应用案例#
同步跟随应用案例#
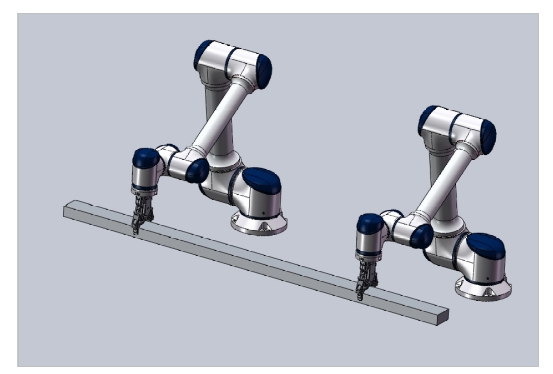
如图所示,两台机械臂期望以图中显示状态同时对同一工件进行抓取及摆放操作。由于工件自身较长且刚度较大,需要两台械臂以极高精度同步性对其完成协同作业,避免由于两台机械臂间由于运动不同步导致对工件产生较大剪切力导致工件损坏。
针对上述工况,通过多机协同编程可以以如下方式实现:
1、参考章节3至章节4,完成对两台机械臂的多机协同功能插件安装、通讯连接调试、主从配置、主从标定及功能启用;
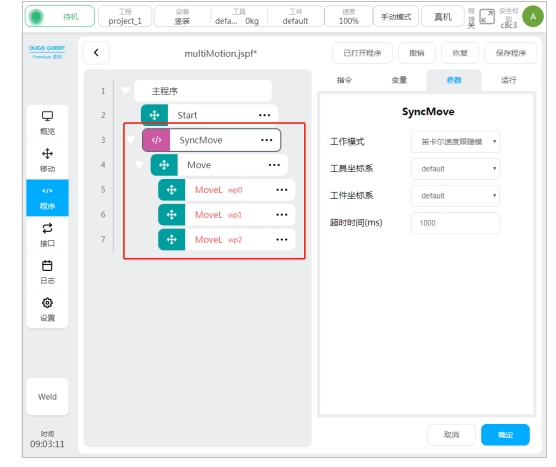
2、 编写主机器人脚本程序,在抓取工件起点添加SyncMove脚本根节点,正确配置参数,并在根节点下添加工件抓取与摆放所需运动脚本。由于实际工况需要主从机械臂在笛卡尔空间中严格保持抓取速度的同步,从而避免对工件产生剪切力,因此可以使用笛卡尔速度跟随模式。若两台机械臂通过正确配置工具及工件坐标系,使其在抓取过程中各自工具在工件坐标系中的位置始终相同,也可以选用笛卡尔位置跟随模式。如下图所示:
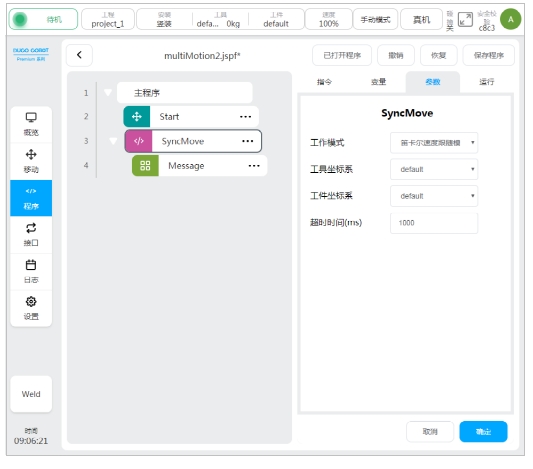
3、在完成主机器人配置后,从机器人只需在其工件抓取起点添加SycMove根节点并配置即可即可,无需在其下方添加任何其他指令。如下图所示:
特征跟随应用案例#
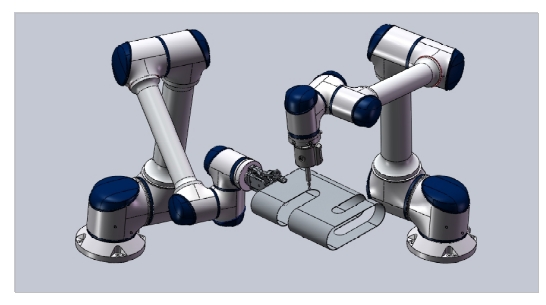
如图所示,机械臂需要对工件进行加工打磨操作,但是由于构型限制其空间运动范围,导致机械臂无法有效完成对完整工件表面的加工作业。此时需要另一台机械臂抓取工件进行移动,使完整工件表面可以被加工打磨机械臂在其工作空间中接触并完成作业。
针对上述工况,通过多机协同编程可以以如下方式实现:
1、参考章节3至章节4,完成对两台机械臂的多机协同功能插件安装、通讯连接调试、主从配置、主从标定及功能启用;
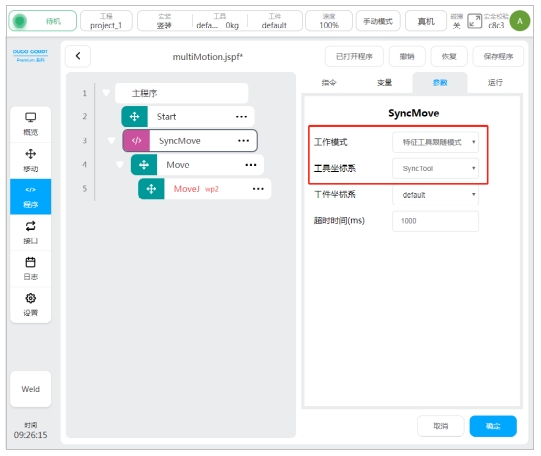
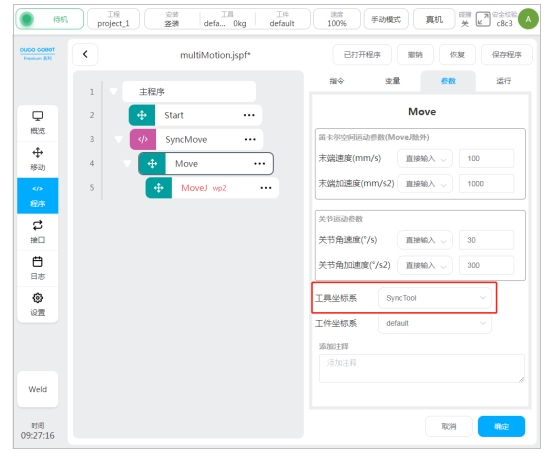
2、主机器人作为工件抓取机器人,选取抓取工件后工件上一特征点作为其工具坐标系,用以编写SyncMove同步运动过程中运动脚本,如下图所示:
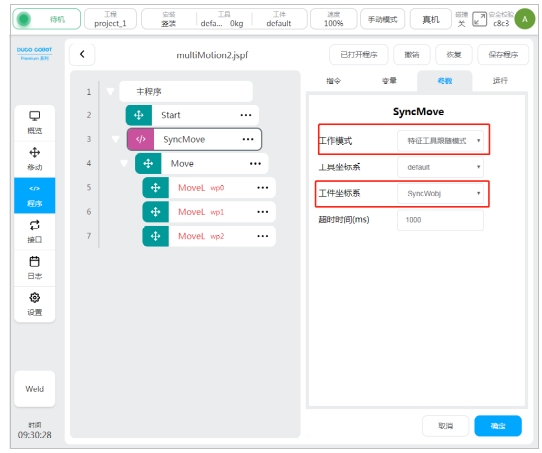
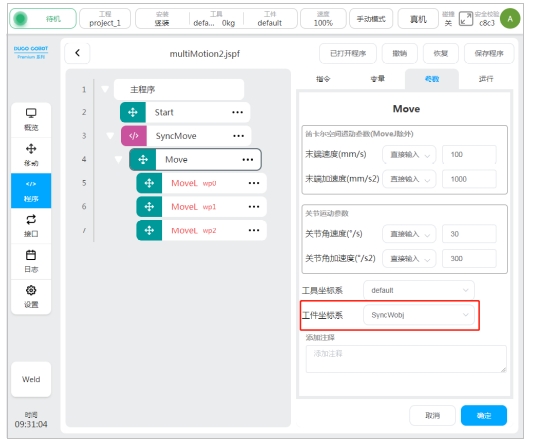
3、从机器人作为作业机器人,需选取工件上的同一特征点作为其工件坐标系,并在该工件坐标系中完成对工件作业轨迹的示教,并将其添加至SyncMove脚本根节点下。如下图所示:
4、当主从机器人进入同步模式后,主从机器人会开始参考各自SyncMove根节点下的运动脚本开始执行运动指令。从机器人在同步过程中,所有运动所参考工件坐标系会同步为主机器人的工具坐标系所在位置,并实时对自身运动指令进行修正,从而实现同步作业加工的目标。