多机协同功能简介#
功能目标#
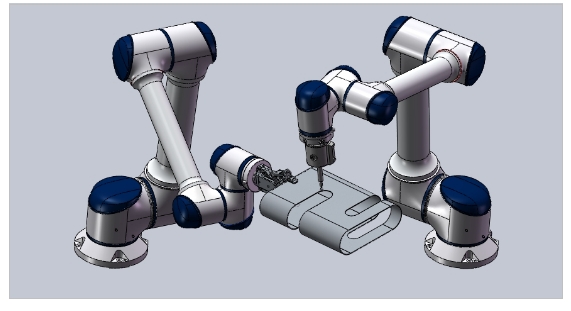
多机协同功能使得两台机器人之间可以参考特定的模式进行同步运动,例如:关节空间同步、笛卡尔空间同步、主从特征跟随等。使用多机协同功能,可以让两台机器人以不同的形式同时对同一个工件进行操作,如下图所示:

功能术语#
主机器人:在多机协同功能中,主机器人(又称Server端机器人)作为功能控制端,控制另一台或多台机器人的行为。一台主机器人可用于与另一台或多台机器人连接并进行控制。
从机器人:在多机协同功能中,从机器人(又称Client端机器人)作为功能被控制端,在多机协同作业过程中受主机器人控制而产生相对应运动。一台从机器人仅可用于与另一台主机器人连接并被控制,无法同时被多台主机器人控制。
.
使用限制#
用户选择使用多机协同功能时,需要注意以下使用限制:
使用多机协同功能的机器人需要同时正确安装MultiMachine插件包并启用,且软件版本在V2.7.0及以上。
用户在使用多机协同功能的主从特征跟随模式前,需确认用于多机协同功能的主从机器人末端工具在工作空间上存在交集,以满足主从机器人安装位姿关系的标定需求。
用户在使用多机协同功能前,需确认用于多机协同功能的主从机器人可以直接通过网线连接器控制柜,尽量避免通过中间路由等环节进行通讯连接,从而避免由于通讯实时性延迟造成的最终作业表现下降;
在执行多机协同运动脚本前,用户需正确对主从机器人进行配置与相对安装位姿关系进行标定,并确定通讯连接且配置参数生效,否则将对脚本运行效果产生影响,从而产生作业风险。
用户在编写完多机协同运动脚本后,由于从机器人的运动将直接受主机器人控制,因此在运行脚本前需对从机器人工作空间是否存在干涉问题作出评估,从而避免在运动过程中机器人存在与外界人与物或主机器人发生碰撞的可能。