力传感器集成#
传感器安装#
用户在使用机器人末端力控前,需要将力传感器安装在机器人系统上。用户可以选择集成末端力传感器或集成底座力传感器从而使用末端力控功能。
若选择使用末端力传感器,需要将末端力传感器安装在机器人末端法兰上,并正确连接力传感器与机器人末端法兰通讯接口及供电接口,并保证通讯线与供电线不会在机器人运动过程中发生缠绕、打结、过度弯折等会影响机器人及末端传感器正常工作的现象。
若选择使用底座力传感器,需要将机器人正确安装在机器人底座传感器上,并正确连接力传感器以机器人控制柜通讯接口及供电接口,并保证通讯子安与供电线不会与机器人及环境产生缠绕、打结、过度弯折等影响传感器正常工作的现象。
当控制器系统中同时集成有底座力传感器与末端力传感器时,系统默认优先会采用末端力传感器数据进行末端力控功能的执行。
力控插件安装#
用户在将使用机器人末端力控前,需要先安安装机器人力控插件,如下图所示:


用户在正确安装力控插件并启用后,机器人控制器界面左下角会显示力传感器配置图标,点击即可进入力传感器配置界面。
传感器集成配置#
点击界面左下角力传感器图标进入力传感器配置界面,点击上方通讯设置即可进入力传感器集成配置界面,如下图所示:
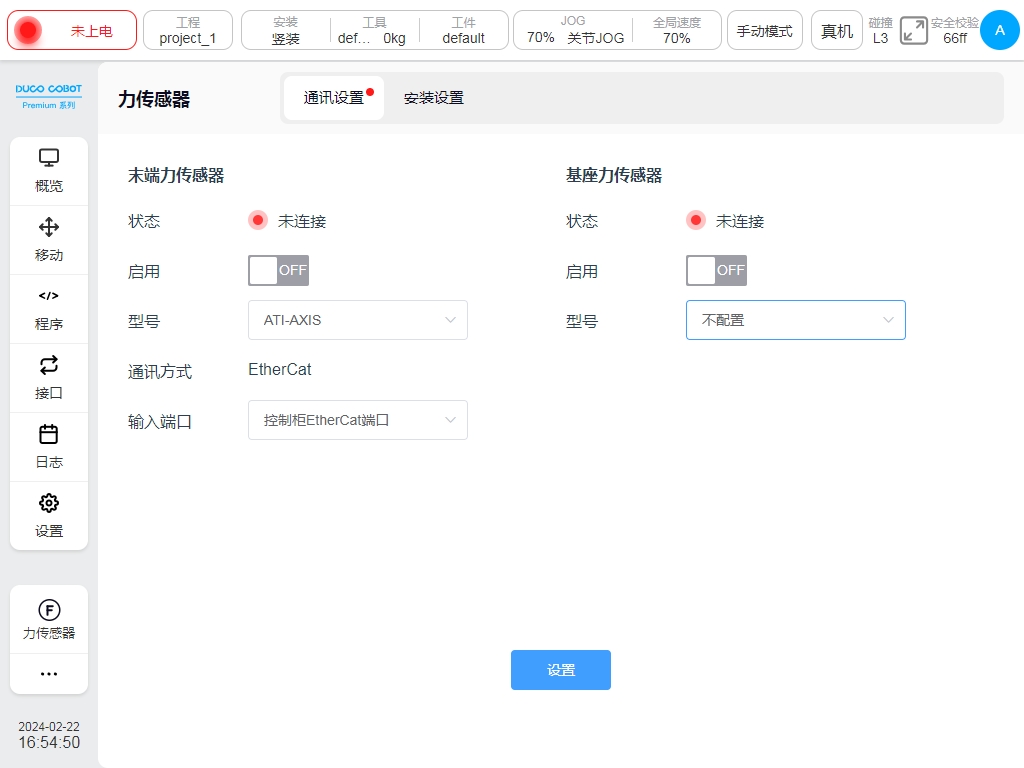
用户需根据实际情况,选择末端力传感器型号与基座力传感器型号。所有力传感器型号都分为两种:
官方适配型号;
其他型号;
官方适配型号
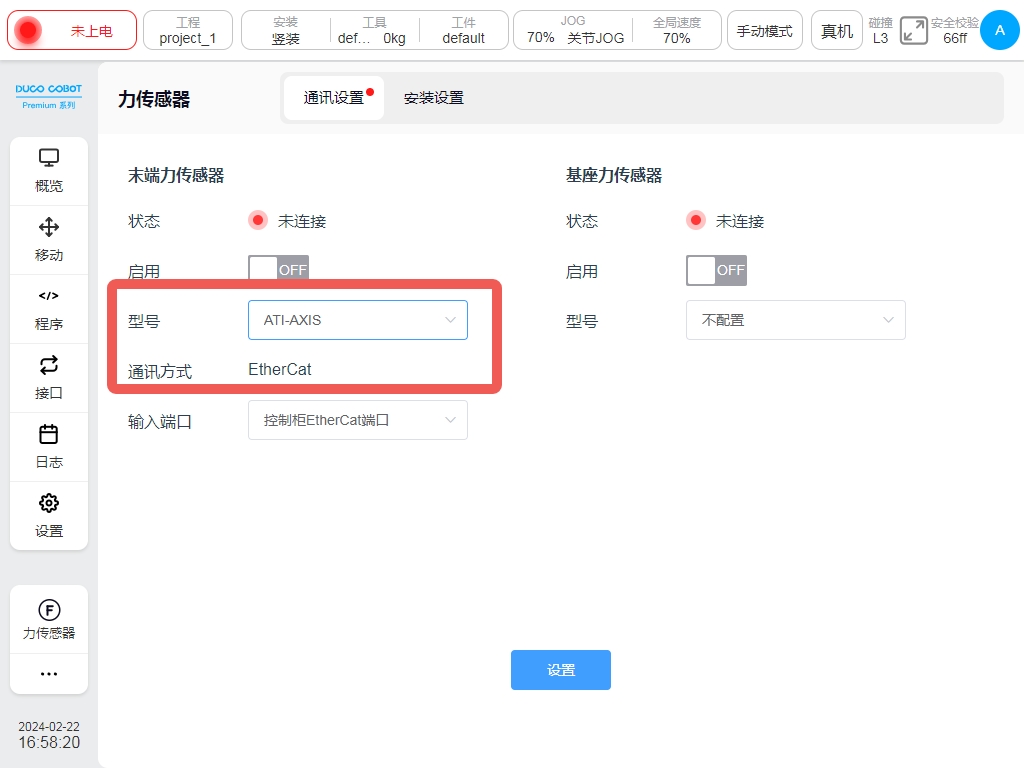
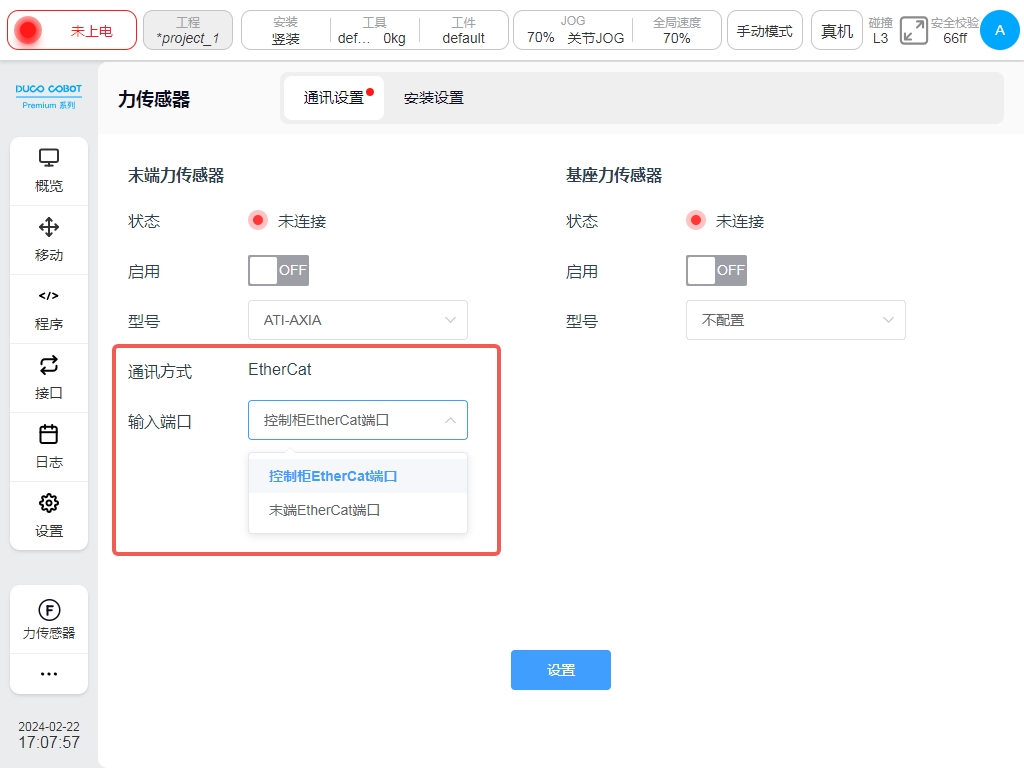
点击型号选择栏,所有显示的传感器型号为官方适配型号。选择对应的官方适配新型号后,会自动匹配其通讯方式。当前支持的两类力传感器通讯方式为:
EtherCAT;
485
如下图所示:
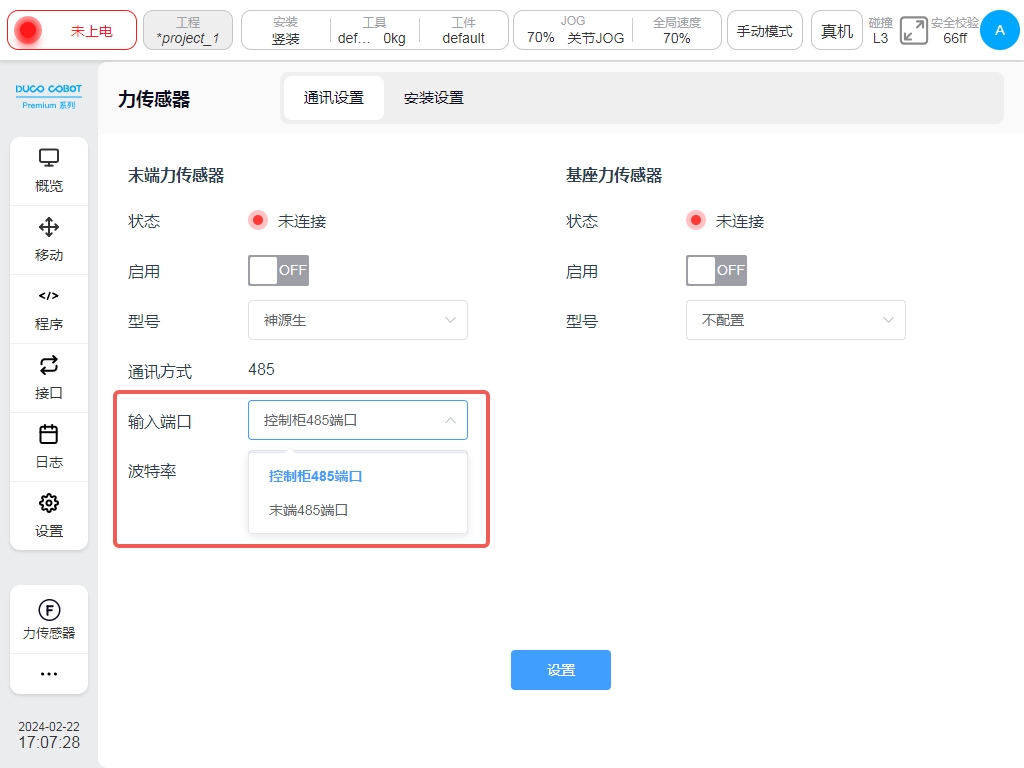
无论选择的传感器型号未EtherCAT通讯或485通讯,都需要根据实际情况配置传感器输入端口在机器人末端或控制柜上,如下图所示:
基座力传感器的配置方式与末端力传感器的配置方式完全相同。
注意
基座力传感器仅支持配置为输入端口位于控制柜接口上,无法被配置为末端接口。
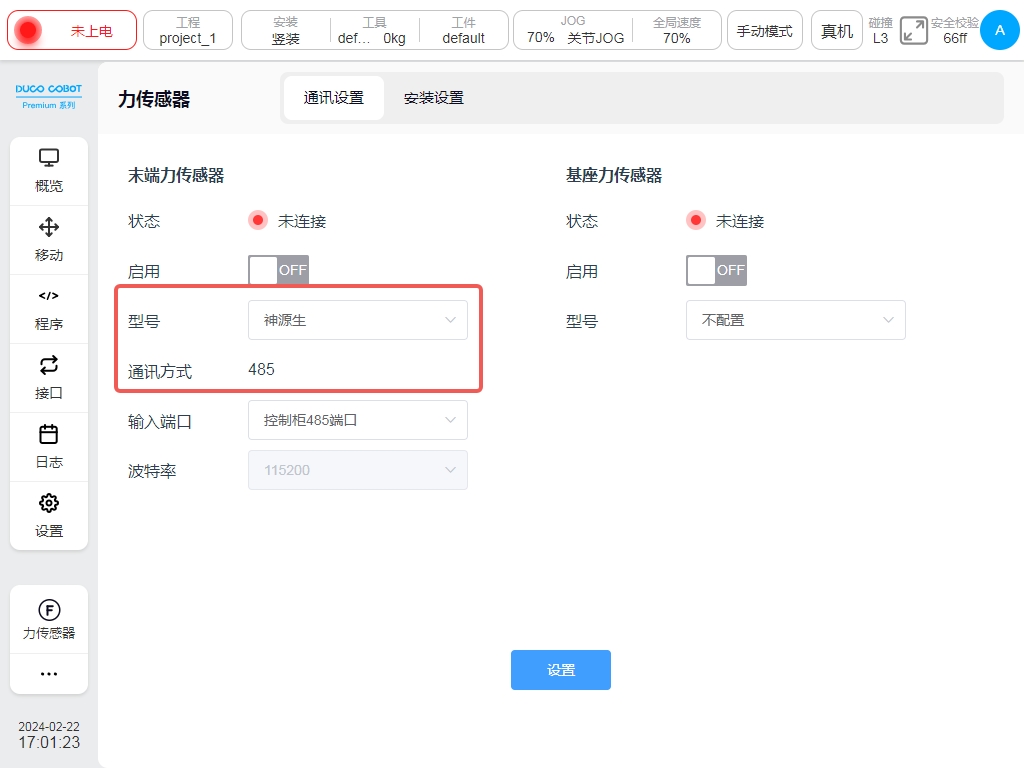
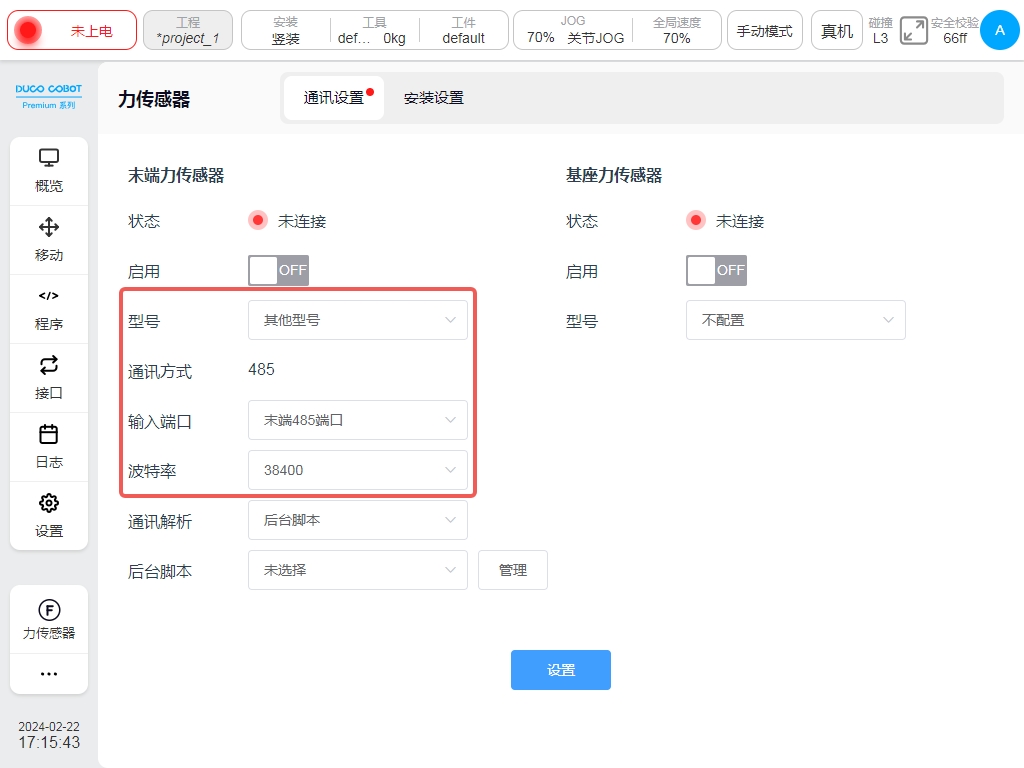
其他型号
当前其他型号传感器型号仅支持485通讯接口,用户需根据传感器对应输入端口及波特率完成相应配置,以保证通讯的正常建立,如下图所示:
用户可以通过定义实时配方或后台脚本,并根据传感器厂商提供的485通讯协议格式完成对数据帧解析,并通过机器人末端力数据传输接口将力传感器数据信息传递给机器人。如下图所示:
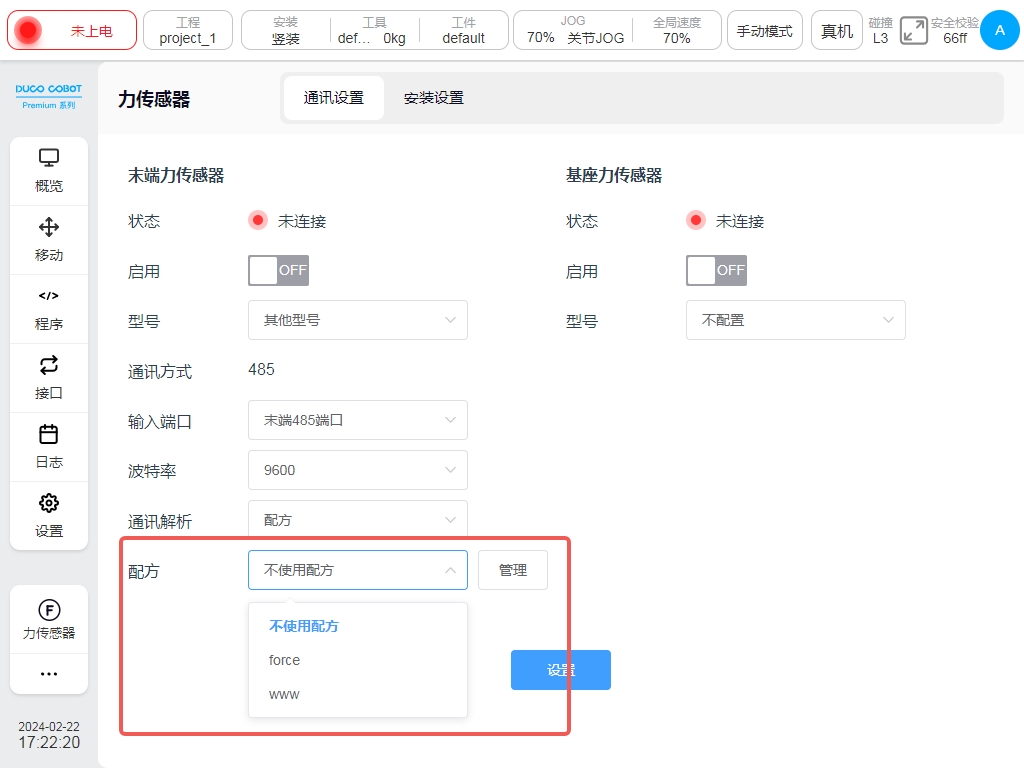
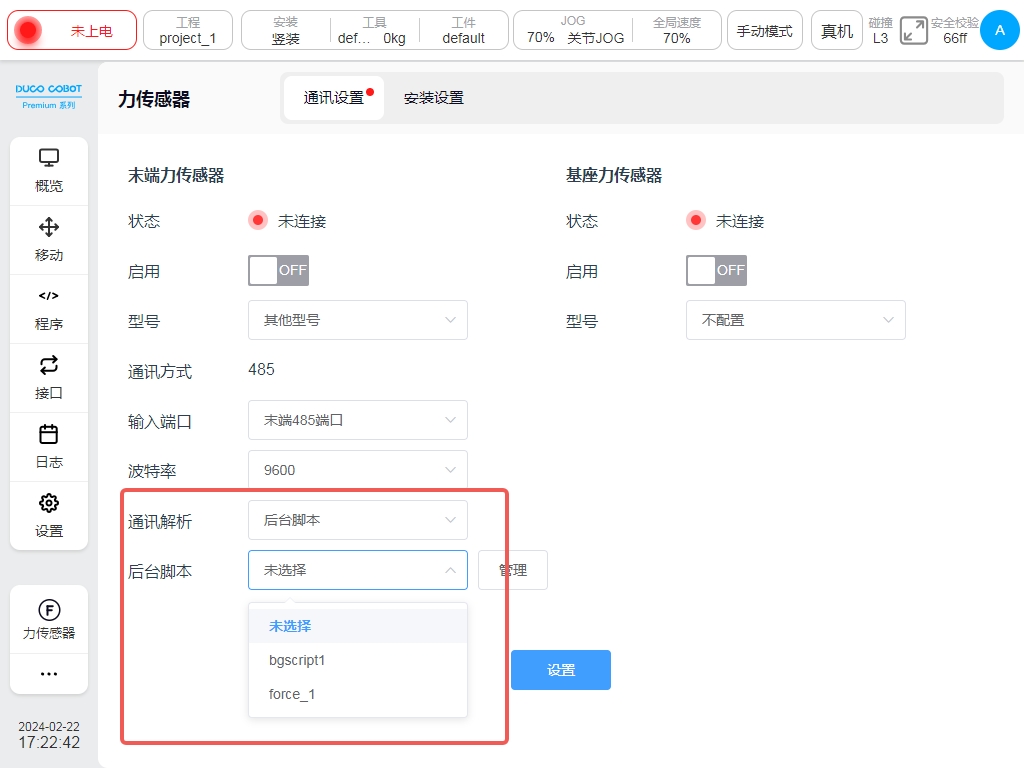
注意
配方与后台脚本的使用详情请参考机器人软件用户手册。
在完成了力传感器型号的配置后,点击"设置"按钮完成配置。完成配置后,会弹窗提示配置成功,需要重启机器人控制系统后生效,如下图所示:
重启机器人系统后,按照配置在对应输入端口正确连接力传感器并上电。点击"启用"按钮,若传感器通讯连接正常,则力传感器连接状态会变更为"已连接",如下图所示:
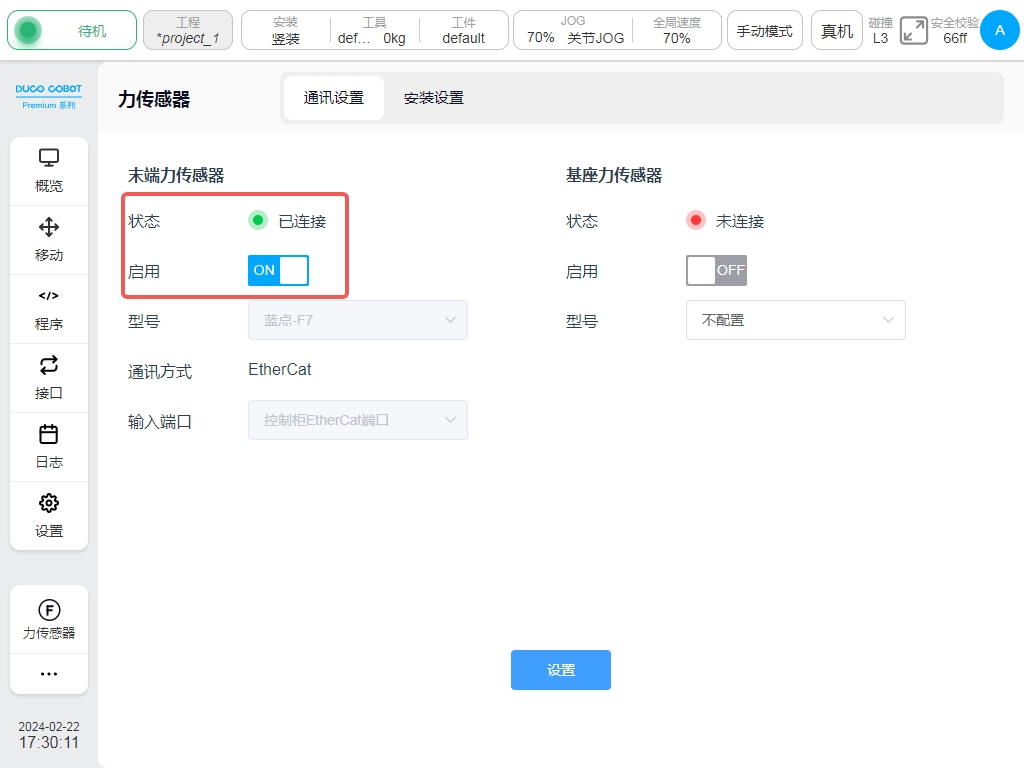
正确完成传感器配置后,即可使用机器人力控功能。
传感器安装位置配置#
用户在完成力传感器的安装后,需要对传感器安装位置进行正确配置,如下图所示:
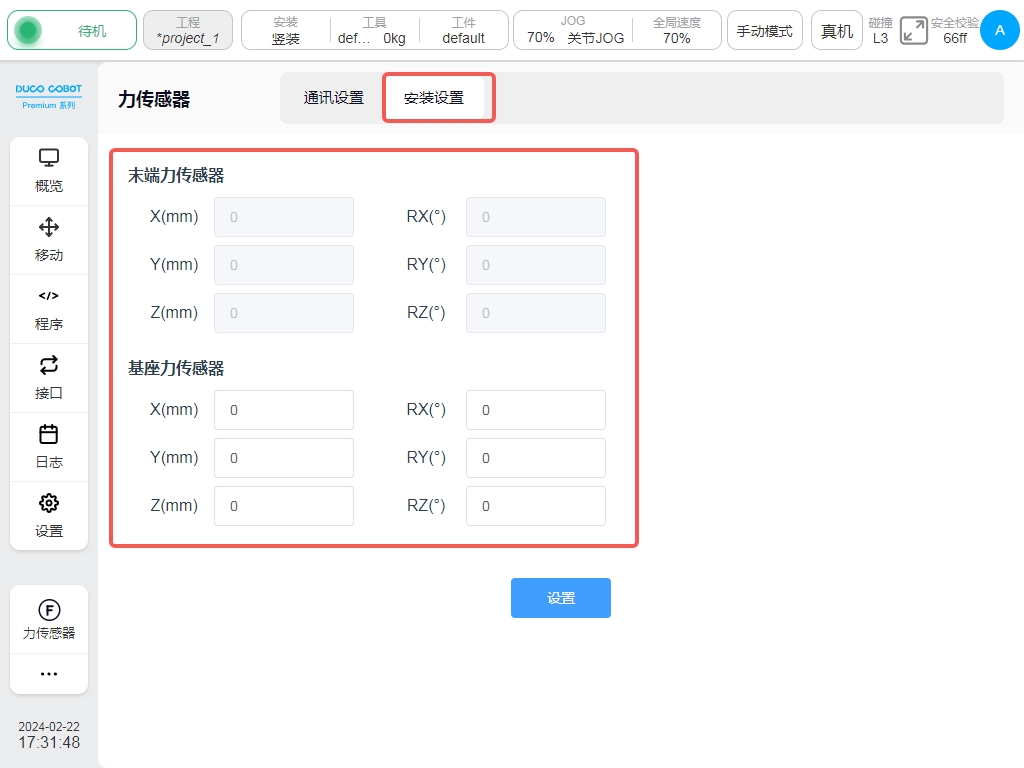
若选择使用末端力传感器,则其中X/Y/Z为末端力传感器受力面坐标系原点在机器人末端法兰坐标系中的位置偏移量,单位毫米;RX/RY/RZ为末端力传感器受力面坐标系在机器人末端法兰坐标系中的姿态RPY旋转偏移,旋转顺序参考Z-Y-X旋转轴顺序,单位度。
若选择使用底座力传感器,则其中X/Y/Z为机器人基坐标系原点在底座传感器受力坐标系中的位置偏移量,单位毫米;RX/RY/RZ为机器人基坐标系在底座传感器受力坐标系中的姿态PRY旋转偏移,旋转顺序参考Z-Y-X旋转轴顺序,单位度。
在正确填写力传感器安装位置后,点击设置安装位置生效配置。
注意
传感器安装位置仅在传感器未启用时可被配置。
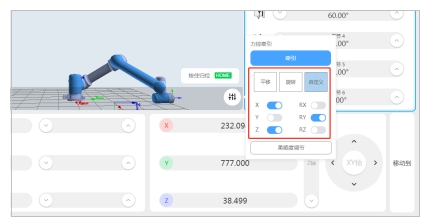
牵引参数设置#
在力控传感器安装位置设置正确的前提下,若仍然感觉力控牵引不顺滑,用户可以在“牵引参数设置”页面中,填入传感器安装面与牵引施力点之间的关系,以及传感器安装面处的负载信息,以提高牵引手感。如下图所示:

“负载辨识”功能,将在《末端负载辨识》章节中介绍
其他设置#
由于力传感器存在温漂与时漂,可以在“其他设置”中,通过设置“定时清零”与“手动清零”的方式,来规避每次牵引手感不一致。如下图所示:

“定时清零”:当到达规定时间后,将自动触发一次清零指令。清零指令将以当前传感器的原始值,作为外力为0N的基准参考。默认值为0,即关闭定时清零功能。
“手动清零”:点击“手动清零”按键时候,将触发一次清零指令。
备注
1.执行“手动清零”前,需要评估当前力传感器的受力情况,以及清零后的效果。 如,进入牵引前,末端负载10kg,触发一次“手动清零”指令后将负载移除,此时再次进入牵引功能是,将多花费10kg的力,才能牵引机器人。
2.牵引过程中“手动清零”功能将被屏蔽,无法触发。