涂胶编程#
涂胶编程主要包括涂胶色块、编程脚本、程序示例。
涂胶色块#
涂胶色块主要包括:Dispinit、DispPurge、DispSetProg、DispSetParam、DispProcessStart、DispProcessEnd、DispErrorCheck、DispWaitPrepressure、ResetVisionDetect、RobotStart、RobotStop、CameraStart、CameraStop、WaitVisionReady、Setpart;其中ResetVisionDetect、RobotStart、RobotStop、CameraStart、CameraStop、WaitVisionReady、Setpart为涂胶检测色块。
Dispinit#
Dispinit主要用来设置涂胶系统的初始化。
配置页面可参考下图。
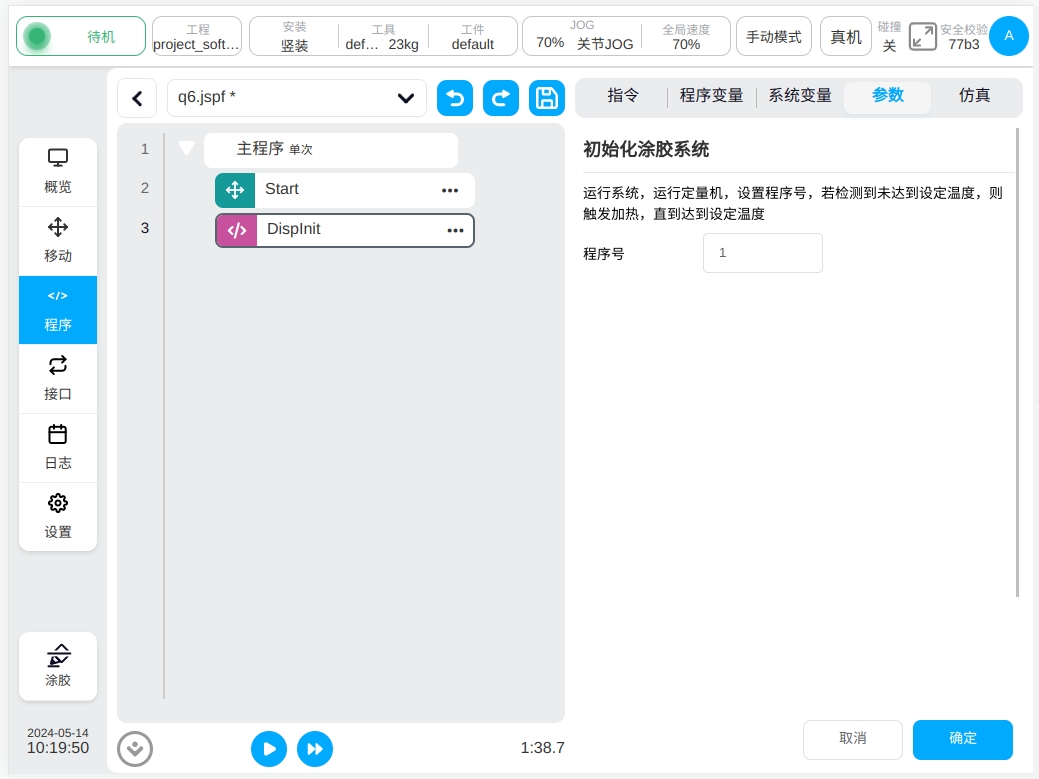
有如下设置项:程序号
机器人通过程序号去选择胶机定义的参数。点击确定,参数页面保存;点击取消,回到指令页面。
DispPurge#
DispPurge主要用来设置清洗胶枪。
配置页面可参考下图。
此模块功能:在运行程序前,检查胶机的请求清洗信号,然后把胶枪里面的胶排空。点击确定,参数页面保存;点击取消,回到指令页面。
DispSetProg#
DispSetProg主要用来设置涂胶程序号
配置页面可参考下图。
有如下设置项:程序号
机器人通过程序号去选择胶机定义的参数。点击确定,参数页面保存;点击取消,回到指令页面。
DispSetParam#
DispSetParam主要用来设置涂胶参数号。
配置页面可参考下图。
有如下设置项:参数号
机器人通过参数号去选择胶机定义的参数。点击确定,参数页面保存;点击取消,回到指令页面。
DispProcessStart#
DispProcessStart主要用来设置涂胶工序开始。
配置页面可参考下图。
程序周期启动,并等待直到达到预压之后。点击确定,参数页面保存;点击取消,回到指令页面。
DispProcessEnd#
DispProcessEnd主要用来设置涂胶工序结束。
配置页面可参考下图。
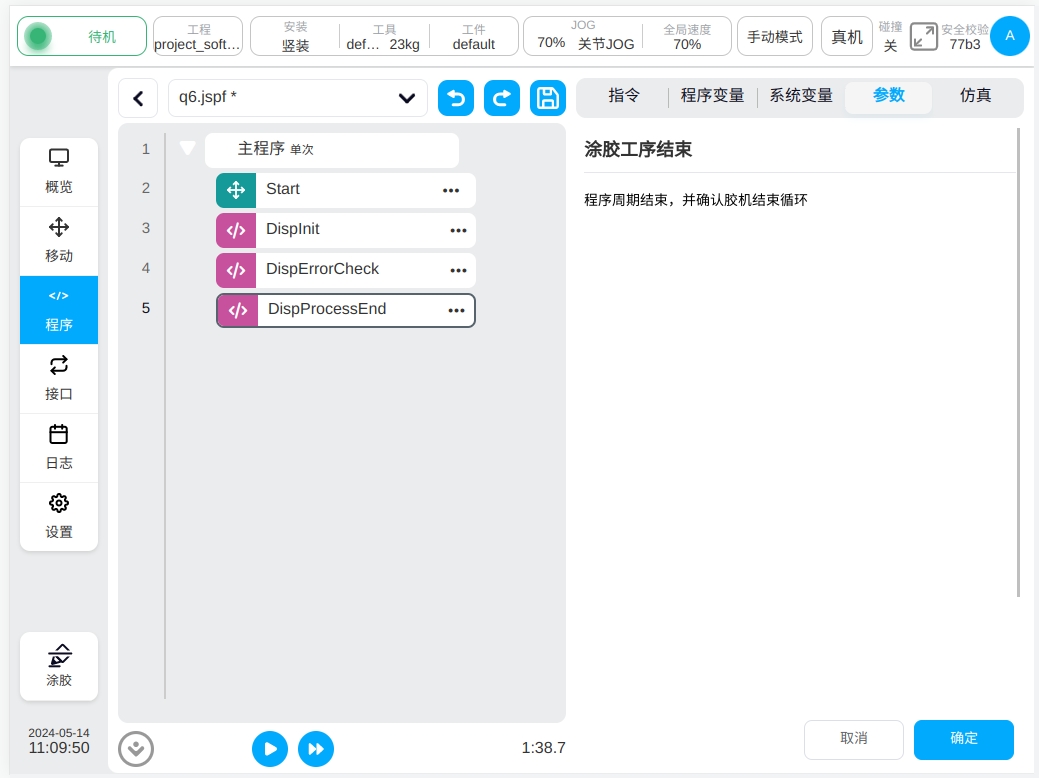
程序周期结束,并确认胶机结束循环。点击确定,参数页面保存;点击取消,回到指令页面。
DispErrorCheck#
DispErrorCheck主要用来设置涂胶故障处理。
配置页面可参考下图。

检查是否存在故障,若存在故障,则进行故障复位,1s后检测仍有故障,则提示。点击确定,参数页面保存;点击取消,回到指令页面。
DispWaitPrepressure#
DispWaitPrepressure主要用来设置等待胶机达到预压之后。
配置页面可参考下图。

等待胶机达到预压。点击确定,参数页面保存;点击取消,回到指令页面。
ResetVisionDetect#
ResetVisionDetect主要用来设置视觉检测信号复位。
配置页面可参考下图。
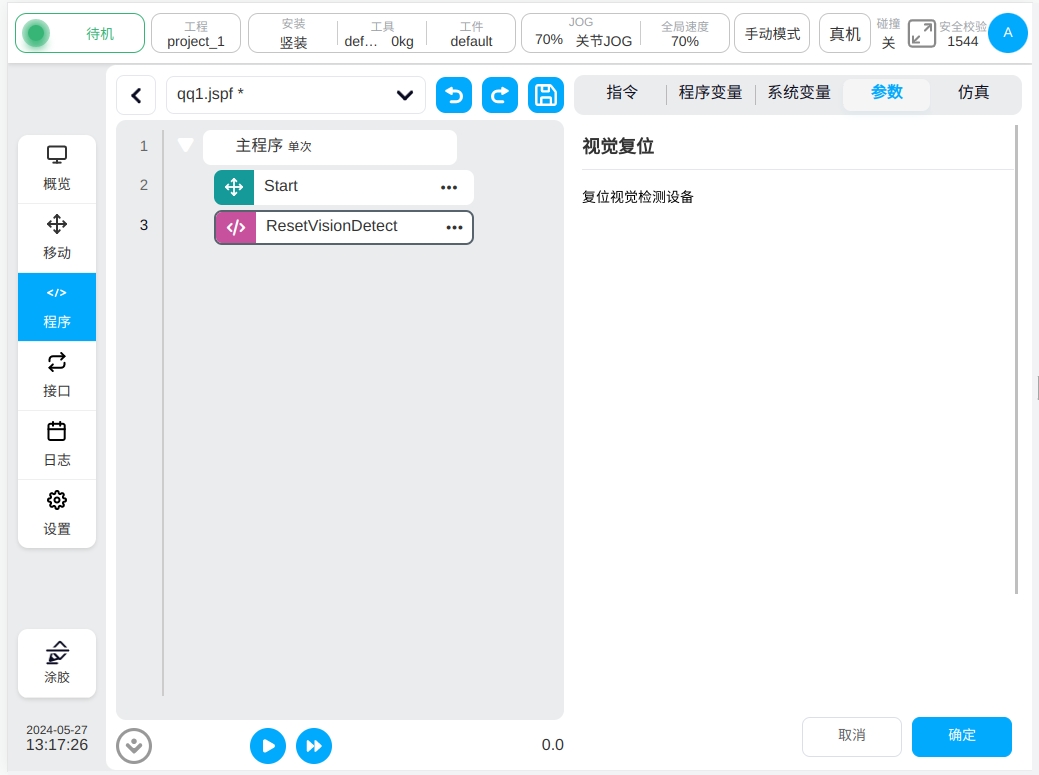
复位视觉检测设备。点击确定,参数页面保存;点击取消,回到指令页面。
RobotStart#
RobotStart主要用来设置视觉检测运行。
配置页面可参考下图。
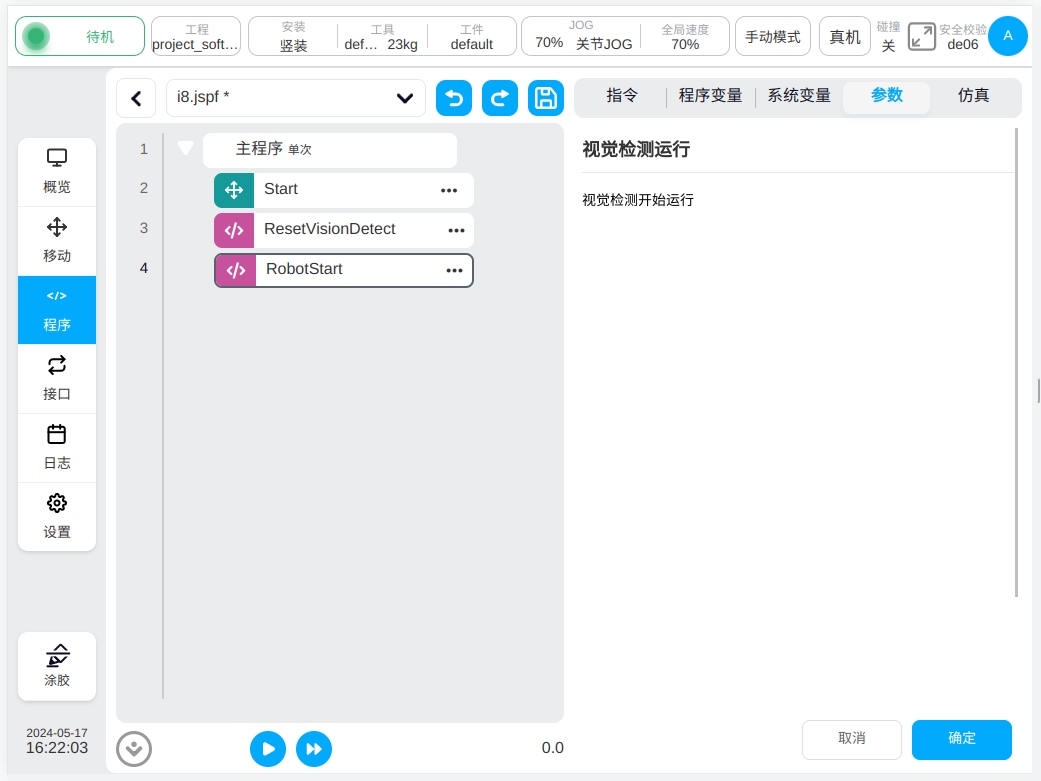
视觉检测开始运行。点击确定,参数页面保存;点击取消,回到指令页面。
RobotStop#
RobotStop主要用来设置涂胶结束。
具体参数页面可参考下图。
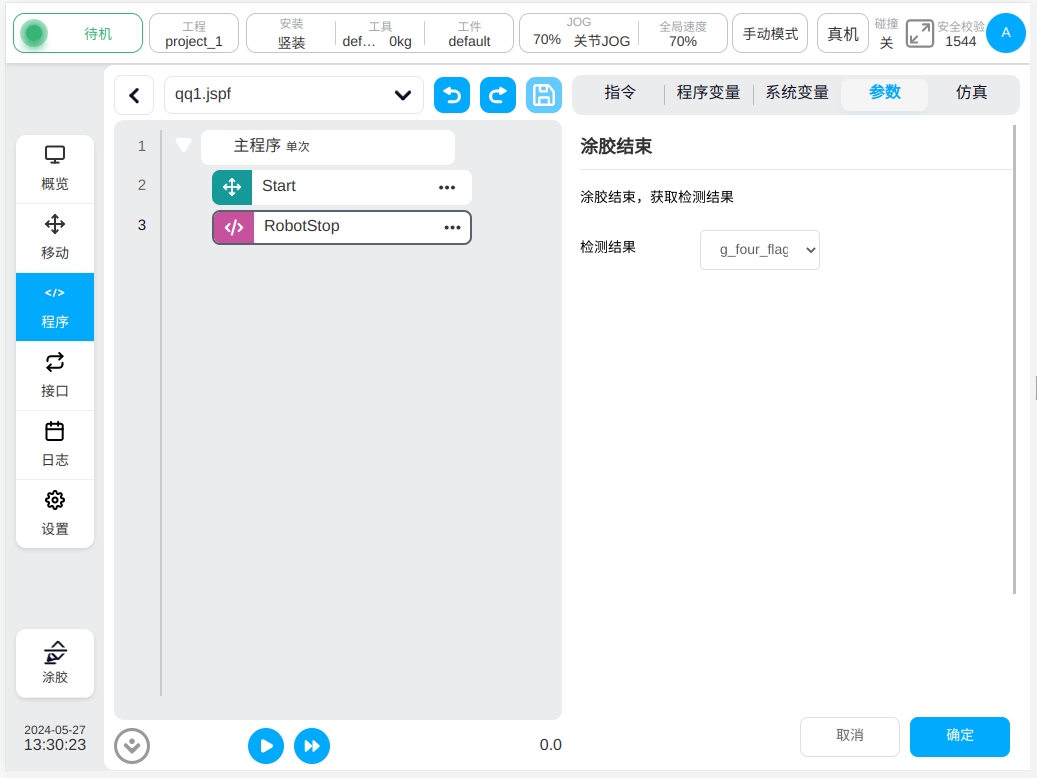
有如下设置项:检测结果,下拉框可选择程序变量和全局变量。
检测结果编辑完成,点击确定,保存参数页面;点击取消,回到指令页面。
CameraStart#
CameraStart主要用来设置开始拍照检测
配置页面可参考下图。
通知涂胶检测系统开始拍照检测。点击确定,保存参数页面;点击取消,回到指令页面。
CameraStop#
CameraStop主要用来设置停止拍照检测。
配置页面可参考下图。
通知涂胶检测系统停止拍照检测。点击确定,保存参数页面;点击取消,回到指令页面。
WaitVisionReady#
WaitVisionReady主要用来设置等待视觉检测设备准备就绪。
配置页面可参考下图。
一直等待直到视觉检测设备准备就绪。点击确定,保存参数页面;点击取消,回到指令页面。
Setpart#
Setpart主要用来设置车型和零件编号。
配置页面可参考下图。
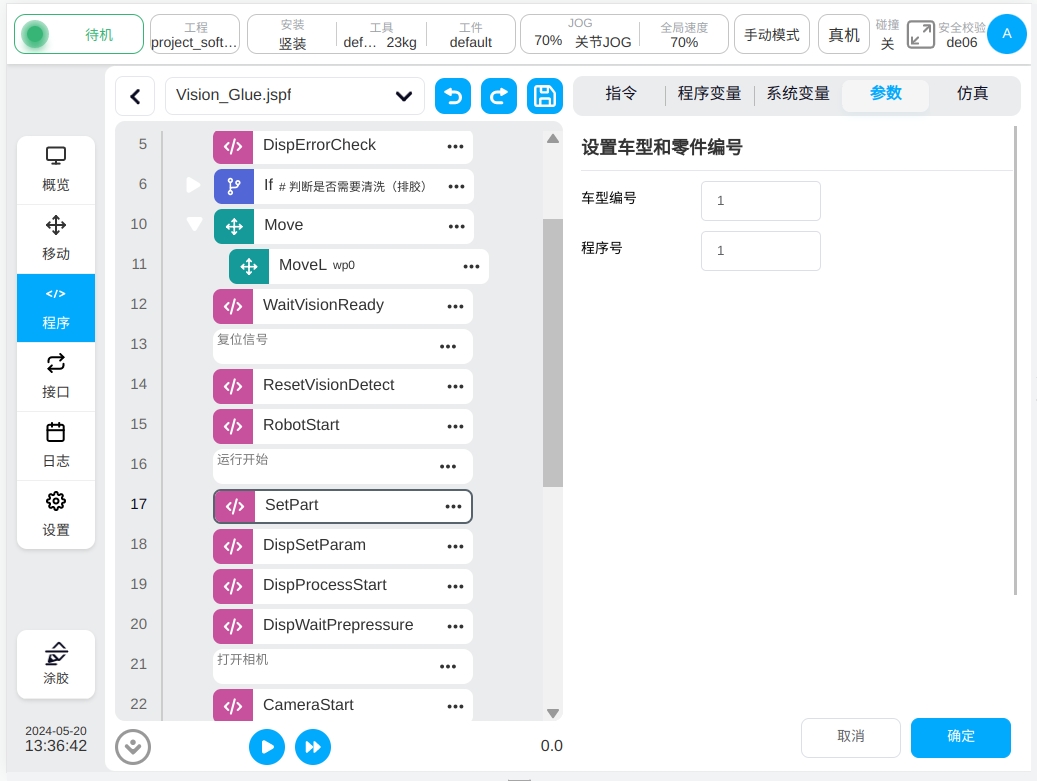
有如下设置项:车型编号和程序号。
机器人通过车型编号和程序号去选择胶机定义的参数。点击确定,保存参数页面;点击取消,回到指令页面。
编程脚本#
涂胶工艺包会增加如下脚本,可以在使用脚本编程时调用
_plugin_dispense.init(progNo)
涂胶初始化
_plugin_dispense.check_purge_request()
检查是否需要清洗
_plugin_dispense.purge()
清洗
_plugin_dispense.set_prog_no(progNo)
设定程序号
_plugin_dispense.set_param_no(paramNo)
设定参数号
_plugin_dispense.check_prepressure()
检查是否达到预压
_plugin_dispense. wait_prepressure()
等待预压
_plugin_dispense.start_process()
工序开始
_plugin_dispense.end_process()
工序结束
_plugin_dispense.fill()
填充
_plugin_dispense.check_error()
检查故障
_plugin_dispense.reset_error()
故障复位
_plugin_dispense.check_reset_error()
检查并复位错误
_plugin_dispense.robot_start()
开始涂胶
_plugin_dispense.robot_stop()
结束涂胶
_plugin_dispense.camera_start()
触发拍照
_plugin_dispense.reset_vision()
复位
_plugin_dispense.set_part_code(code)
设置零件编号
_plugin_dispense.set_vision_sensor_code(code)
设置传感器编号
_plugin_dispense.set_car_type(code)
设置车型编号
_plugin_dispense.get_vision_check_ok()
视觉检测系统结果
_plugin_dispense.get_vison_ready()
视觉检测系统准备好
_plugin_dispense.calc_pose_from_raw(pose, laser)
根据激光及机器人当前位置计算寻位点坐标系
_plugin_dispense.get_laser_search_offset(type, pose_list)
计算三点四点寻位偏差
_plugin_dispense.three_offset(pose_list)
三点求旋转偏移坐标系
_plugin_dispense.four_offset(pose_list)
四点求旋转平移坐标系
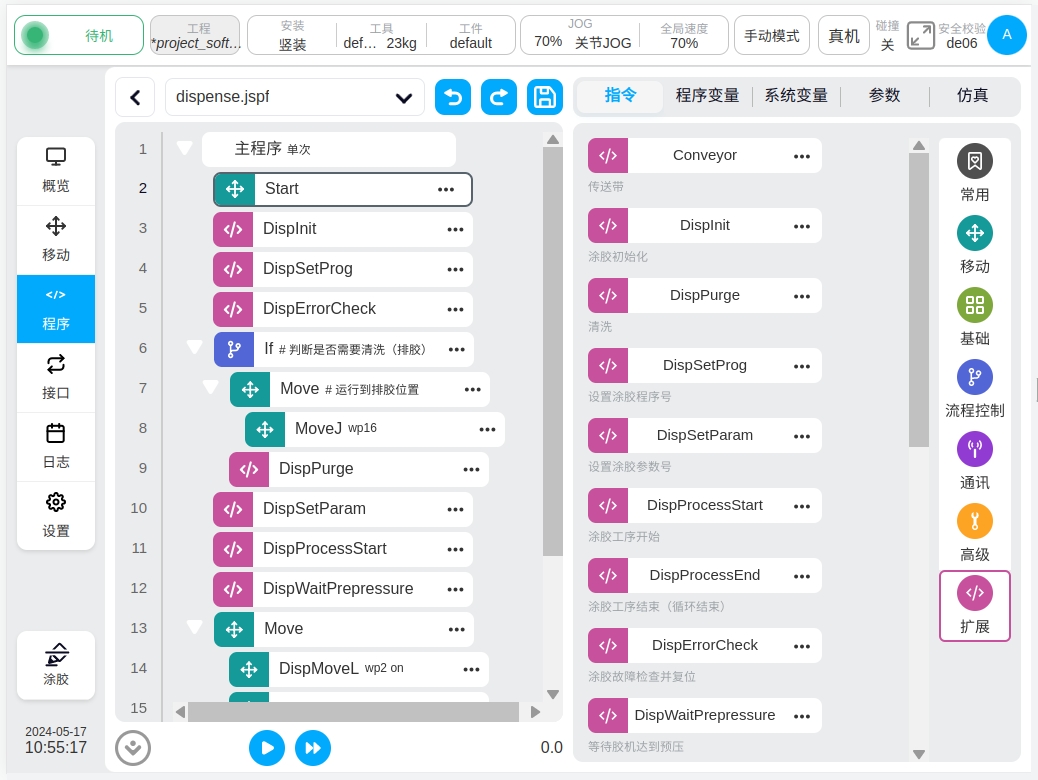
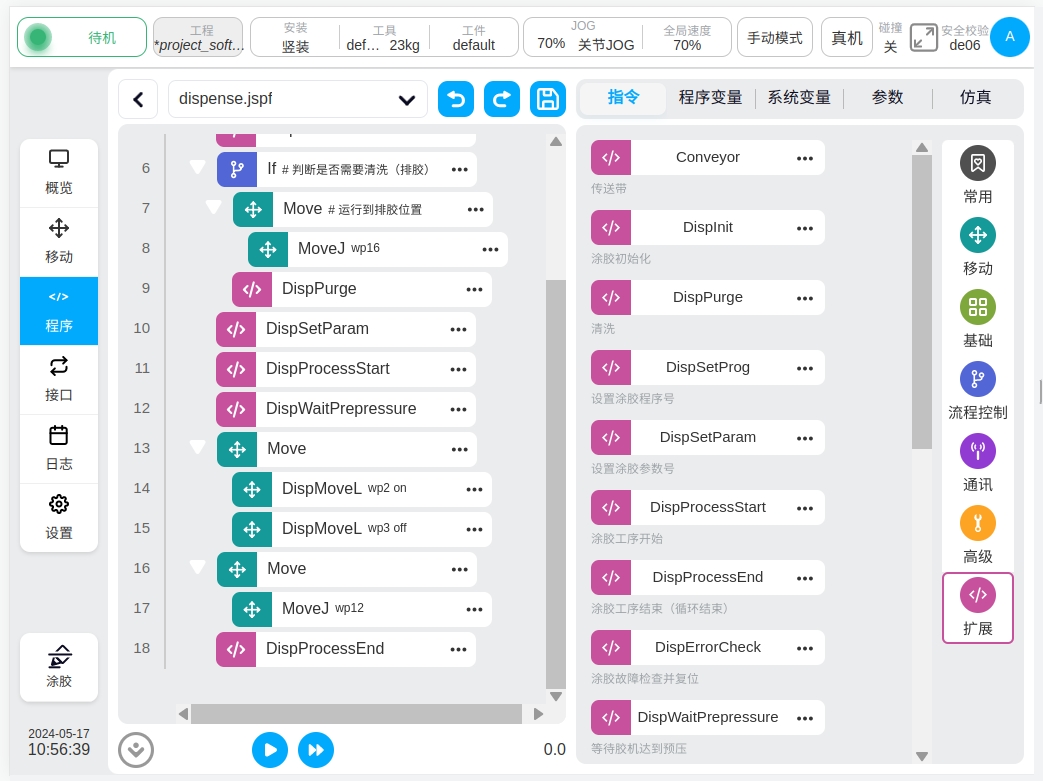
程序示例#
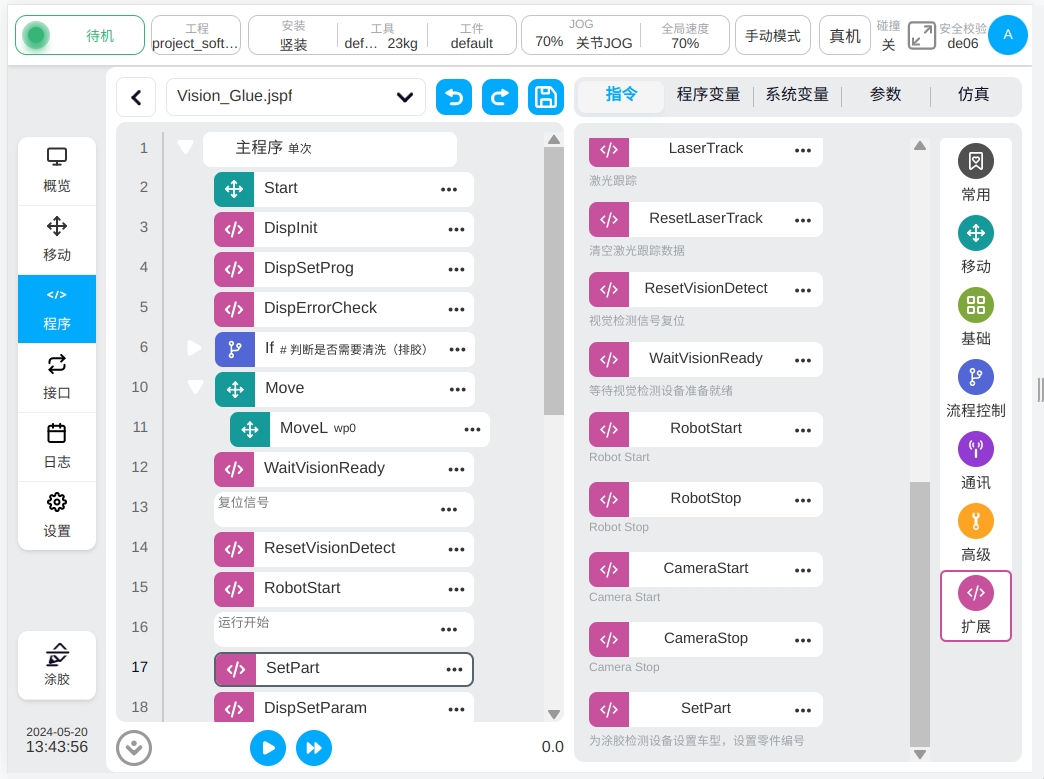
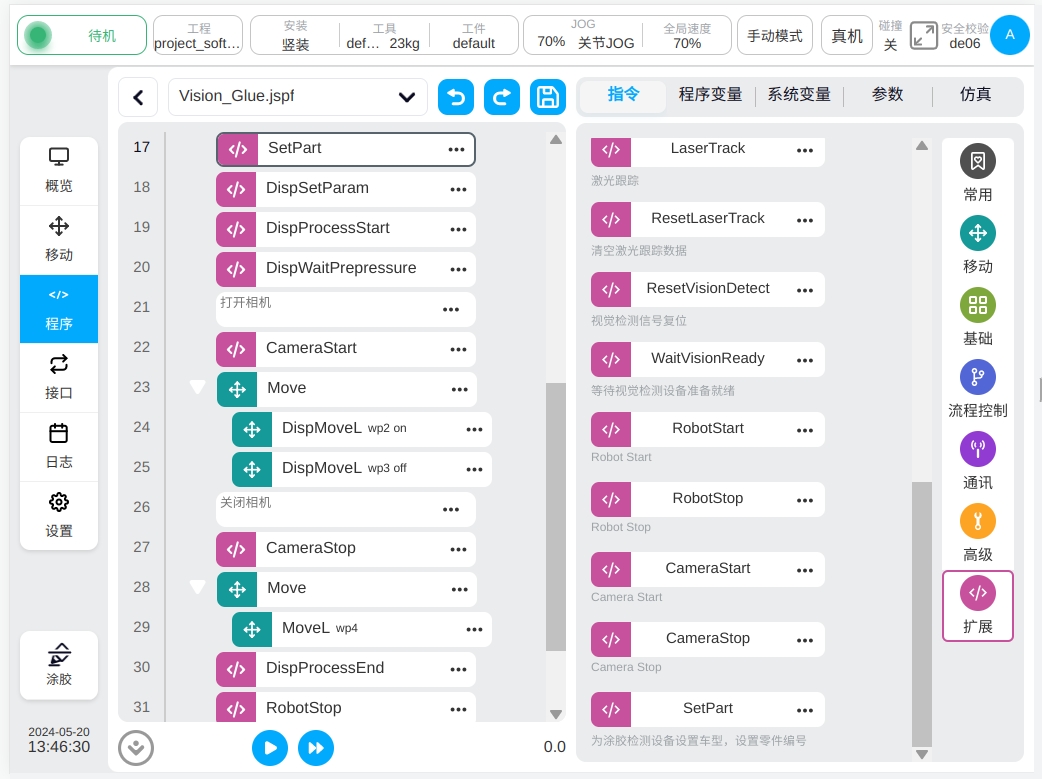
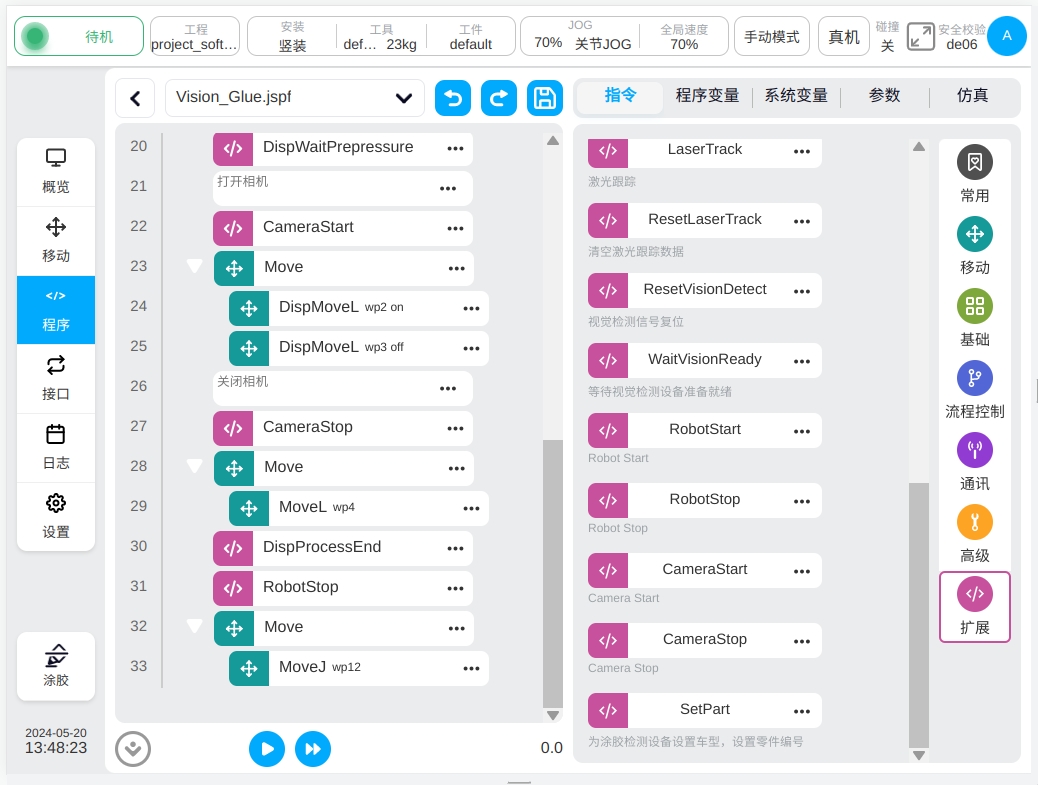
如下程序示例包含Dispinit、DispPurge、DispSetProg、DispSetPram、DispProcessStart、DispProcessEnd、DispErrorCheck、DispWaitPrepressure这八个模块,通过程序是否跑通验证模块的正确性。
如下程序示例包含涂胶检测ResetVisionDetect、RobotStart、RobotStop、CameraStart、CameraStop、WaitVisionReady、Setpart这七个模块,通过程序是否跑通验证模块的正确性。