涂胶工艺包简介#
涂胶应用中,通常需要机器人与涂胶直接通讯,以降低通讯延时,从而达到更好的涂胶质量。涂胶工艺包分为三大部分,适配说明、设备通讯方式与工艺包安装与卸载。
适配说明#
机器人的版本信息,可以在机器人上电后,在“关于”界面中查询到。“关于”界面的打开方式,请见《DUCO CORE-用户手册》第7章节。
V1.0版本及以上的涂胶工艺包,需要保证机器人的软件版本在V3.3.0及以上。
涂胶系统包括涂胶定量机、线扫激光、视觉检测三部分。具体内容请见如下表格:
设备名称 |
厂商 |
通讯方式 |
备注 |
|---|---|---|---|
涂胶定量机 |
南京苏上 |
DeviceNet |
使用DeviceNet通讯需要设置波特 率与安装终端电阻,详情请见《 涂胶定量机连接》章节 |
Profinet |
使用Profinet通讯需要额外配置 Profinet主站模块。 |
||
存融 |
Ethernet/IP |
使用Ethernet/IP通讯需要额外配置 Ethernet/IP主站模块 |
|
线扫激光 |
唐山英莱 |
TCP/IP |
|
苏州全视 |
TCP/IP |
||
北京创想 |
TCP/IP |
||
视觉检测 |
易思维 |
Profinet |
使用Profinet通讯需要额外配置 Profinet主站模块。 |
瑞沃斯 |
Profinet |
使用Profinet通讯需要额外配置 Profinet主站模块。 |
设备通讯方式#
DeviceNet#
使用DeviceNet下的CAN的通讯时,需要参考《协作机器人用户手册(硬件部分)》,参考涂胶说明书,将两者的CAN通讯接口对接,为保证通讯质量,通常需要在接口处并联一个120Ω的终端电阻以消除信号反射。
1、查询《协作机器人用户手册(硬件部分)》,找到CAN通讯接口,如下图所示:
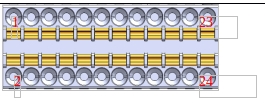
编号 |
信号定义 |
编号 |
信号定义 |
|---|---|---|---|
1 |
AI1(可配置模拟量输入1) |
2 |
AG(模拟地) |
3 |
AI2(可配置模拟量输入2) |
4 |
AG(模拟地) |
5 |
AO1(可配置模拟量输出1) |
6 |
AG(模拟地) |
7 |
AO2(可配置模拟量输出2) |
8 |
AG(模拟地) |
9 |
24V |
10 |
RC1(远程开关ON+) |
11 |
0V |
12 |
PowerON(远程开关ON-) |
13 |
A+(INC信号A相+) |
14 |
RC2(远程开关OFF+) |
15 |
A-(INC信号A相-) |
16 |
Power0FF(远程开关OFF-) |
17 |
A-(INC信号A相-) |
18 |
CAN_L |
19 |
B-(INC信号B相-) |
20 |
CAN_H |
21 |
Z+(INC信号C相+) |
22 |
485_B |
23 |
Z-(INC信号C相-) |
24 |
485_A |
从表格中可知,CAN通讯使用引脚18,20
2、 涂胶侧,需要参考涂胶说明书,将涂胶的控制模式调至机器人控制模式,并选用相应的通讯协议。以适配南京苏上涂胶为例:
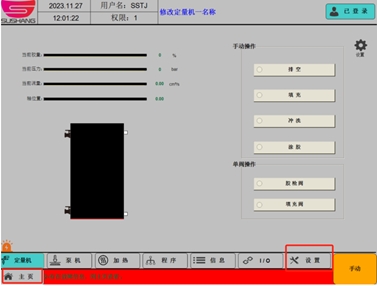
苏上胶机登录账号:SSTJ, 密码:1;
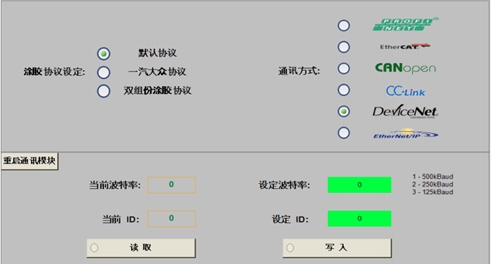
点击“主页”,点击“设置”,点击“现场总线”。选择“DeviceNet”通讯。
(注:DeviceNet通讯,需要苏上工程师提供支持)
3 、DeviceNet,可配置波特率,配置信息与CCI页面显示同步;通讯波特率:支持125kbps、250kbps、500kbps三种波特率。需要注意的是,机器 人与涂胶的波特率需要设置一致,才能实现通讯。
Profinet#
使用Profinet通讯需要额外配置Profinet主站模块。
工艺包安装与卸载#
涂胶工艺包文件为“dispense.plugin”的插件。安装步骤如下所示:
1、 将涂胶工艺包放入U盘,U盘要求格式为FAT32
2、 机器人系统启动后,在机器人控制柜上,USB接口处插入U盘。

3、 使用admin账户登录机器人系统。

4、点击用户头像

,选择系统设置。
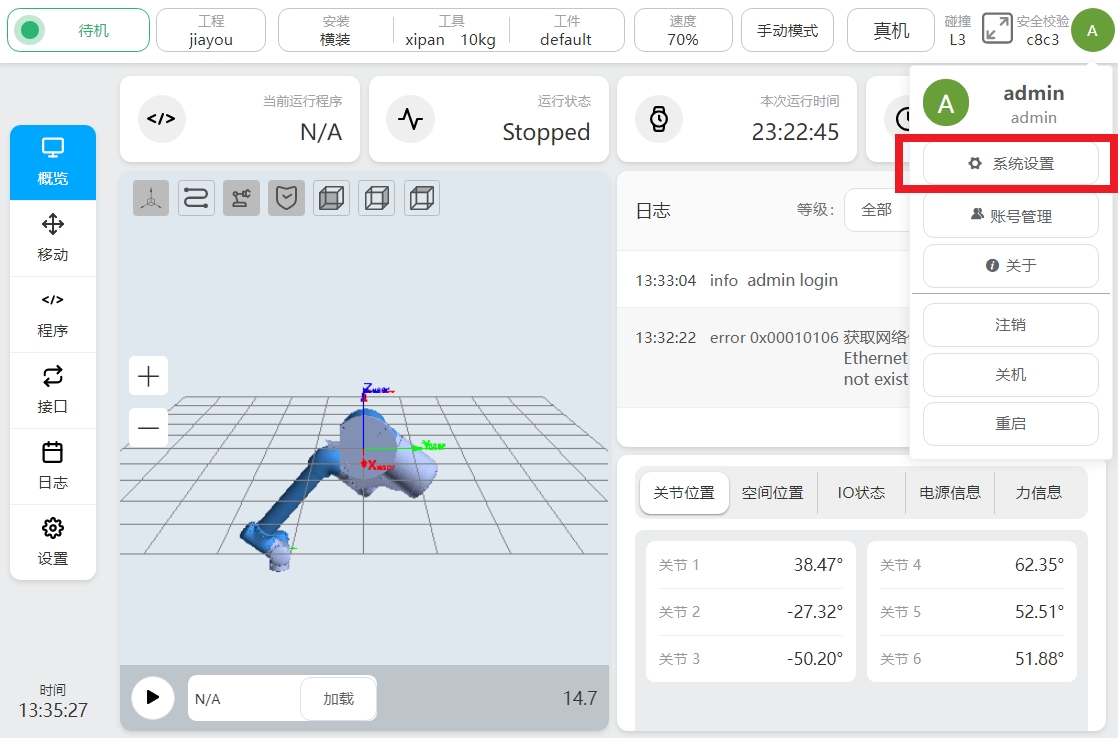
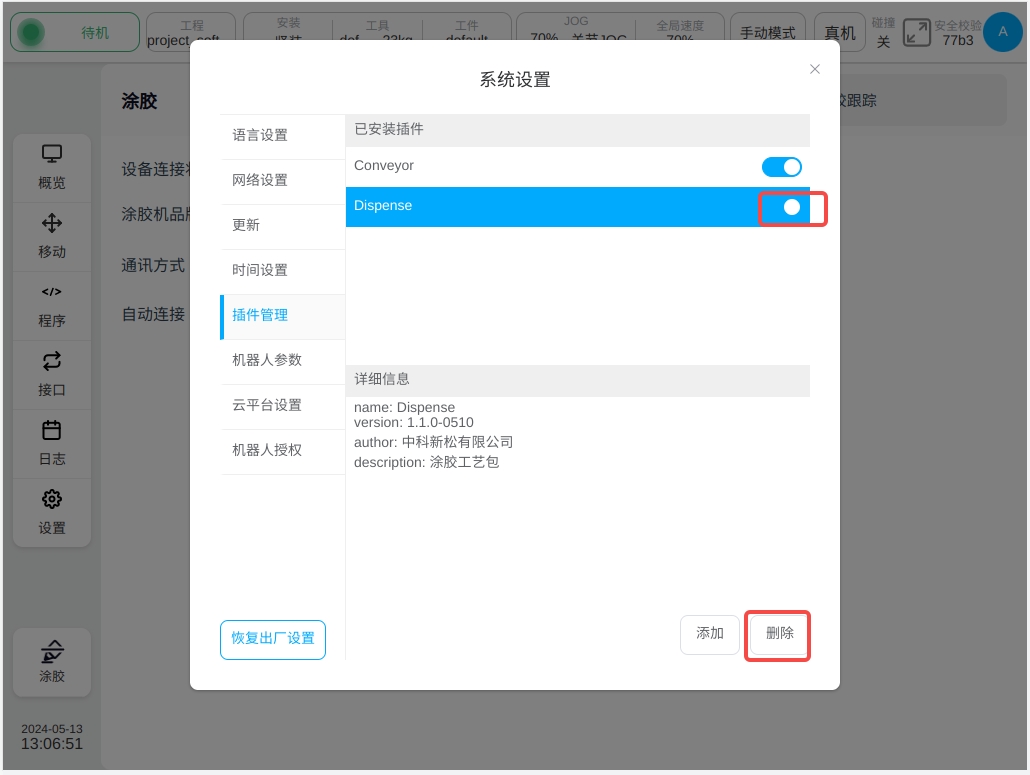
5、选择插件管理功能。

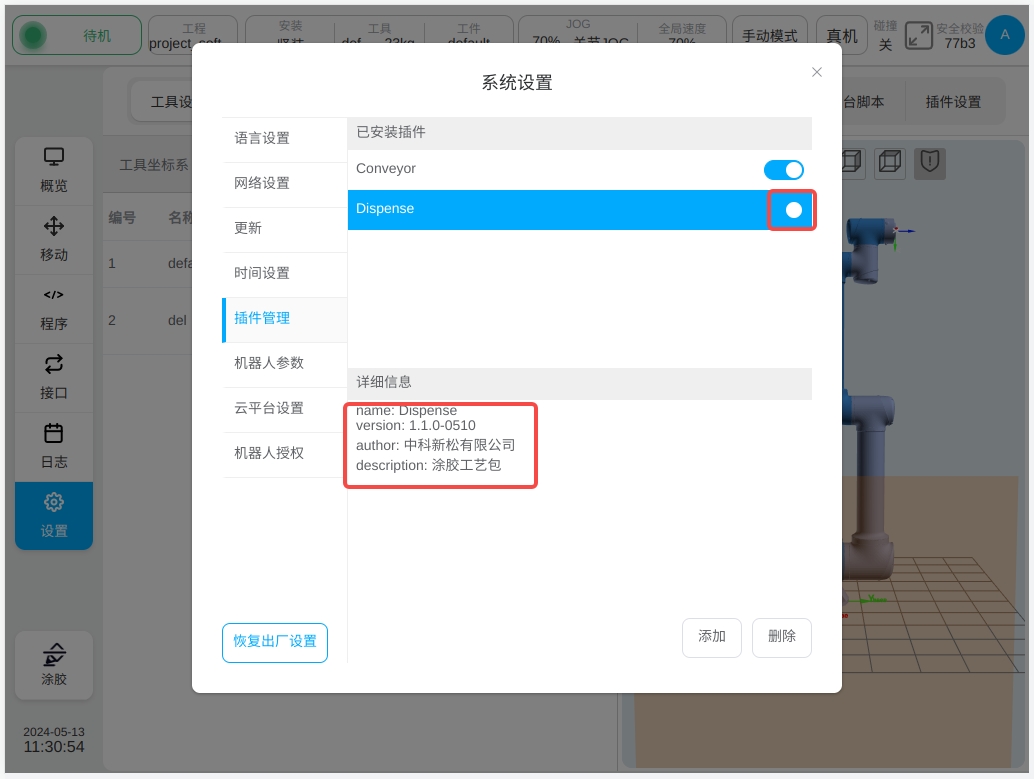
6、点击添加按钮。

7、选择U盘并从文件列表中,找到并选择“dispense.plugin”插件包。

8、插件包安装完成后,如下图所示,将在标注处显示插件包安装完成。在标注处,新安装的插件包将默认为使能。在标注处,将显示当前插件包的名称,版本信息等内容。
9、涂胶工艺包安装完成后,将在主页面的左下方,出现工艺包设置入口。
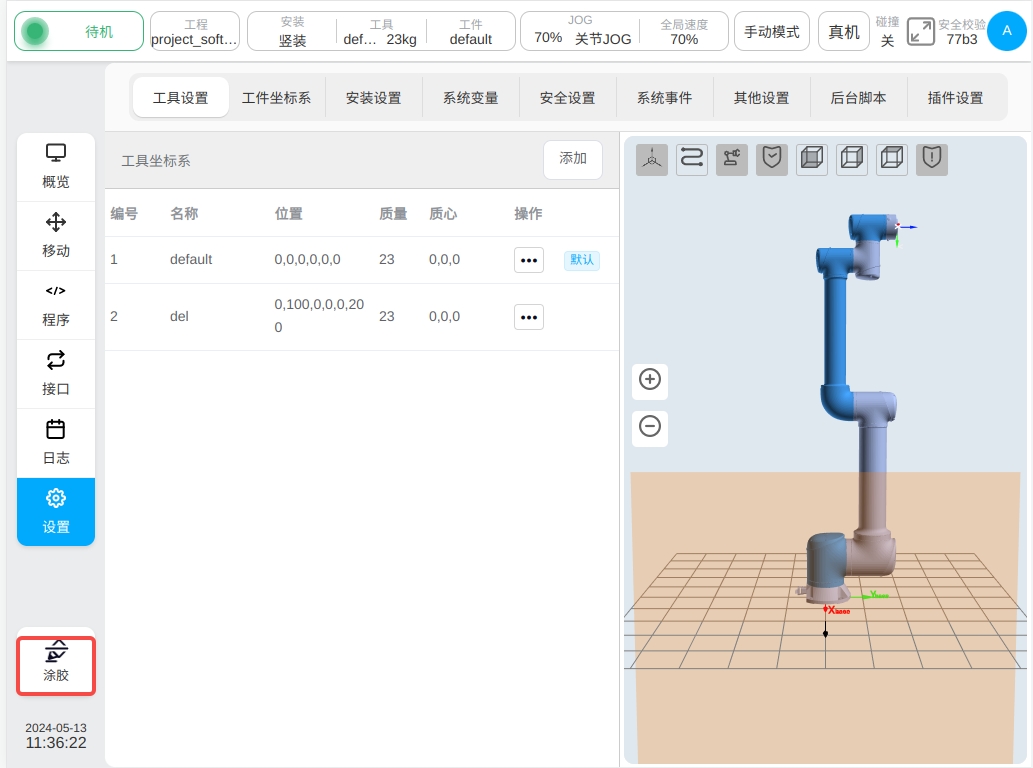
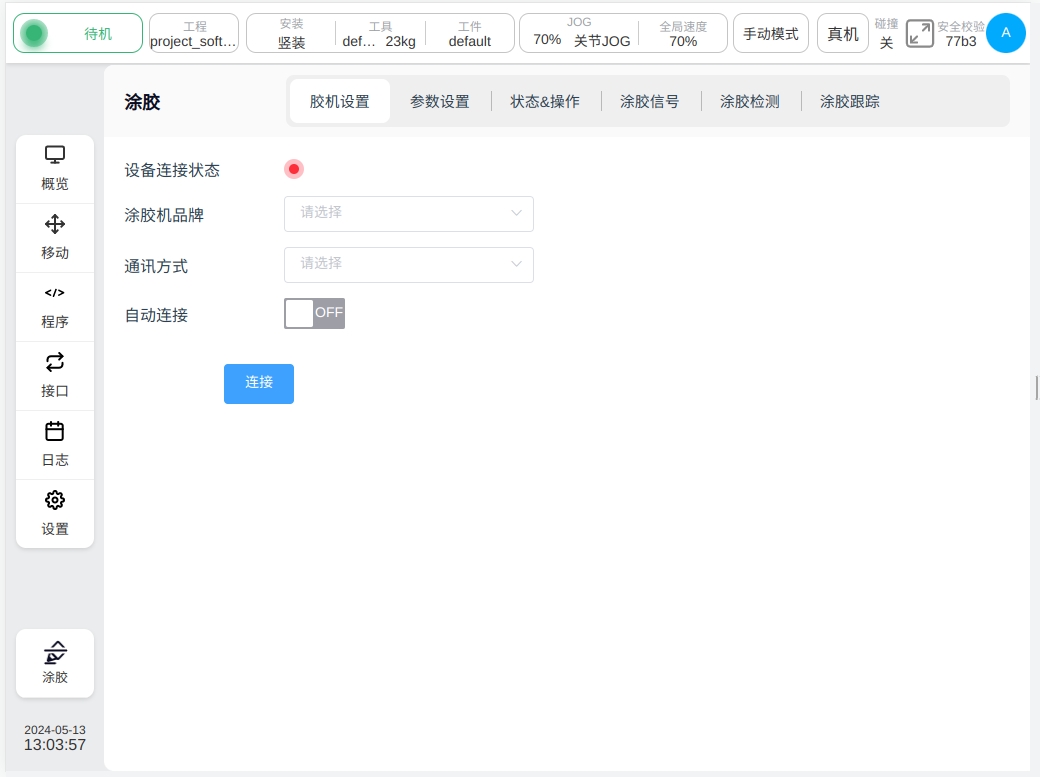
10、点击此工艺包设置入口按钮,即可进入涂胶工艺包设置页面。
11、已安装好的涂胶工艺包,可以通过关闭使能信号的方式,暂时失效。删除插件会弹出“保留数据”和“清空数据”。