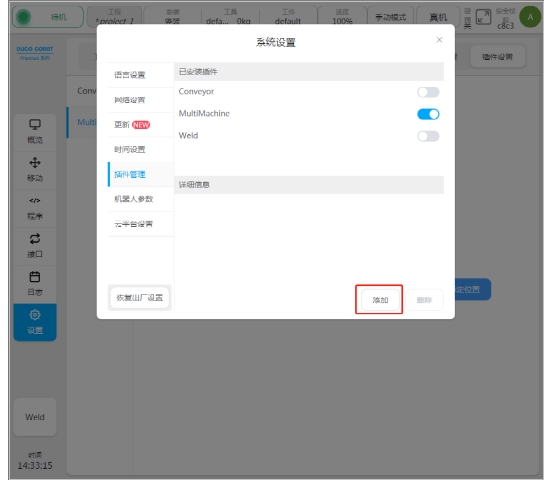
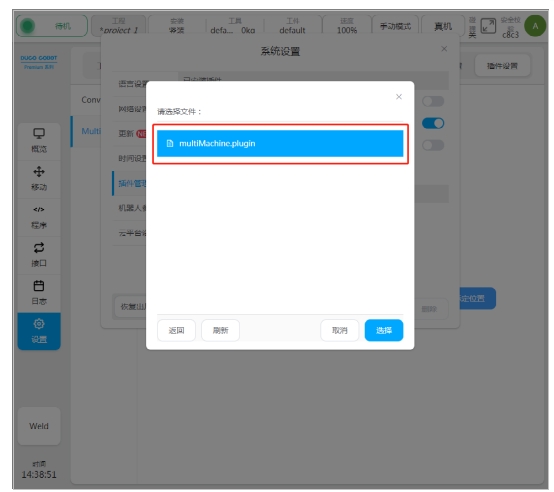
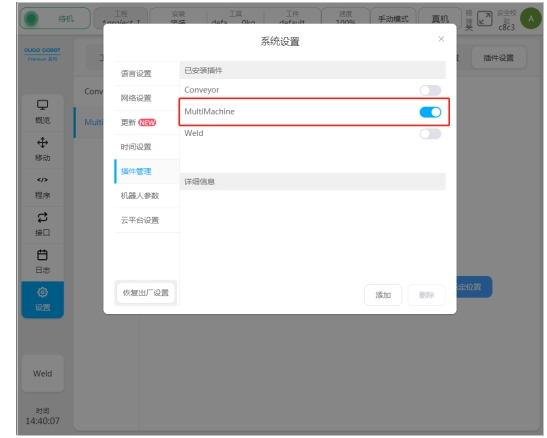
Users need to properly install MultiMachine plug-ins before using multi-machine collaboration. As shown in the picture below:
Master and slave robot communication connection#
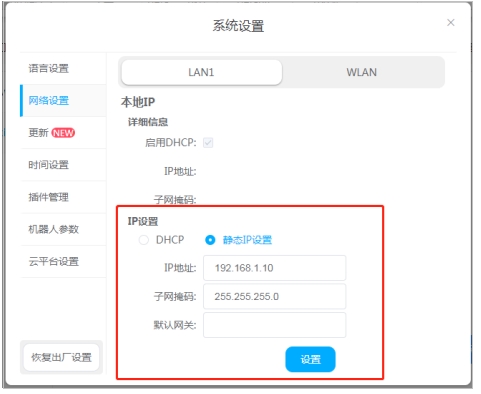
The user must correctly connect the LAN ports on the master and slave robot control cabinets through network cables, and change the IP addresses of the corresponding LAN ports on the controller to the same network segment to ensure that the conditions for establishing TCP/IP communication between the master and slave controllers are met, as shown in the following figure: Master robot LAN port IP configuration:
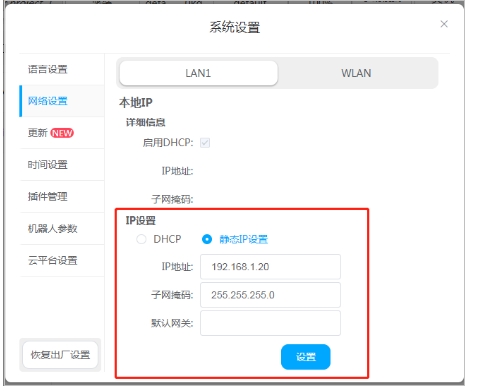
IP configuration from the robot LAN port:
Note that the LAN interface corresponding to the connection between the master and slave robot cannot be configured with the same IP address; otherwise, IP address conflicts may occur and the communication cannot be normal. In addition, the LAN interface between the master and slave robot control cabinets should be directly connected by network cables as much as possible, and the connection by routing and other methods may lead to the reduction of communication quality and affect the use of the final multi-machine collaboration function.
Master robot communication configuration#
The user needs to determine and configure the robot as the main control end during the use of the multi-machine collaboration function, as shown in the following figure:
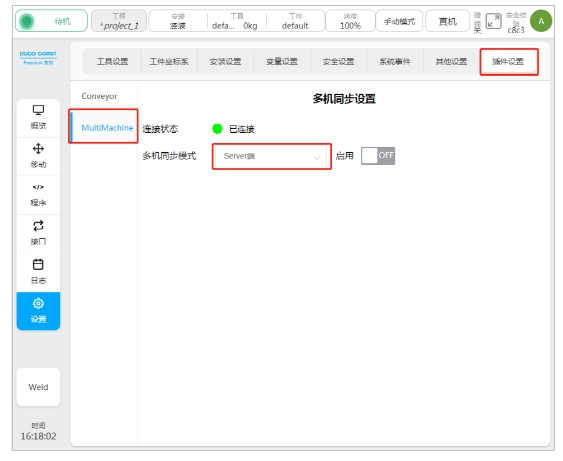
Communication configuration from the robot#
The user needs to determine the robot as the slave controlled end during the use of the multi-machine collaboration function and configure it, as shown in the following figure:
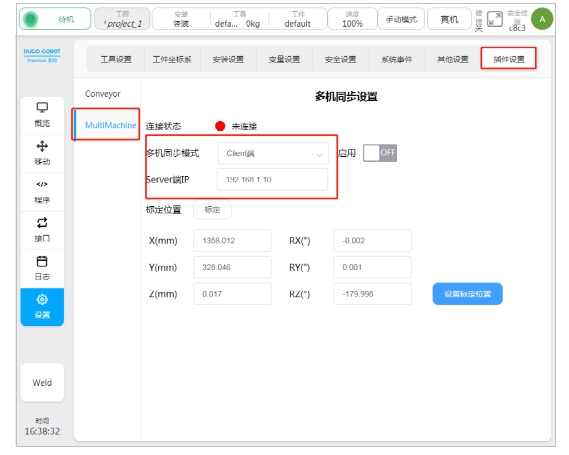
It should be noted that the slave robot needs to correctly configure the IP address of the LAN port of the master robot corresponding to the connected control end, so as to realize the communication between the master and slave. After the slave robot is correctly configured, the multi-machine collaboration function of the slave robot can be enabled to confirm whether the communication is correctly connected, as shown in the following figure:
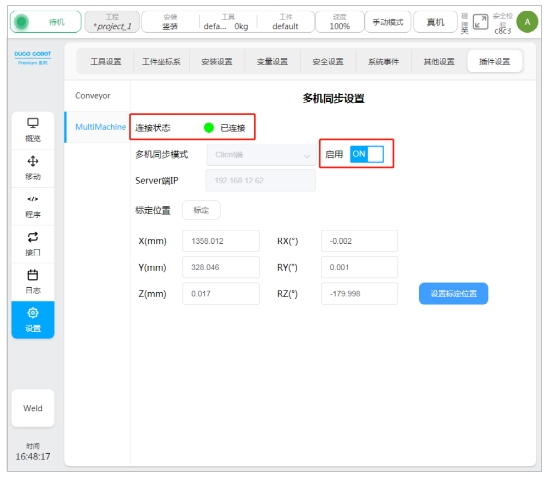
For slave robot, if communication is normal, the connection status indicator will light up.
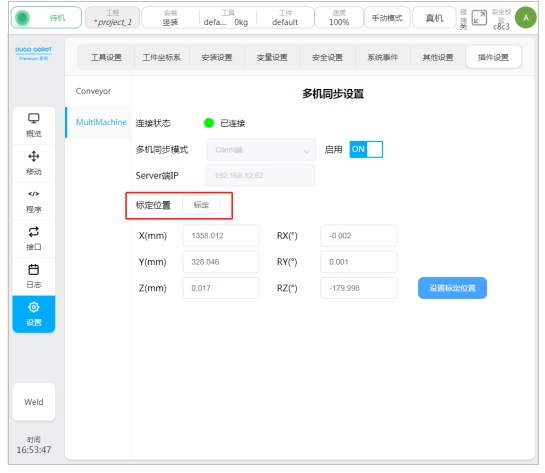
Master and slave calibration#
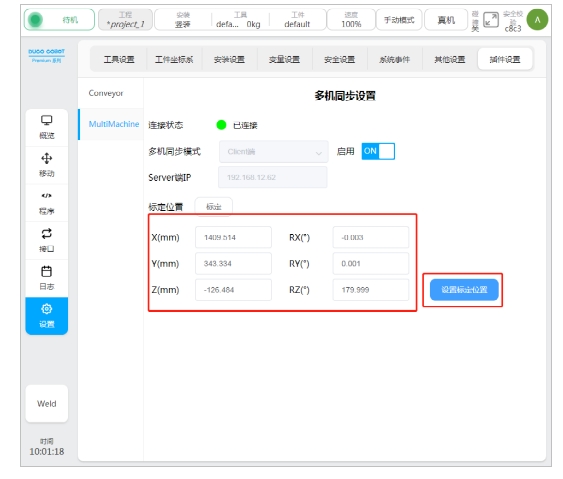
After completing the communication configuration of the master-slave robot and confirming that the connection has been established normally, the multi-machine collaboration function can be used only after the master-slave installation position and pose relationship of the slave robot are calibrated. As shown in the picture below:
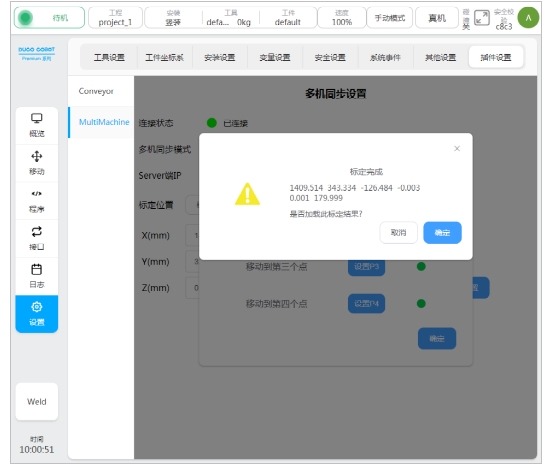
In the calibration process, the robot tool needs to be switched to the current tool, and the tool center of the master and slave robot needs to be moved to the same point in space respectively, and recorded. After repeating the above process 4 times, the calibration of the relative installation pose relationship between the current master and slave robot can be completed. As shown in the picture below:
Illustration: (master and slave robot tools move to the same point in space)
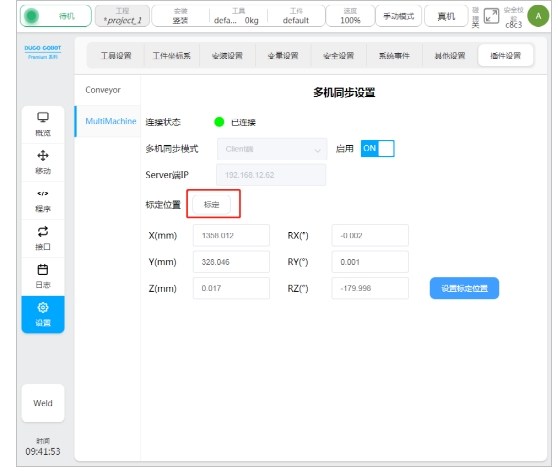
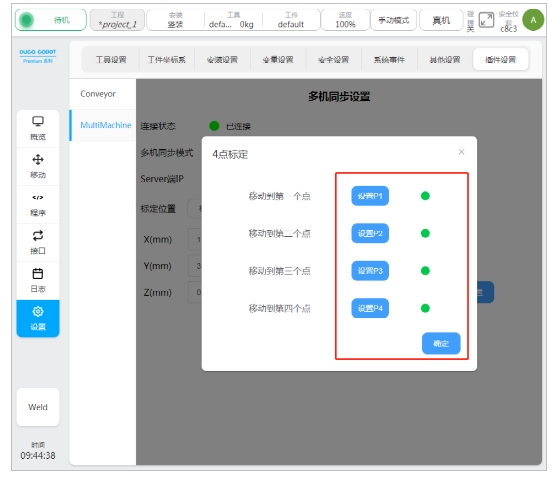
After confirming the successful configuration of the calibration point of the master-slave relationship for four times, click OK to obtain the description relationship between the base coordinate system of the slave robot and the base coordinate system of the master robot, and fill the results into the configuration parameters to take effect. As shown in the picture below: