错误代码#
报错信息窗口#
当产生一条error错误日志的同时,界面会同时进行弹窗提醒,用户可以通过弹窗内容,大致了解报错原因及处理方法,报错弹窗形式如下图所示:
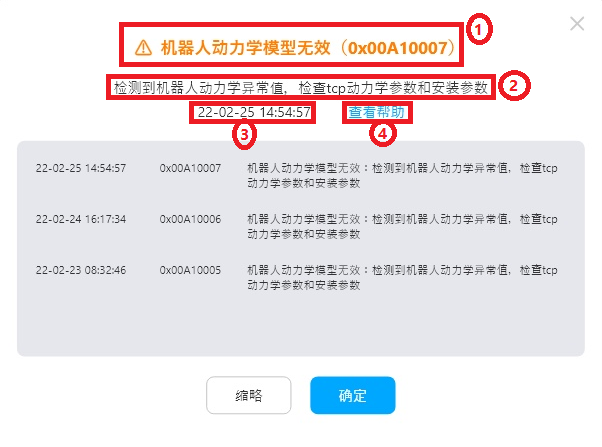
弹窗第一行会用黄色粗体字标识报错内容及对应的报错码。
第二行将会描述错误的原因及大致的排查方向。
第三行记录报错发生的时间。
若对该错误仍有疑问,可点击“查看帮助”进一步了解。
错误代码组成#
错误码是由一组16进制的32位错误代码组成,以8位预留位+8位错误模块id+详细错误id形式表示,以0x00A10007机器人动力学模型无效错误为例:
预留位 |
错误模块id |
详细错误id |
|---|---|---|
0x00 |
A1 |
0007 |
错误代码表#
系统问题[0x00]#
0x00000001: Robot power on error
详细错误描述 |
处理意见 |
|---|---|
Fatal communication error detected |
重启控制柜,若无法消除错误,联系研发 |
Safety board state in INIT |
|
Safety board version need to be updated |
通过DucoCore升级功能将安全板升级到 版本兼容性所要求的最低版本 |
Get safety board version info fail |
通讯层异常,检查控制柜内控制器与安全板间接线, 重启控制柜 |
Get communicaiton board version info fail |
通讯层异常,检查控制柜内控制器与安全板间接线, 检查控制柜内安全板与通讯板间接线(DC30控制柜), 重启控制柜 |
IO board version need to be updated |
通过DucoCore升级功能将通讯板升级到 版本兼容性所要求的的最低版本 |
Safety controller not in operational status |
观察概览界面下安全状态机切换过程,记录上电前 安全控制器最后切换到的状态机后,重启控制柜,若无法 消除错误,更换安全板并排查被更换安全板内部问题 |
Model parameters config fail 0x******** |
通讯层错误,记录通讯错误代码, 检查控制柜内控制器与安全板间接线, 重启控制柜 |
Model parameters check error 0x******** |
|
Model parameters check timeout |
|
Safety power on fail 0x******** |
|
记录并查询安全板代码,重启控制柜 |
|
Safety stop1 triggered please restore the emergency stop |
检查示教器急停、控制柜急停、用户急停是否存在 被按下未复位的情况,复位后重新上电 |
Safety power feedback abnormal |
重启控制柜,若错误无法消除,检查安全板状态 及控制柜内上电电路 |
Switch communication frame to ready-to-switch-on status fail |
通讯层异常,检查控制柜内控制器与安全板间接线, 检查控制柜内安全板与通讯板间接线(DC30控制柜), 重启控制柜,若无法消除错误,联系研发 |
Communication frame swtich to swtiched-on status fail |
通讯层异常,通常由于上电过程中出现部分从站异常导致。 排查步骤1: 检查控制柜内控制器与安全板间接线, 检查控制柜内安全板与通讯板间接线 (DC30控制柜), 检查控制柜与机械臂间接线,检查机械臂内内部供电 与通讯接线,重启控制柜。 排查步骤2: 检查是否存在更新过机器人系统或更新部分驱动板的过程, 并且出现过更新过程异常。若是,则联系研发获取对应的 修复更新包,重新进行被中断的系统更新。 若经过上述排查步骤后无法修复问题,联系研发。 |
Switch communication frame to pre-operational status fail |
通讯层异常,该错误为初始化致命错误, 若出现请直接联系研发协助排查 |
Initialize communication frame fail |
|
Communication frame not in ready-to-switch-on status |
通讯层异常,通常由于控制柜内安全板与通讯板连接 异常导致,检查控制柜内控制器与安全板间接线, 检查控制柜内安全板与通讯板间接线(DC30控制柜), 重启控制柜,若无法消除错误,联系研发 |
Servo version upload error |
检查机械臂内伺服驱动板状态及接线,重启控制柜 |
Servo version need to be updated |
推荐(不强制)通过DucoCore升级功能将伺服驱动器升级到 版本兼容性所要求的最低统一版本 |
Get tcp board version info fail |
通讯层异常,检查机械臂内部末端板接线,重启控制柜 |
Robot info check error |
|
Robot info and safety function parameters need to be updated |
切换至具备Admin权限的账户下,重新上电, 根据弹窗引导将机器人末端板中存放参数同步至控制柜, 重启控制柜后再次上电并重新校验安全参数 |
Robot info need to be updated |
切换至具备Admin权限的账户下,重新上电, 根据弹窗引导将机器人末端板中存放参数同步至控制柜, 重启控制柜 |
Toolboard config fail 0x******** |
通讯层异常,检查机械臂内部末端板接线,重启控制柜 |
IO board config fail 0x******** |
通讯层异常,检查控制柜内控制器与安全板间接线, 检查控制柜内安全板与通讯板间接线(DC30控制柜), 重启控制柜 |
Safety parameters check error,Safety function parameters need to be updated 0x******** |
|
Safety function parameters need to be updated |
机械臂断电后重新配置安全参数 |
Axis config fail 0x******** |
通讯层异常,检查机械臂内伺服驱动器状态及接线, 重启控制柜 |
0x00000002: Robot power off error
详细错误描述 |
处理意见 |
|---|---|
0x00000003: Robot enable failed
详细错误描述 |
处理意见 |
|---|---|
Brake deactive detected,please activate all brakes before enable operation |
通过手动松抱闸功能确认所有关节抱闸为关合状态后重新使能 |
Safety state in * |
记录异常安全控制器状态,重启控制柜, 若错误无法消除,联系研发 |
Axis * error detected 0x******** |
记录伺服错误代码,参考伺服错误排查表进行问题排查 |
0x00000004: Robot disable failed
详细错误描述 |
处理意见 |
|---|---|
0x00000005: System reset failed
详细错误描述 |
处理意见 |
|---|---|
检查急停信号是否复位 |
0x00000006: System shutdown failed
详细错误描述 |
处理意见 |
|---|---|
保存工程 |
0x00000007: System restart failed
详细错误描述 |
处理意见 |
|---|---|
检查关机失败原因 |
0x00000009: Unregistered task or queue is full
详细错误描述 |
处理意见 |
|---|---|
1.重启控制柜;2.检查编程逻辑 |
0x0000000A: Task resume fail
详细错误描述 |
处理意见 |
|---|---|
Please remove the current collision state |
消除碰撞状态 |
文件系统问题[0x01]#
0x00010001: Add account failed
详细错误描述 |
处理意见 |
|---|---|
The same account exist |
更改新账号名称 |
0x00010002: Delete account failed
详细错误描述 |
处理意见 |
|---|---|
Account does not exist |
确认账号信息 |
0x00010003: Change password failed
详细错误描述 |
处理意见 |
|---|---|
Wrong account number or password |
确认账号及密码 |
0x00010004: Login failed
详细错误描述 |
处理意见 |
|---|---|
Wrong account number or password |
确认账号及密码 |
0x00010005: Check password failed
详细错误描述 |
处理意见 |
|---|---|
Wrong account number or password |
确认账号及密码 |
0x00010006: Logout failed
详细错误描述 |
处理意见 |
|---|---|
none |
— |
0x00010007: Verify Login failed
详细错误描述 |
处理意见 |
|---|---|
Wrong account number or password |
确认账号及密码 |
0x00010008: Get account list failed
详细错误描述 |
处理意见 |
|---|---|
File serialization failed |
重启控制柜 |
0x00010101: Load system file failed
详细错误描述 |
处理意见 |
|---|---|
none |
重启控制柜 |
0x00010102: Switch project failed
详细错误描述 |
处理意见 |
|---|---|
none |
重启控制柜 |
0x00010103: Set language failed
详细错误描述 |
处理意见 |
|---|---|
none |
— |
0x00010104: Change wlan failed
详细错误描述 |
处理意见 |
|---|---|
wifi.config open failed |
检查Wifi模块 |
0x00010105: Change ip failed
详细错误描述 |
处理意见 |
|---|---|
ifconfig failed(system) |
1.检查网卡、网口连接、网线;2.请联系售后 |
0x00010106: Get network infomation by name failed
详细错误描述 |
处理意见 |
|---|---|
The given Ethernet interface does not exist:name |
1.检查网络名称;2.检查网卡 |
0x00010201: Add project failed
详细错误描述 |
处理意见 |
|---|---|
The same project exists |
更换工程名 |
Add folder failed:name |
0x00010202: Delete project failed
详细错误描述 |
处理意见 |
|---|---|
Project not exist |
确认工程名 |
0x00010203: Delete project failed
详细错误描述 |
处理意见 |
|---|---|
Delete folder failed:name |
确认工程名 |
0x00010204: Get projetct list failed
详细错误描述 |
处理意见 |
|---|---|
Load folder failed:project |
文件系统受损,请联系售后 |
0x00010205: Rename project failed
详细错误描述 |
处理意见 |
|---|---|
project not exist/Rename folder failed:A to B |
确认工程名 |
0x00010206: Export project failed
