多机协同功能配置#
插件安装#
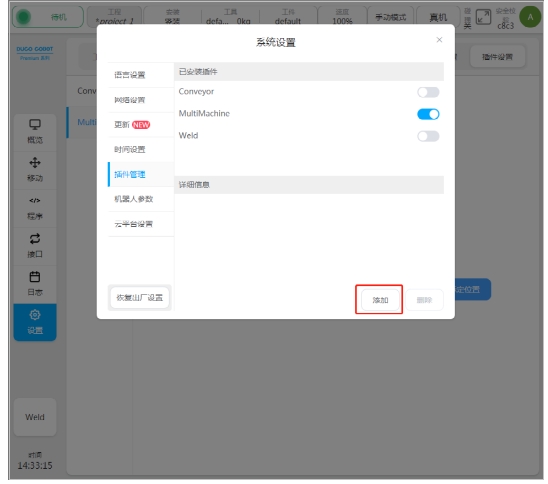
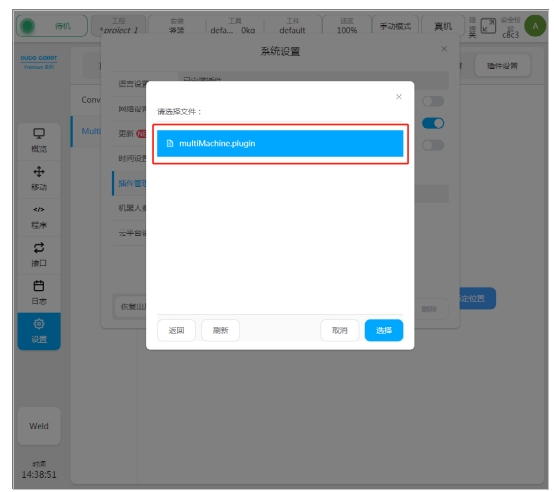
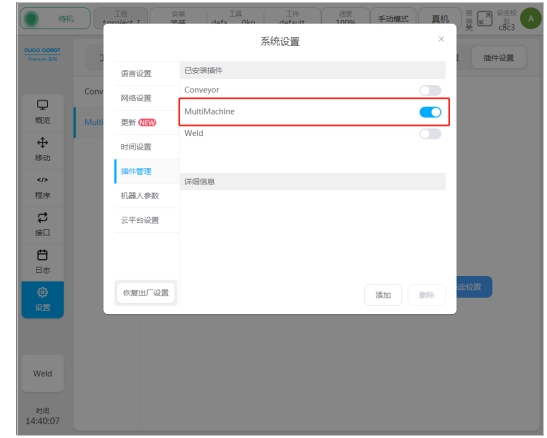
用户在使用多机协同功能前,需正确安装MultiMachine插件。如下图所示:
主从机器人通讯连接#
用户需正确通过网线连接主从机器人控制柜上的LAN口,并在控制器中将对应LAN口IP地址修改为同一网段下,以保证主从控制器间具备建立TCP/IP通讯的条件,如下图所示: 主机器人LAN口IP配置:
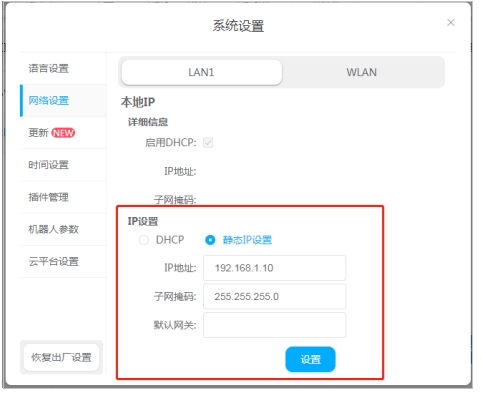
从机器人LAN口IP配置:

需要注意的是,主从机器人连接所对应LAN口不能被配置为同一IP地址,否则会造成IP地址冲突而无法正常通讯。此外,主从机器人控制柜间LAN口间应尽可能使用网线直连,采用路由等方式进行连接可能会导致通讯质量降低而影响最终多机协同功能的使用。
主机器人通讯配置#
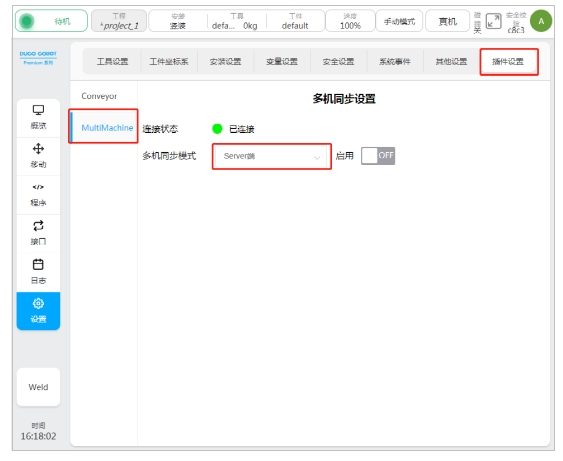
用户需确定多机协同功能使用过程中作为主控制端的机器人并进行配置,如下图所示:
从机器人通讯配置#
用户需确定多机协同功能使用过程中作为从被控制端的机器人并进行配置,如下图所示:
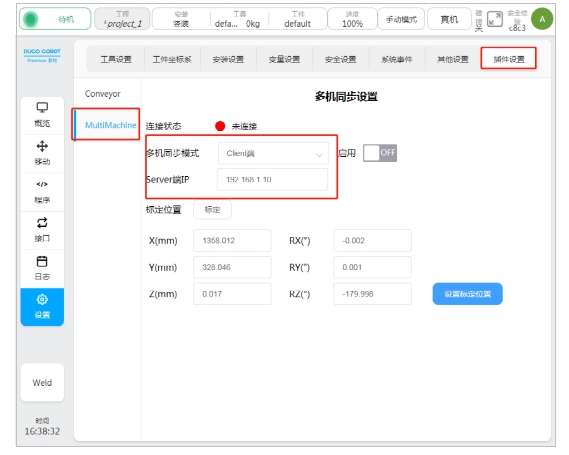
需要注意的是,从机器人需要正确配置对应连接的控制端主机器人LAN口IP地址,从而实现主从间通讯。正确配置从机器人后,可启用从机器人的多机协同功能,确认通讯是否正确连接,如下图所示:
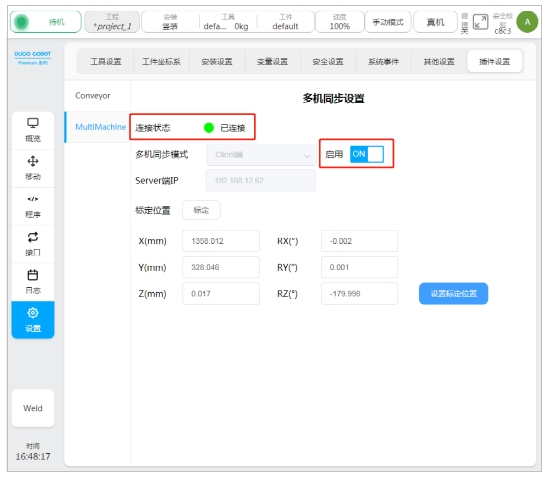
对于从机器人,若通讯正常,则连接状态指示灯将点亮。
主从标定#
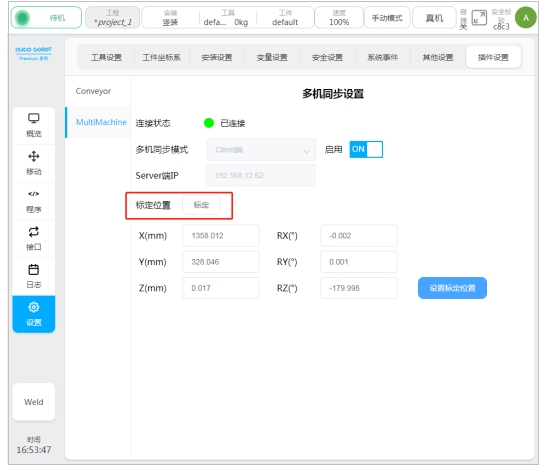
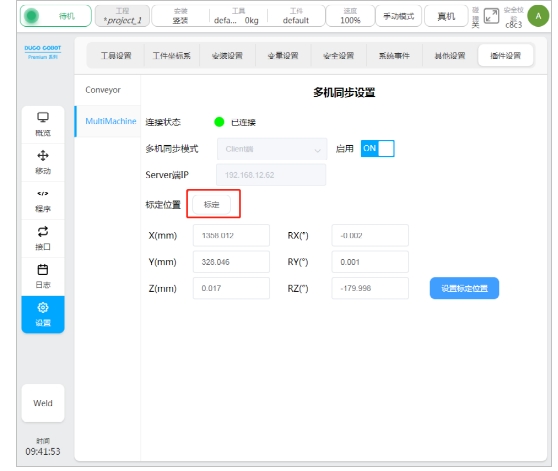
当完成主从机器人通讯配置并确认连接已正常建立后,需对从机器人进行主从安装位姿关系标定后才可进行多机协同功能的使用。如下图所示:
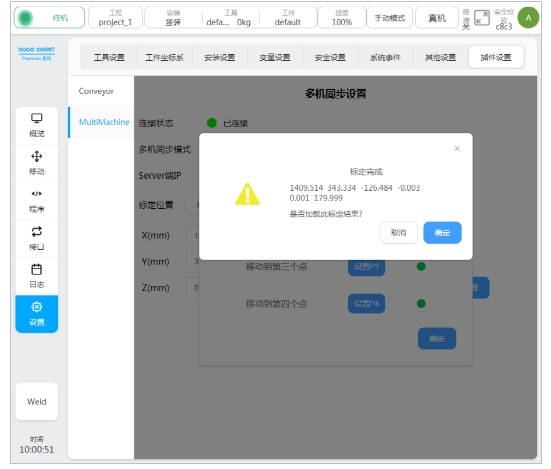
在标定过程中,需要将机器人工具切换至当前工具,并将主从机器人的工具中心分别移动到空间中的同一点上,并进行记录。重复4次上述流程后即可完成当前主从机器人间相对安装位姿关系的标定。如下图所示:
配图:(主从机器人工具移动到空间同一点)
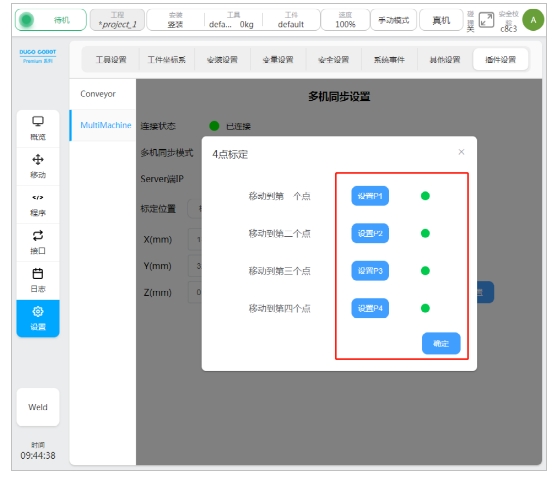
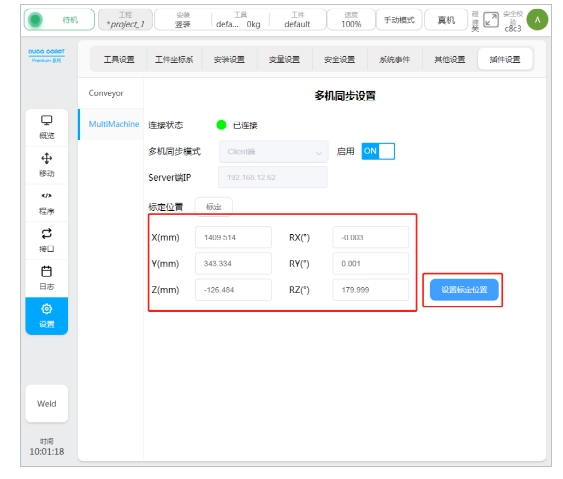
确认4次主从关系标定点位配置成功后,点击确定获取从机器人基坐标系相对于主机器人基坐标系的描述关系,并将结果填入配置参数中生效。如下图所示: