末端负载辨识#
功能简述#
用户选择末端负载辨识功能时,仅需要将应用所需的工装负载安装固定在末端力传感器受力端,通过示教任意4个末端姿态,即可获得高精度的工具负载的质量与质心信息,并在机器人后续使用过程中使用该质量与质心信息,从而提高机器人力控相关功能性能。
为了保证末端负载辨识精度,末端负载辨识功能仅在正确接入并启用末端力传感器时才可使用。
功能限制#
用户选择使用末端负载辨识功能时,需要注意以下功能限制:
使用该功能需要正确配置并启用末端力传感器。
使用该功能前需将待辨识工具负载安装并固定在末端力传感器受力端上,否则将影响辨识精度。
使用该功能过程中,请勿使用末端力控牵引功能,否则辨识结果将不具备参考价值。
功能操作界面#
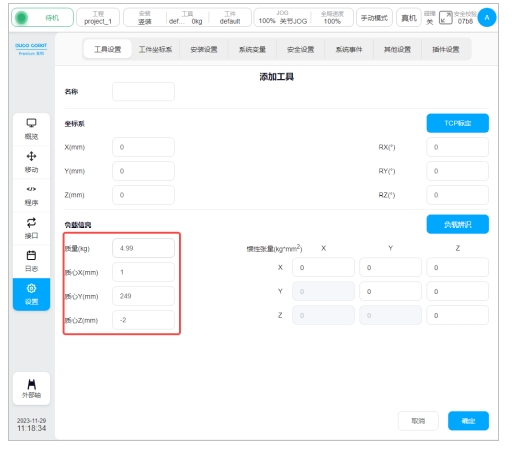
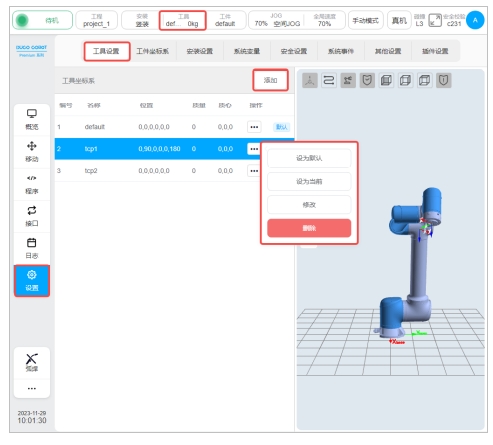
在机器人设置界面-工具设置界面中,可以进行机器人工具的设置,添加新工具或点击对应工具的修改按钮可以对机器人工具坐标系名称、位置、质量与质心参数进行配置,如下图所示:
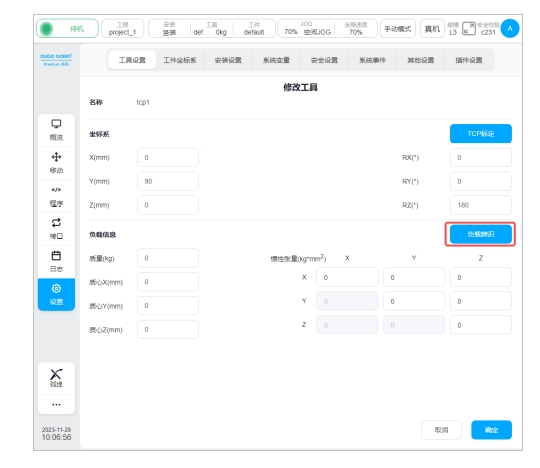
进入工具配置页面后,点击“负载辨识”按钮,可进入质量质心辨识功能,如下图所示:
进入质量质心辨识功能操作界面,如下图所示:
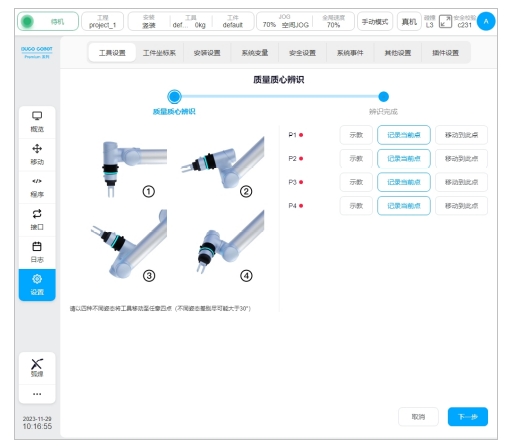
操作界面中包含:辨识点位P1-P4“示教”、“记录当前点、“移动到此点”按钮、辨识点位指示灯、功能 “取消”按钮及辨识计算“下一步”按钮。
辨识点位设置#
用户使用末端负载辨识功能时,先要选取4个辨识点位,点击操作界面中的“示教”按钮,界面会跳转到移动页面,如下图所示:

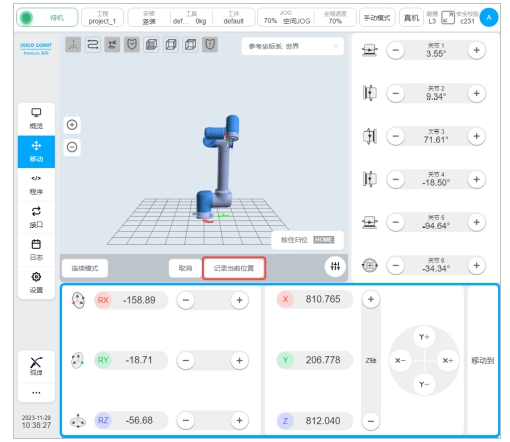
移动机器人到目标点后,单击“记录当前位置”,界面会跳回质量质心辨识示教标定点界面,且示教好一个标定点后,对应标定点后的红色圆点会变成绿色,如下图所示:

也可通过示教器物理按键直接移动机器人到目标点位后,直接单击“记录当前点”。
当完成P1-P4所有辨识点位的设置后,点击“下一步”按钮,即可进行末端负载辨识,如下图所示:

辨识点位之间需要满足如下关系:
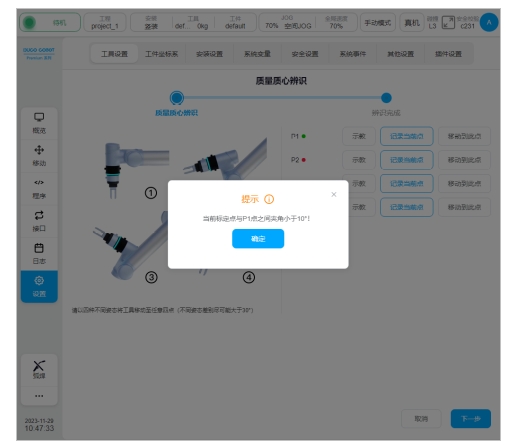
点位与点位之间末端姿态旋转偏移需要大于10°。
点位与点位之间不能存在共面的情况。
示教过程中,当前示教点位不满足限制条件会弹框提示如下:
若出现所有点位共面情况,点击“下一步”按钮进行辨识功能则会反馈对应错误,提示用户辨识点位违反了上述限制,用户需要根据提示信息进行相应辨识点位的修改,直到满足末端负载辨识功能的点位需求。
辨识结果生效#
辨识结果会在正确设置所有辨识点位并点击确认后显示,如下图所示:
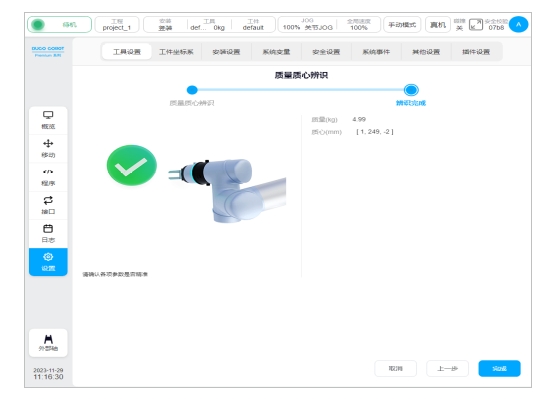
用户可以根据实际情况决定是否使用该组质量与质心参数作为当前工具设置参数。若选择使用,点击“完成”按钮即可,如下图所示: