末端力控简介#
功能目标#
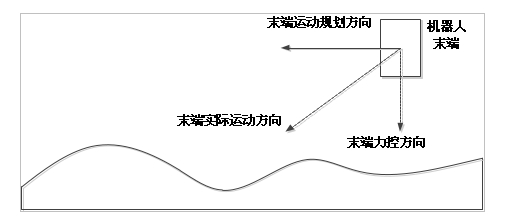
末端力控功能使得机器人可以通过力传感器对外界环境与外部工装进行力感知并进行力交互。用户通过选择使用末端力控功能,使得机器人末端可以在运动过程中根据用户设定的指定方向上的力大小与外部环境进行接触,尤其是在用户对机器人及其交互环境之间的绝对位置关系无法确定的情况下。末端力控功能适用的部分典型机器人应用包括:精密装配、打磨抛光、力性能检测、高精度负载辨识等。
使用限制#
用户选择使用末端力控功能时,需要注意以下使用限制:
机器人末端正确安装有六维力传感器并进行配置启用或机器人底座正确安装有底座六维力传感器并进行配置启用。
机器人末端所承受的总负载,包括末端传感器自身重量、安装在末端传感器上的工具及负载、以及机器人末端传感器,及工具负载与外界的接触力之和,不得超过机器人所规定的负载限制曲线。
当机器人末端力控功能启用时,机器人碰撞检测功能将失效,即使用户启用了碰撞检测功能。
当机器人末端力控功能启用时,机器人会在力控制方向上产生用户运动指令以外的运动,用户需要根据实际情况评估该类运动的安全性。