焊接工艺包简介#
焊接应用中,通常需要机器人与焊机直接通讯,以降低通讯延时,从而达到更好的焊接质量。焊接工艺包分为两大部分,焊机的设置与焊接指令应用。
适配说明#
焊接工艺包安装前,需要保证机器人的软件版本适配,具体的:
机器人控制软件版本 |
V2.2.1及以上 |
机器人从站固件版本 |
V1.0.2及以上 |
机器人安全控制器版本 |
V2.1.0及以上 |
机器人的版本信息,可以在机器人上电后,在“关于”界面中查询到。“关于”界面的打开方式,请见《DUCO CORE-用户手册》第7章节。
V1.3版本及以上的焊接工艺包,需要保证机器人的软件版本在V2.7.0及以上
当前版本支持的焊机型号有:
焊机厂商 |
焊机型号 |
通讯协议 |
|---|---|---|
麦格米特 |
ArtSet Plus/Pro系列 |
CAN |
当前版本支持的激光传感器有:北京创想,唐山英莱,苏州全视
焊机连接#
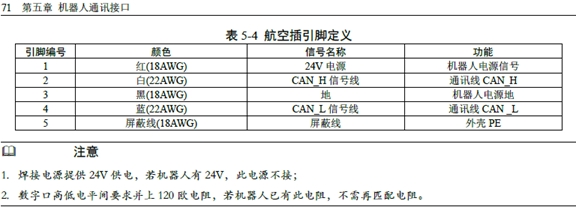
使用CAN通讯时,需要参考《协作机器人用户手册(硬件部分)》,与焊机说明书,将两者的CAN通讯接口对接,为保证通讯质量,通常需要在接口处并联一个120Ω的终端电阻以消除信号反射。以适配麦格米特ArtSet Plus/Pro系列焊机为例:
1、查询《协作机器人用户手册(硬件部分)》,找到CAN通讯接口,如下图所示:

从表格中可知,CAN通讯使用引脚18,19,20
2、 查询焊机说明书,找到焊机侧CAN通讯接口,如下图所示:
3、 根据机器人与焊机说明书所述,将焊机通讯航插白色线与机器人拓展接口第18号引脚相接,将蓝色线与机器人拓展接口第19号引脚相接,将黑色线与机器人拓展接口第20号引脚相接。
工艺包安装与卸载#
焊接工艺包文件为“weld.plugin”的插件。安装步骤如下所示:
1、 将焊接工艺包放入U盘,U盘要求格式为FAT32
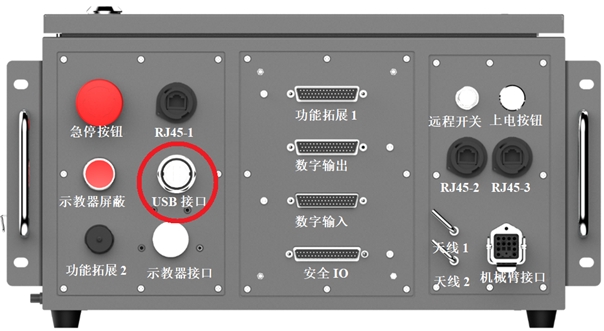
2、 机器人系统启动后,在机器人控制柜上,USB接口处插入U盘。
3、 使用admin账户登录机器人系统。
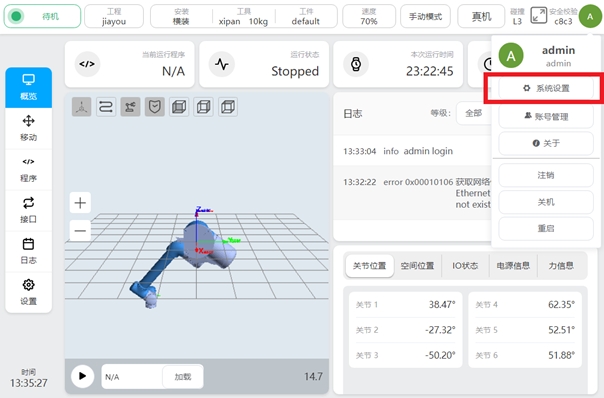
4、点击用户头像  ,选择系统设置。
,选择系统设置。

5、选择插件管理功能。

6、点击添加按钮。
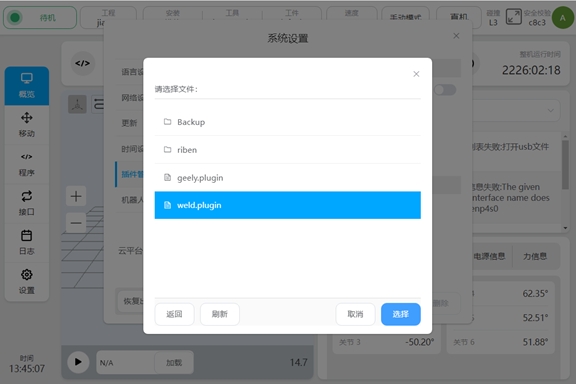
7、选择U盘并从文件列表中,找到并选择“weld.plugin”插件包。
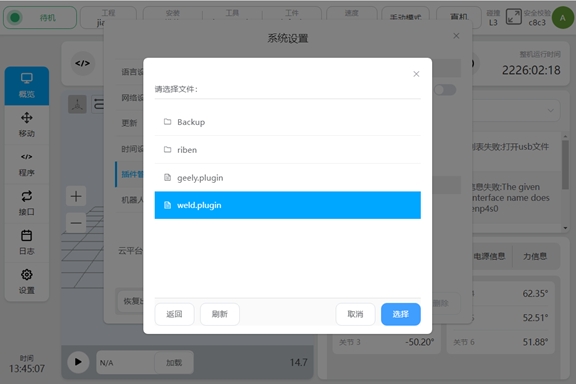
8、插件包安装完成后,如下图所示,将在标注处显示插件包安装完成。在标注处,新安装的插件包将默认为使能。在标注处,将显示当前插件包的名称,版本信息等内容。

9、焊接工艺包安装完成后,将在主页面的左下方,出现工艺包设置入口。
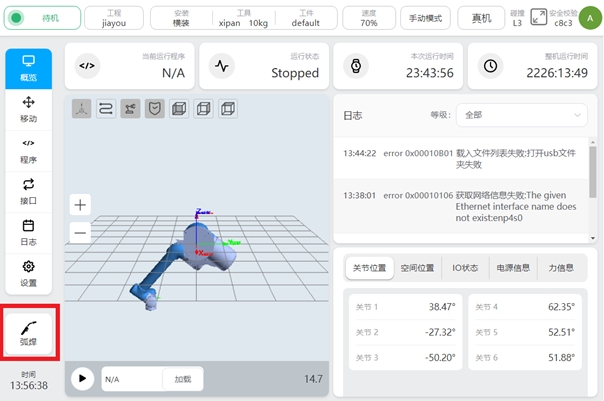
10、点击此工艺包设置入口按钮,即可进入焊接工艺包设置页面。

11、已安装好的焊接工艺包,可以通过关闭使能信号的方式,暂时失效。或者点击删除按钮,将工艺包彻底删除。
