การบำรุงรักษาความปลอดภัย#
เบรกปลดด้วยมือ#
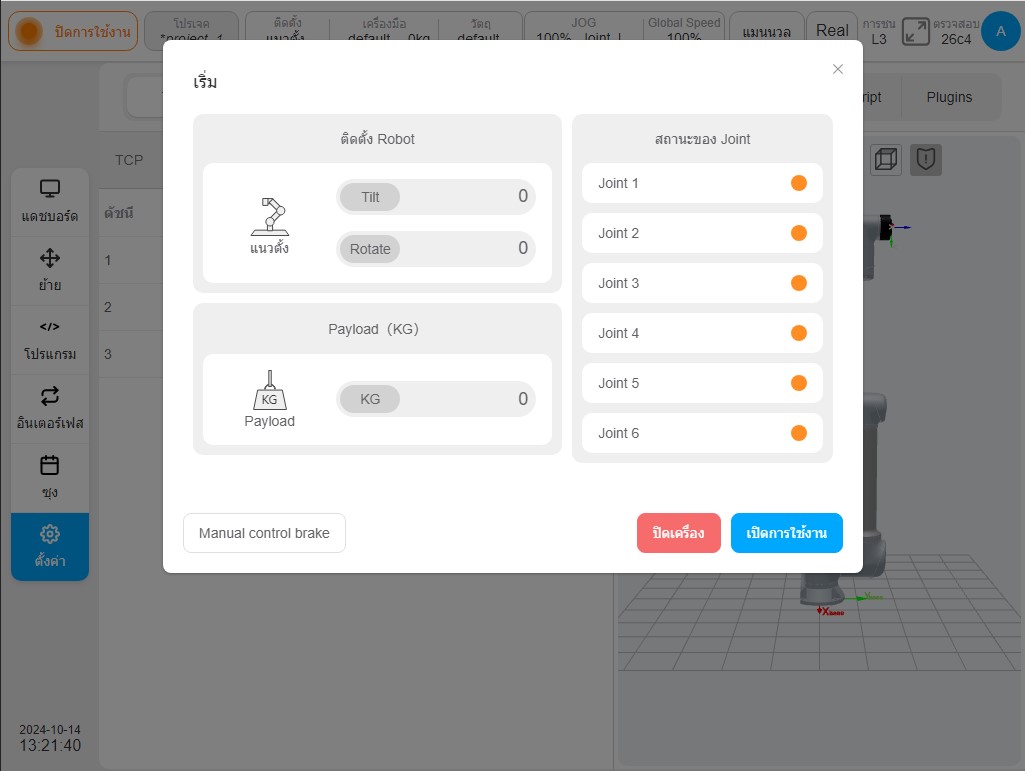
ในบางกรณี ผู้ใช้จะต้องปลดเบรกที่ข้อต่อเดียวด้วยตนเอง เมื่อหุ่นยนต์เปิดอยู่แต่ไม่ได้เปิดใช้งาน ทางเข้าสำหรับปลดเบรกด้วยตนเองจะปรากฏในหน้าเริ่มต้นดังที่แสดงในรูปภาพ
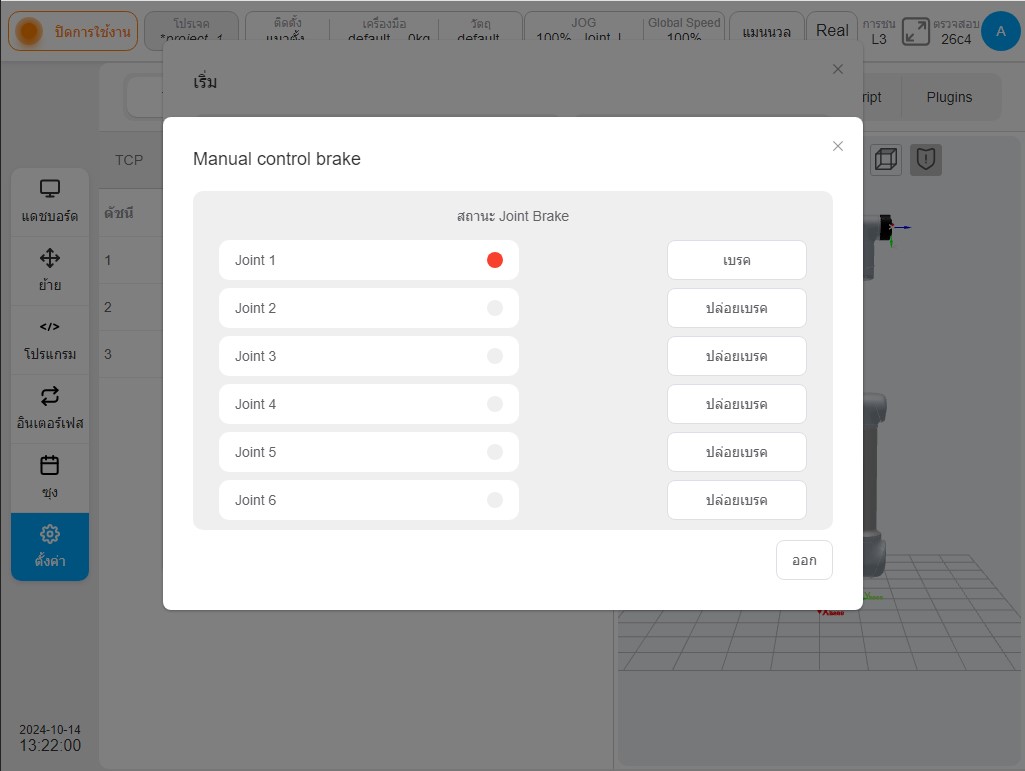
คลิกเพื่อเข้าสู่หน้าเบรกปลดด้วยมือดังที่แสดงในรูปภาพ ด้านซ้ายของหน้าแสดงสถานะเบรกของข้อต่อแต่ละข้อ โดยสีเทาแสดงว่าเบรกปิดอยู่ สีแดงแสดงว่าเบรกถูกปลดแล้ว ด้านขวาเป็นปุ่ม 'ควบคุมเบรก' โดยคลิกเพื่อควบคุมการเปิดและปิดเบรก
การทดสอบเบรก#
ผู้ใช้จะต้องดำเนินการทดสอบเบรกตามกำหนดเวลาเพื่อป้องกันความเสี่ยงที่เกิดจากความล้มเหลวของเบรกจากหุ่นยนต์ ระบบจะเตือนผู้ใช้เป็นระยะให้ทำการทดสอบเบรก โดยระยะเวลาการเตือนเริ่มต้นคือทุก ๆ 30 วัน
เมื่อเวลาที่ตั้งไว้ผ่านไปนับตั้งแต่การทดสอบเบรกครั้งล่าสุด กล่องโต้ตอบต่อไปนี้จะปรากฏขึ้นเพื่อแจ้งให้ผู้ใช้ทำการทดสอบเบรก ทางเข้าการทดสอบเบรกในหน้าเริ่มต้นจะแสดงด้วยจุดสีแดงเล็ก ๆ เพื่อเตือนผู้ใช้
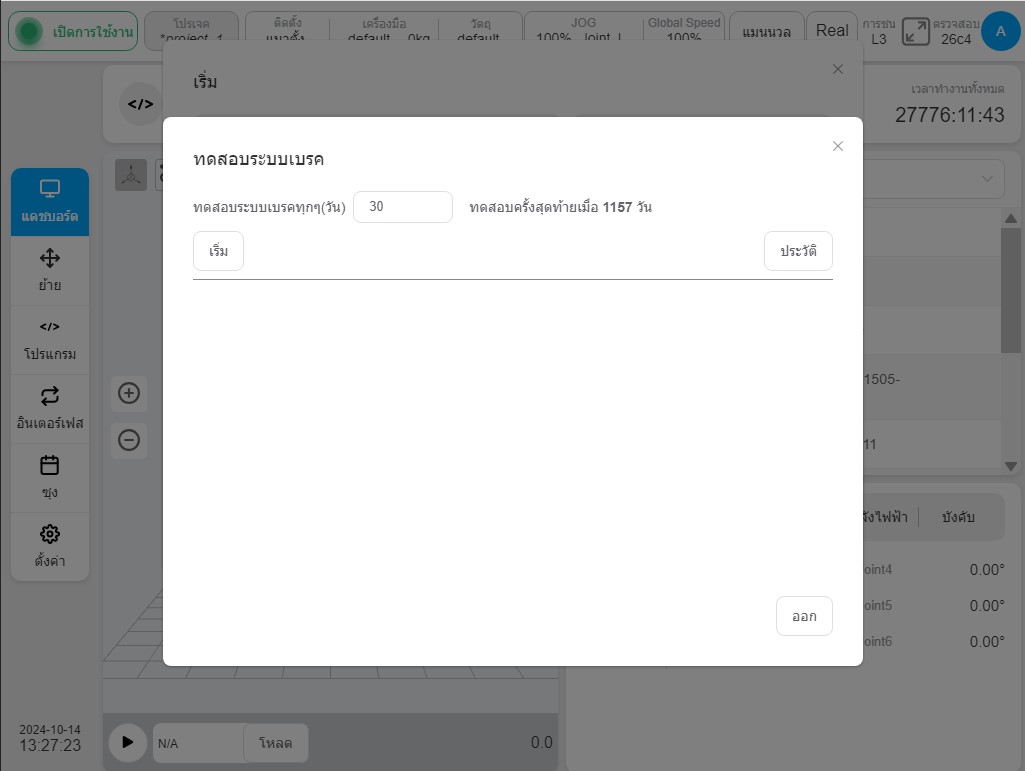
เมื่อเปิดใช้งานหุ่นยนต์ ทางเข้าฟังก์ชันการทดสอบเบรกจะปรากฏขึ้นในหน้าเริ่มต้น คลิกปุ่มเพื่อเข้าสู่หน้าการทดสอบเบรกที่แสดงในรูปภาพ หน้านี้จะแสดงระยะเวลาการทดสอบเบรกและจำนวนวันนับตั้งแต่การทดสอบเบรกครั้งล่าสุด
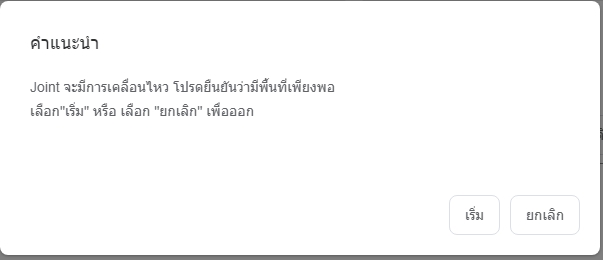
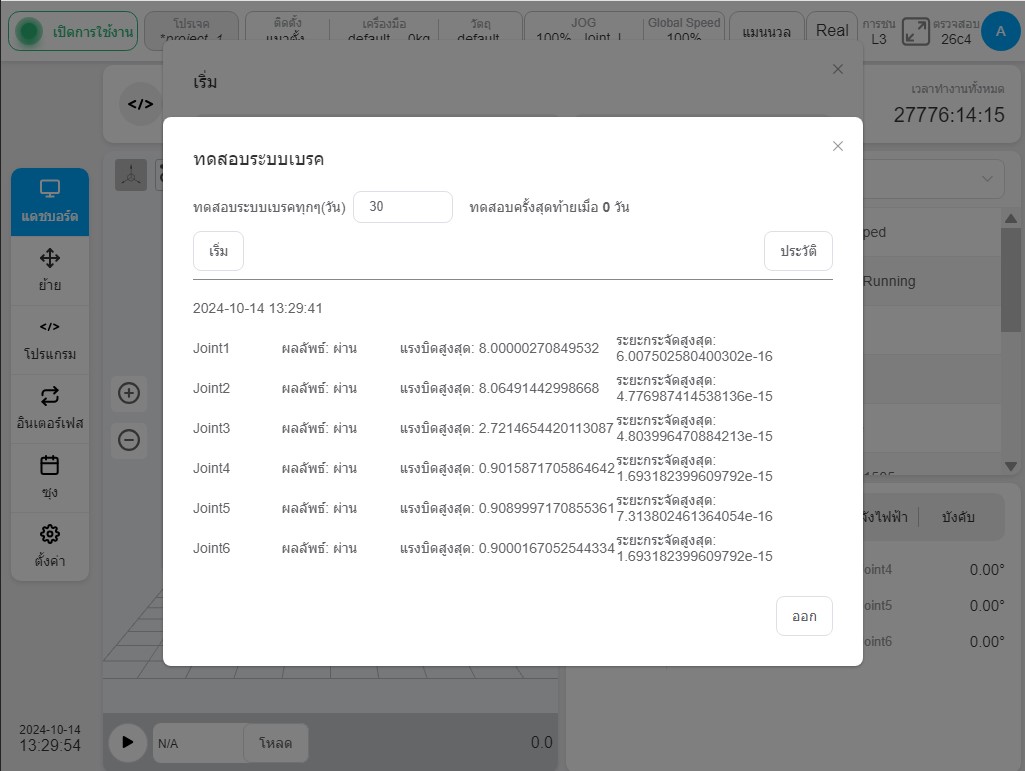
เมื่อคลิกปุ่ม 'เริ่มการตรวจจับ' กล่องโต้ตอบต่อไปนี้จะปรากฏขึ้น จากนั้นทำตามคำแนะนำเพื่อดำเนินการ ในกระบวนการตรวจจับ สามารถหยุดหรือหยุดกระบวนการตรวจจับได้ตลอดเวลา หลังจากการทดสอบเสร็จสิ้น ผลการทดสอบเบรกจะแสดงขึ้นมา
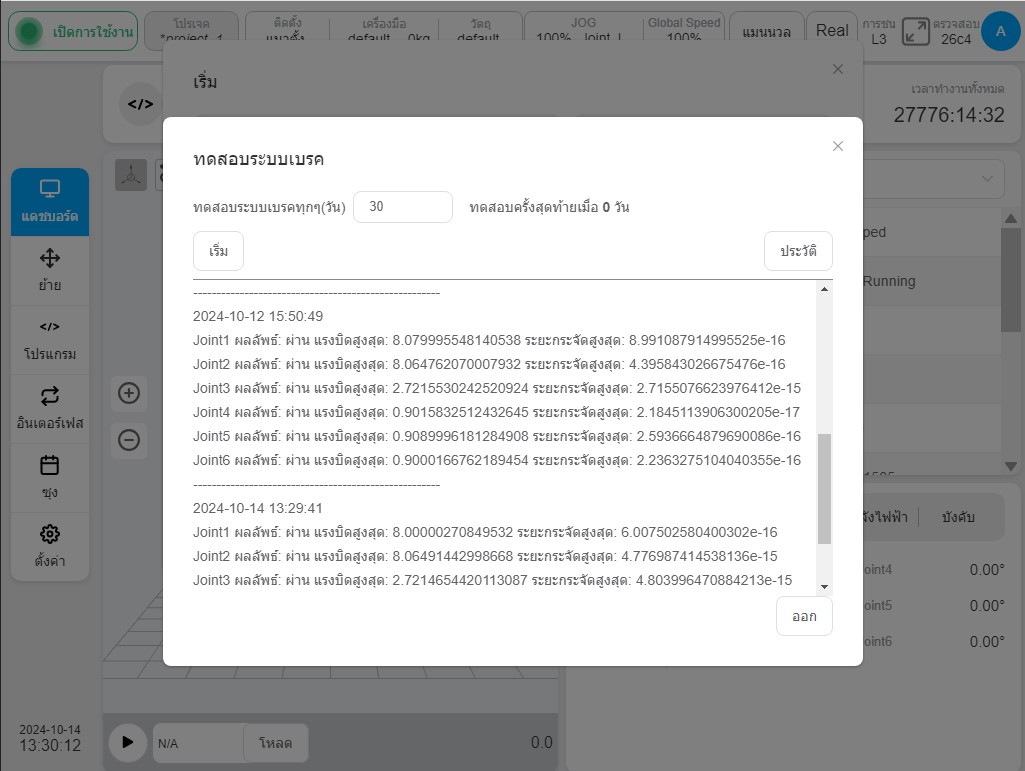
คลิกปุ่ม 'ข้อมูลประวัติ' เพื่อดูเวลาและผลการทดสอบเบรกครั้งก่อนๆ
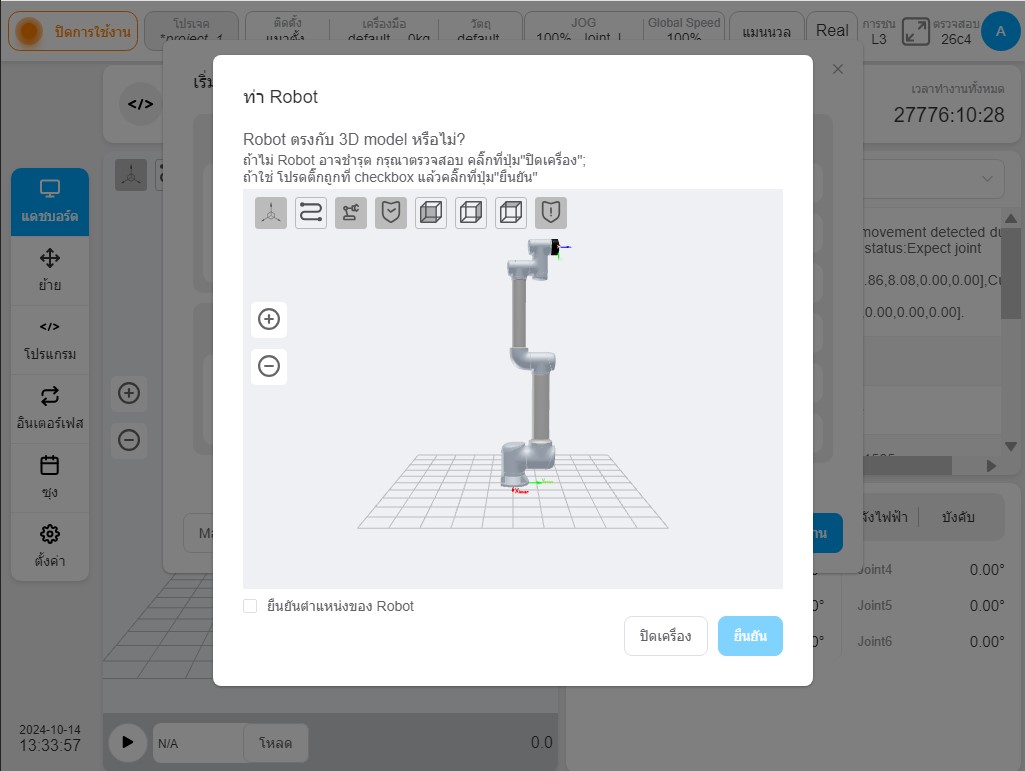
การตรวจสอบตำแหน่งข้อต่อเมื่อเปิดเครื่อง#
เมื่อหุ่นยนต์เปิดเครื่อง หุ่นยนต์จะตรวจจับว่าข้อต่อหมุนไปมากน้อยเพียงใดเมื่อปิดเครื่องเพื่อความปลอดภัยในการใช้งาน
หากข้อต่อหมุนไปมากน้อยเพียงใด กล่องโต้ตอบต่อไปนี้จะปรากฏขึ้น ผู้ใช้ยืนยันว่าท่าทางของหุ่นยนต์จริงสอดคล้องกับโมเดล 3 มิติบนอินเทอร์เฟซหรือไม่ หากใช่ ให้คลิก "ยืนยันว่าท่าทางของหุ่นยนต์ที่แสดงด้านบนสอดคล้องกับท่าทางจริง" จากนั้นคลิกปุ่ม "ยืนยัน" เพื่อดำเนินการเปิดเครื่องต่อ หากไม่เป็นเช่นนั้น ให้คลิกปุ่ม "ปิดเครื่อง" เพื่อตัดการเชื่อมต่อแหล่งจ่ายไฟของหุ่นยนต์และติดต่อเจ้าหน้าที่บำรุงรักษา