末端力控牵引#
功能简述#
用户选择使用末端力控牵引时,可以直接拖拽机器人末端在笛卡尔空间中移动。相较于机器人自身牵引示教功能,末端力控牵引让用户可以控制机器人末端在指定坐标系中沿着指定方向移动,并限制非牵引方向上不产生位移。用户通过选择使用末端力控牵引,可以获得更高的牵引自由度及精度。
功能限制#
用户使用末端力控牵引功能时,需要注意如下使用限制:
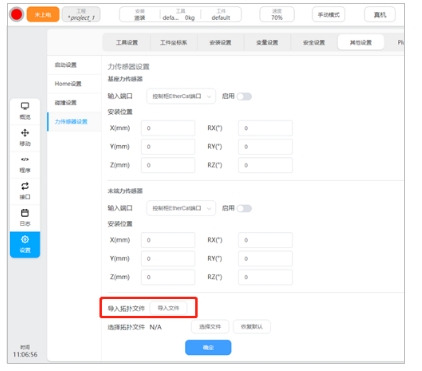
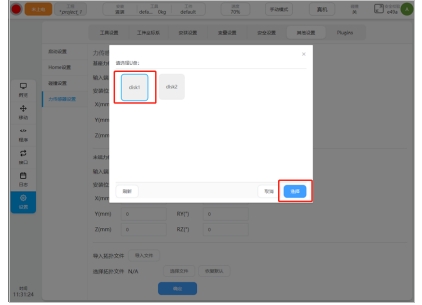
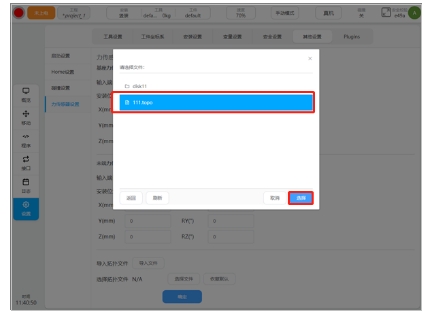
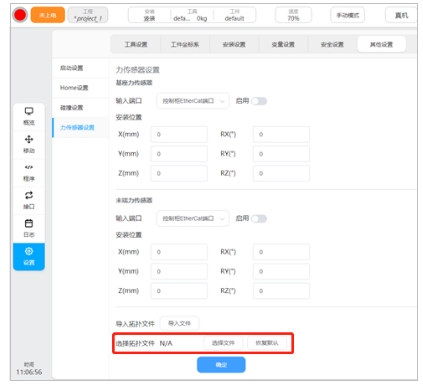
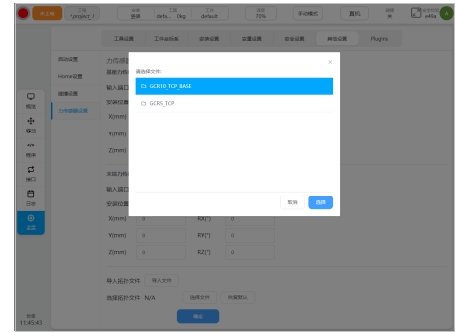
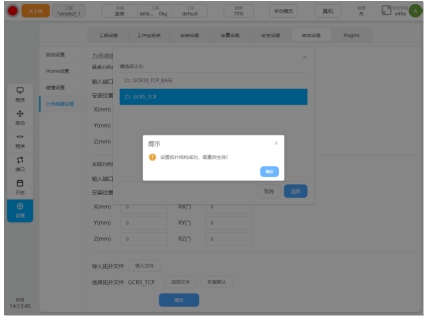
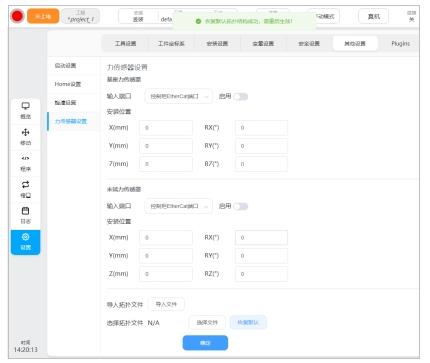
该功能仅在力传感器被正确配置并启用时可使用。
在启用功能前,用户需根据实际安装在力传感器上及机器人末端的工具及负载情况进行工具负载质心参数的配置。
若选择使用末端力传感器,在功能启用后,用户仅可通过拖拽安装在末端力传感器上的工具及负载进行牵引,拖拽机器人其他部位不会产生任何移动。
若选择使用底座力传感器,在功能启用后,用户可通过拖拽机器人任意位置进行牵引,用户作用在机械臂上的力会被视为作用在机器人末端工具上的力。
功能操作界面#
用户可以在移动界面中进入末端力控牵引功能操作界面,如下图所示:
操作界面中包含:功能开启按钮、牵引方向开关以及牵引方向柔顺度调节。
牵引坐标系设置#
用户在使用末端力控牵引时,可以选择不同的坐标系进行牵引进行牵引。牵引坐标系的选择与机器人笛卡尔空间移动功能的坐标系选择方式相同,如下图所示:
用户在启用末端力控牵引后,选择的牵引平移方向X/Y/Z与牵引旋转方向RX/RY/RZ都会参考选取坐标系的对应方向。
牵引方向设置#
用户可以根据实际使用需求进行指定坐标系下的牵引方向开关,如下图所示:
当开启力控牵引功能时,仅激活的力控牵引方向上会根据产生移动,未激活方向上则不会产生位移。 当用户仅需要对平移方向X/Y/Z进行牵引时,可以使用平移模式操作按钮自动开启平移方向并关闭旋转方向,如下图所示:
当用户仅需要对旋转方向RX/RY/RZ进行牵引时,则可以用旋转模式操作按钮自动开启旋转方向并关闭平移方向,如下图所示:
当用户需要自行定义牵引方向开关时,则可以使用自定义模式。
牵引柔顺度设置#
用户使用力控牵引功能时,可以根据需求进行牵引柔顺度的设置,如下图所示:
增大牵引方向上的牵引柔顺度会使末端力控牵引使用过程中对应牵引方向上的最大可牵引速度增大,反之则会减小。在修改了末端力控牵引柔顺度并点击确定后参数即生效。
开启及退出牵引#
按住机器人末端T按钮,机器人则会进入末端力控牵引模式,如下图所示:
用户完成牵引功能使用时,松开末端T按钮或点击退出牵引按钮即可退出牵引。 为了避免机器人在退出牵引时末端遭受较大外力/力矩冲击,在点击退出牵引按钮时,机器人应尽可能处于静止状态。