详细错误描述 |
处理意见 |
|---|---|
Compress file failed:name |
1.重新执行导出操作;2.工程保存后再次导出 |
0x00010207: Import project failed
详细错误描述 |
处理意见 |
|---|---|
Compress file failed:name |
1.重新执行导出操作;2.工程保存后再次导出 |
0x00010301: Init filesystem failed
详细错误描述 |
处理意见 |
|---|---|
none |
重新启动控制柜 |
0x00010302: Save project failed
详细错误描述 |
处理意见 |
|---|---|
none |
重新启动控制柜 |
0x00010303: Get root file path failed
详细错误描述 |
处理意见 |
|---|---|
Root is empty |
重新启动控制柜 |
0x00010401: Load project setting failed
详细错误描述 |
处理意见 |
|---|---|
none |
重新启动控制柜 |
0x00010402: Config function digital input failed
详细错误描述 |
处理意见 |
|---|---|
none |
1.检查模式是否正确;2.检查索引是否越界 |
0x00010403: Config function digital output failed
详细错误描述 |
处理意见 |
|---|---|
none |
1.检查模式是否正确;2.检查索引是否越界 |
0x00010404: Config function register input failed
详细错误描述 |
处理意见 |
|---|---|
none |
1.检查模式是否正确;2.检查索引是否越界 |
0x00010405: Config function register output failed
详细错误描述 |
处理意见 |
|---|---|
none |
1.检查模式是否正确;2.检查索引是否越界 |
0x00010406: Config interface name failed
详细错误描述 |
处理意见 |
|---|---|
none |
1.更改接口名称;2.注意命名规则 |
0x00010407: Set current loaded program failed
详细错误描述 |
处理意见 |
|---|---|
none |
检查设置信息 |
0x00010408: Set home position failed
详细错误描述 |
处理意见 |
|---|---|
none |
检查设置的home位置值 |
0x00010409: Set project auto login failed
详细错误描述 |
处理意见 |
|---|---|
none |
— |
0x0001040A: Set project default program failed
详细错误描述 |
处理意见 |
|---|---|
none |
— |
0x0001040B: Change interface recipe failed
详细错误描述 |
处理意见 |
|---|---|
File parse failed |
重新制作配方 |
0x0001040C: Open recipe failed
详细错误描述 |
处理意见 |
|---|---|
Recipe type not match |
检查配方类型 |
0x0001040D: Create recipe failed
详细错误描述 |
处理意见 |
|---|---|
none |
修改配方名称 |
0x0001040F: Delete recipe failed
详细错误描述 |
处理意见 |
|---|---|
none |
1.检查配方名称;2.停止程序运行。 |
0x00010410: Config profinet diconected response failed
详细错误描述 |
处理意见 |
|---|---|
none |
检查功能输出 |
0x00010501: Load workcell error
详细错误描述 |
处理意见 |
|---|---|
none |
重新启动控制柜 |
0x00010502: Add TCP coordinate error
详细错误描述 |
处理意见 |
|---|---|
The same TCP coordinate exists |
更改工具坐标名称 |
0x00010503: Modify TCP coordinate error
详细错误描述 |
处理意见 |
|---|---|
Tcp not exist |
检查工具坐标名称 |
0x00010504: Delete TCP coordinate error
详细错误描述 |
处理意见 |
|---|---|
Tcp not exist |
检查工具坐标名称 |
0x00010505: Add user coordinate error
详细错误描述 |
处理意见 |
|---|---|
The same user coordinate exist |
更改工件坐标名称 |
0x00010506: Modify user coodinate error
详细错误描述 |
处理意见 |
|---|---|
User coodinate not exist |
检查工件坐标名称 |
0x00010507: Delete user coodinate error
详细错误描述 |
处理意见 |
|---|---|
User coodinate not exist |
检查工件坐标名称 |
0x00010508: Set default tcp coodinater failed
详细错误描述 |
处理意见 |
|---|---|
none |
0x00010509: Set default user coodinater failed
详细错误描述 |
处理意见 |
|---|---|
none |
0x0001050A: Set robot installation failed
详细错误描述 |
处理意见 |
|---|---|
none |
0x0001050B: Can not find world
详细错误描述 |
处理意见 |
|---|---|
none |
0x0001050C: Can not find base
详细错误描述 |
处理意见 |
|---|---|
none |
0x0001050D: Add model error
详细错误描述 |
处理意见 |
|---|---|
Model with the same name already exists |
0x000163: Delete frame error
详细错误描述 |
处理意见 |
|---|---|
Frame does not exist |
0x00010601: Load device file failed
详细错误描述 |
处理意见 |
|---|---|
none |
1.重新同步设备信息;2.系统恢复出厂设置;3.联系售后 |
0x00010701: Load safety filed failed
详细错误描述 |
处理意见 |
|---|---|
none |
1.重新同步安全参数;2.安全参数恢复默认设置; 3.联系售后 |
0x00010801: Load logfile list failed
详细错误描述 |
处理意见 |
|---|---|
Open log folder failed |
1.关机重启后重新打开日志;2.联系售后 |
0x00010802: Load logfile failed
详细错误描述 |
处理意见 |
|---|---|
Open file failed |
1.关机重启后重新打开日志;2.联系售后 |
0x00010803: Export logfile failed
详细错误描述 |
处理意见 |
|---|---|
Compress file failed |
1.关机重启后重新导出日志;2.联系售后 |
0x00010901: Add global variable failed
详细错误描述 |
处理意见 |
|---|---|
The same global variable exist |
更改变量名称 |
0x00010902: Set global varialbe init value failed
详细错误描述 |
处理意见 |
|---|---|
Value not exist or type not match |
1.检查全局变量名称;2.检查输入值类型与全局变量类型 |
0x00010903: Delete global variable failed
详细错误描述 |
处理意见 |
|---|---|
Value not exist |
检查全局变量名称 |
0x00010904: Get global variable list failed
详细错误描述 |
处理意见 |
|---|---|
File serialization failed |
重新启动控制柜 |
0x00010A01: Set register value failed
详细错误描述 |
处理意见 |
|---|---|
none |
1.检查寄存器地址;2.检查输入值类型与寄存器类型; 3.检查输入值 |
0x00010B01: Load directory list failed
详细错误描述 |
处理意见 |
|---|---|
open name folder failed |
需要更换FAT32格式U盘 |
0x00010B02: Create directory failed
详细错误描述 |
处理意见 |
|---|---|
:name |
检查U盘是否接触不良 |
0x00010B03: Copy file failed
详细错误描述 |
处理意见 |
|---|---|
A to B |
1.修改文件名;2.检查U盘是否接触不良 |
0x00010B04: Delete file failed
详细错误描述 |
处理意见 |
|---|---|
name |
1.修改文件名;2.检查U盘是否接触不良 |
0x00010B05: Save file failed
详细错误描述 |
处理意见 |
|---|---|
name |
1.修改文件名;2.检查U盘是否接触不良 |
0x00010B06: Load file failed
详细错误描述 |
处理意见 |
|---|---|
name |
1.修改文件名;2.检查U盘是否接触不良 |
0x00010B07: File parse failed
详细错误描述 |
处理意见 |
|---|---|
A to B |
1.检查文件完整性;2.检查文件格式 |
0x00010B08: Export directory error
详细错误描述 |
处理意见 |
|---|---|
Compress file fail |
重新尝试导出 |
0x00010B09: append file error
详细错误描述 |
处理意见 |
|---|---|
name |
1.检查文件夹名;2.检查U盘是否接触不良 |
0x00010C01: Load motion para file failed
详细错误描述 |
处理意见 |
|---|---|
重新同步机械臂参数 |
0x00010D01: Install plugin failed
详细错误描述 |
处理意见 |
|---|---|
确认的插件包完整性与正确性 |
0x00010D02: Uninstall plugin failed
详细错误描述 |
处理意见 |
|---|---|
确认的插件包完整性与正确性 |
0x00010E01:
详细错误描述 |
处理意见 |
|---|---|
确认的插件包完整性与正确性 |
程序问题[0x02]#
0x00020001: Run program failed
详细错误描述 |
处理意见 |
|---|---|
停止正在运行的程序 |
0x00020002: Delete program folder failed;Types do not match
详细错误描述 |
处理意见 |
|---|---|
确认文件夹名称 |
0x00020003: Rename progarm folder failed;Types do not match
详细错误描述 |
处理意见 |
|---|---|
更改文件夹名称 |
0x00020004: Record trajectory failed
详细错误描述 |
处理意见 |
|---|---|
更改轨迹名称 |
0x00020005:
详细错误描述 |
处理意见 |
|---|---|
确认需要停止的轨迹名称 |
0x00020006: Load progarm list failed
详细错误描述 |
处理意见 |
|---|---|
确认加载路径 |
0x00020007: Load progarm failed
详细错误描述 |
处理意见 |
|---|---|
1.确认加载路径;2.确认程序名称 |
0x00020008: Save progarm failed
详细错误描述 |
处理意见 |
|---|---|
确认程序名称 |
0x00020009: Delete progarm failed
详细错误描述 |
处理意见 |
|---|---|
确认程序名称 |
0x0002000A: Rename Program failed
详细错误描述 |
处理意见 |
|---|---|
更改程序名称 |
运动问题[0x03]#
0x00030000: Move state queue fatal error
详细错误描述 |
处理意见 |
|---|---|
Queue fault times over limit |
联系研发 |
0x00030000: Move kinematics calculation error
详细错误描述 |
处理意见 |
|---|---|
0x******** |
确认机械臂实际运动状态,调整运动脚本 |
0x00030000: Move task error
详细错误描述 |
处理意见 |
|---|---|
Dual move task received |
检查是否编程存在调用非阻塞运动且在上一个运动未完成前 发送了新的运动指令(SpeedMove与ServoMove除外) |
0x00030000: Blend cancel
详细错误描述 |
处理意见 |
|---|---|
code:0x******** |
记录融合取消错误代码0x********, 参考融合运动编程技巧流程修改融合运动参数 |
0x00030000: Move task aborted
详细错误描述 |
处理意见 |
|---|---|
Receive invalid move task |
确认当前机器人是否处于程序暂停状态, 确认是否通过RPC等外部接口发送了运动任务, 停止当前运行程序后重新发送运动任务确认问题是否消失 |
0x00030001: Online move error
详细错误描述 |
处理意见 |
|---|---|
Invalid velocity setting parameter |
确认速度参数是否合法,修改速度参数 |
0x00030002: Single move error
详细错误描述 |
处理意见 |
|---|---|
Invalid velocity setting parameter |
确认速度参数是否合法,修改速度参数 |
Invalid acceleration setting parameter |
确认加速度参数是否合法,修改加速度参数 |
Invalid target pose parameter |
确认目标位姿参数是否合法,修改目标位姿参数 |
0x00030003: Blend move error
详细错误描述 |
处理意见 |
|---|---|
Invalid blend radius setting parameter |
确认融合半径参数是否合法,修改融合半径参数 |
0x00030004: Spline move error
详细错误描述 |
处理意见 |
|---|---|
The path input error |
检查Spline编程中的路点位是否存在空间点位重合 但是存在姿态变化的两个点,修改路点信息 |
Invalid velocity setting parameter |
确认速度参数是否合法,修改速度参数 |
0x00030005:
详细错误描述 |
处理意见 |
|---|---|
0x00030006: Conveyor move error
详细错误描述 |
处理意见 |
|---|---|
Conveyor move over limit 0x******** |
确认当前设置跟踪极限距离是否合理, 确认当前传送带速度及编码器值是否异常。 |
Robot conveyor sync fail 0x******** |
确认当前传送带速度及编码器是否异常, 确认当前传送带配置参数是否合理 |
0x00030007: Handling move error
详细错误描述 |
处理意见 |
|---|---|
Unkonwn external force detected, check tcp load parameters |
检查当前机器人负载质量与质心参数填写正确, 确认当前机器人安装方向设置正确, 确认机器人进入牵引模式前,无外部力施加在机械臂上 |
0x00030008: Teach replay error
详细错误描述 |
处理意见 |
|---|---|
Current point is not same to replay starting point |
确认复现轨迹起点位置,修改机器人脚本使机器人 开始牵引复现任务前处于该位置 |
The path input error |
检查牵引复现示教过程中的路点位是否存在空间点位重合 但是存在姿态变化的两个点,修改路点信息 |
Invalid velocity setting parameter |
确认速度参数是否合法,修改速度参数 |
0x00030009: Realtime control error
详细错误描述 |
处理意见 |
|---|---|
Realtime communication lost |
检查TCP通讯接线及其状态 |
Command joint position exceeds limit |
检查发送给机器人的实时控制关节位置指令 |
Command joint speed exceeds limit |
检查发送给机器人的实时控制关节位置/关节速度指令 |
Command joint acceleration exceeds limit |
|
Command joint jerk exceeds limit |
|
Command joint torque exceeds limit |
检查发送给机器人的实时控制关节力矩指令 |
Command cartesian velocity exceeds limit |
检查发送给机器人的实时控制笛卡尔位置/笛卡尔速度指令 |
Command cartesian acceleration exceeds limit |
|
Command cartesian jerk exceeds limit |
|
Inverse kinematic position solve fail |
|
Inverse kinematic velocity solve fail |
|
Inverse kinematic acceleration solve fail |
|
Robot approaches singularity |
|
Command tool force exceeds limit |
检查发送给机器人的实时控制末端力指令 |
0x0003000A: Servo move error
详细错误描述 |
处理意见 |
|---|---|
Inverse kinematic position solve fail |
检查发送给机械臂的ServoMove指令 |
Forward kinematic position solve fail |
|
Robot approaches singularity |
0x0003000B: Brake test error
详细错误描述 |
处理意见 |
|---|---|
Invalid test counter |
确认抱闸检测过程中检测关节是否产生有效位移 |
Brake operation error, 0x******** |
通讯层问题,确认机械臂各关节状态及接线,重启控制柜 |
0x0003000C: Dual robot calibration error
详细错误描述 |
处理意见 |
|---|---|
Calibration calculation fail code: 0x******** |
确认多机协同功能是否正常启动, 确认主从机械臂间通讯是否正常连接, 确认标定点位是否共面,记录标定错误代码0x******** |
0x0003000C: Sync Move Error
详细错误描述 |
处理意见 |
|---|---|
Sync Move function is deactivated |
在设置界面中确认多机协同功能是否正常启用 |
Illegle client sync move state |
确认Client端机器人是否处于正常状态, 确认主从机械臂间通讯是否正常连接 |
Illegle server sync move state |
确认Server端机器人是否处于正常状态, 确认主从机械臂间通讯是否正常连接 |
Fail to enter sync move |
联系研发 |
Sync move start position illegal |
检查多机协同运动起点分别在Server端机器人 与Client端机器人是否会令机器人处于奇异构型 或超出最大空间范围,修改点位 |
Real-time control error |
确认主从机械臂状态,确认主从机械臂间通讯是否正常连接 确认多机协同运动过程中是否存在会令机械臂报错情况 |
坐标系问题[0x04]#
0x00040001: Set tcp coodinate failed
详细错误描述 |
处理意见 |
|---|---|
修改工具坐标系名称 |
0x00040002: Set user coodinate failed
详细错误描述 |
处理意见 |
|---|---|
修改工件坐标系名称 |
0x00040003: Tcp calibration error
详细错误描述 |
处理意见 |
|---|---|
Calibrate points are too close, The distance between any two points should be greater than 1 mm |
重新示教标定点位,确保点与点之间距离大于1mm |
Unknown calibration type |
0x00040004: User Coordinate calibration error
详细错误描述 |
处理意见 |
|---|---|
Calibrate points are too close, The distance between any two points should be greater than 1 mm |
重新示教标定点位,确保点与点之间距离大于1mm |
Calibration points are collinear |
操纵模式问题[0x05]#
0x00050001: Switch operation mode error
详细错误描述 |
处理意见 |
|---|---|
Operation timeout |
安全板异常,确认此时安全板状态,重启控制柜 |
0x00050002: Switch operation mode error
详细错误描述 |
处理意见 |
|---|---|
Robot must in Enable state |
将机器人使能后进行仿真模式切换 |
Robot must in Stoppedstate |
停止当前机器人运动及正在运行的脚本后进行仿真模式切换 |
IO接口问题[0x06]#
0x00060001: Set digital output fail
详细错误描述 |
处理意见 |
|---|---|
确认输出端口号是否正确 |
0x00060002: Get digtial input fail
详细错误描述 |
处理意见 |
|---|---|
确认输入端口号是否正确 |
0x00060003: Set digital output failed
详细错误描述 |
处理意见 |
|---|---|
io is configured with output function |
1.确认输出端口号是否正确;2.确认端口的当前模式 |
0x00060004: Set digital output fail
详细错误描述 |
处理意见 |
|---|---|
io is configured with output function |
确认是否配置该端口为功能输出 |
0x00060005: Set analog output mode fail
详细错误描述 |
处理意见 |
|---|---|
Communication error 0x******** |
1.确认输出端口号是否正确;2.确认端口的当前模式 |
0x00060006: Set analog input mode fail
详细错误描述 |
处理意见 |
|---|---|
Communication error 0x******** |
1.确认输入端口号是否正确;2.确认端口的当前模式 |
安全设置问题[0x07]#
0x00070001: Safety controller switch to config mode fail
详细错误描述 |
处理意见 |
|---|---|
Safety communication state not in OP |
请先对机械臂进行下电下使能操作 |
Operation timeout |
安全板异常,确认此时安全板状态,重启控制柜 |
0x00070002: Safety controller exit config mode error
详细错误描述 |
处理意见 |
|---|---|
Safety in failure state |
安全板异常,确认此时安全板状态,重启控制柜 |
0x00070003: Set safety parameters tag error
详细错误描述 |
处理意见 |
|---|---|
Operation timeout |
安全板异常,确认此时安全板状态,重启控制柜 |
0x00070004: Apply safety parameter error
详细错误描述 |
处理意见 |
|---|---|
Operation timeout |
安全板异常,确认此时安全板状态,重启控制柜 |
0x00070005: Set safety parameters error
详细错误描述 |
处理意见 |
|---|---|
Safety parameters download fail, 0x******** |
通讯层异常,检查控制柜内控制器与安全板间接线, 检查控制柜内安全板与通讯板间接线(DC30控制柜), 重启控制柜 |
Safety parameters upload fail, 0x******** |
|
Safety parameters crc check invalid, 0x******** |
通讯层异常,检查安全板状态, 检查控制柜内控制器与安全板间接线, 检查控制柜内安全板与通讯板间接线(DC30控制柜), 重启控制柜 |
0x00070006: Abort set safety parameters error
详细错误描述 |
处理意见 |
|---|---|
Operation timeout |
重启控制柜 |
末端板问题[0x08]#
0x00080001: Set toolboard digital output fail
详细错误描述 |
处理意见 |
|---|---|
确认输出端口号是否正确 |
0x00080002: Set toolboard io mode error
详细错误描述 |
处理意见 |
|---|---|
Mode parameter download fail |
1.确认输出端口号是否正确;2.确认端口的当前模式 |
0x00080003: Config toolboard reuse interface error
详细错误描述 |
处理意见 |
|---|---|
Port parameter download fail |
确认当前的接口模式 |
Baud rate parameter download fail |
0x00080004: Update toolboard firmware error
详细错误描述 |
处理意见 |
|---|---|
Firmware upload fail |
1.确认升级包是否受损;2.重新进行升级操作 |
0x00080005: Change toolboard recipe failed
详细错误描述 |
处理意见 |
|---|---|
重新制作配方 |
0x00080006: Config toolboard interface name failed
详细错误描述 |
处理意见 |
|---|---|
1.修改名称;2.确认配置的接口号 |
0x00080007: Tool 485 write fail
详细错误描述 |
处理意见 |
|---|---|
Occupied by real cycle or insert the queue fail |
等待当前任务完成 |
0x00080008: Tool 485 read fail
详细错误描述 |
处理意见 |
|---|---|
Occupied by real cycle or insert the queue fail |
等待当前任务完成 |
0x00080009: Set tool led light brightness fail
详细错误描述 |
处理意见 |
|---|---|
Configuration parameter write fail |
确认当前机械臂是否末端板损坏, 确认当前机械臂末端板中是否存储了机械臂参数, 确认机械臂末端板状态,确认机械臂末端板接线, 重启控制柜 |
Modbus通讯问题[0x09]#
0x00090001: Add modbus device failed
详细错误描述 |
处理意见 |
|---|---|
0x00090002: Delete modbus device failed
详细错误描述 |
处理意见 |
|---|---|
0x00090003: Add modbus signal failed
详细错误描述 |
处理意见 |
|---|---|
0x00090004: Delete Modbus signal failed
详细错误描述 |
处理意见 |
|---|---|
0x00090005: Update modbus signal failed
详细错误描述 |
处理意见 |
|---|---|
0x00090006: Write modbus value failed
详细错误描述 |
处理意见 |
|---|---|
DataComm[0x0A]#
0x000A0001: Tcp socket open fail
详细错误描述 |
处理意见 |
|---|---|
socket name already exist or socket num limit exceeded; socket open fail;socket open timeout |
1.检查是否有同名socket端口打开; 2.检查socket |
0x000A0002: Tcp socket close fail
详细错误描述 |
处理意见 |
|---|---|
close socket fail;socket name doesn’t exist |
检查socket端口是否已经关闭 |
0x000A0003: Tcp socket write fail
详细错误描述 |
处理意见 |
|---|---|
socket name doesn’t exist;socket write fail |
确认所操作的socket名称 |
0x000A0004: Tcp socket read fail
详细错误描述 |
处理意见 |
|---|---|
socket name doesn’t exist |
确认所操作的socket名称 |
0x000A0005: 485 write fail
详细错误描述 |
处理意见 |
|---|---|
in real cycle or insert the queue fail |
等待当前任务完成 |
0x000A0006: 485 read fail
详细错误描述 |
处理意见 |
|---|---|
in real cycle or already in use |
等待当前任务完成 |
0x000A0007: CAN write fail
详细错误描述 |
处理意见 |
|---|---|
in real cycle or data length incorrect |
检查CAN的配置信息是否正确 |
0x000A0008: CAN read fail
详细错误描述 |
处理意见 |
|---|---|
in real cycle |
检查CAN的配置信息是否正确 |
EtherCAT通讯监控[0xA0]#
0x00A00001: Communication error
详细错误描述 |
处理意见 |
|---|---|
code:0x13xxxxxx(busdevice报错id) -0xxxxxxxxx(acontis错误id) |
记录busdevice报错id及acontis错误id, 重启控制柜,若问题无法消除,联系研发 |
安全功能监控[0xA1]#
0x00A10000: Unknown joint movement detected during robot power off status
详细错误描述 |
处理意见 |
|---|---|
Please verify current joint position accuracy |
确认机器人示教器模型上显示位置与真实机器人 位置是否匹配,确认无误后根据提示引导确认后, 继续操作机械臂,不匹配则断电停止使用并联系研发 |
0x00A10001: Safety function violation detected
详细错误描述 |
处理意见 |
|---|---|
安全错误描述-0x********(安全错误代码) |
详情请见安全功能错误码,针对频繁出现的速度类 安全问题,优先考虑是由于机器人振动引起的速度波动 导致的安全监控报错,在评估现场工况允许的条件下 尝试使用振动控制功能 |
0x00A10002:
详细错误描述 |
处理意见 |
|---|---|
0x00A10003: Safety soft protection triggered
详细错误描述 |
处理意见 |
|---|---|
Stop x triggered - protection message |
检查安全输入触发原因,详情请见安全功能错误码, 若非安全输入触发原因,针对频繁出现的速度类安全问题, 优先考虑是由于机器人振动引起的速度波动导致的安全监控报错, 在评估现场工况允许的条件下尝试使用振动控制功能 |
0x00A10004: Collision detection triggered
详细错误描述 |
处理意见 |
|---|---|
Safety collision reaction triggered - Joint * / Robot tool / Robot base encountered a collision |
1.检查机械臂是否与外界发生碰撞,检查工具、 管线包等因素是否对机械臂正常运行产生影响等; 2.检查是否设置的负载质量与质心参数与实际工况相差较大; 3.检查安装方向设置与机械臂实际安装方向是否存在较大偏差; 4.检查是否抱闸失灵。 |
0x00A10005: Safety function parameters invalid
详细错误描述 |
处理意见 |
|---|---|
Safety function parameters need to be updated |
重新执行安全参数配置流程 |
0x00A10006: 3-position enable button loosen
详细错误描述 |
处理意见 |
|---|---|
Stop 2 triggered - 3-position enable button need to be triggered to continue the operation |
检查是否在安全参数中配置了启用外部三位置使能输入, 若是,则检查三位置使能是否正常按下 |
0x00A10007: Need to carry out brake test
详细错误描述 |
处理意见 |
|---|---|
关节错误监控[0xA2]#
0x00A20100: Axis 1 status abnormal
详细错误描述 |
处理意见 |
|---|---|
Axis 1 error detected, code:0x13xxxxxx(busdevice错误id) -0xxxxxxxxx(伺服错误id) |
详情参看伺服错误码 |
0x00A20200: Axis 2 status abnormal
详细错误描述 |
处理意见 |
|---|---|
Axis 2 error detected, code:0x13xxxxxx(busdevice错误id) -0xxxxxxxxx(伺服错误id) |
详情参看伺服错误码 |
0x00A20300: Axis 3 status abnormal
详细错误描述 |
处理意见 |
|---|---|
Axis 3 error detected, code:0x13xxxxxx(busdevice错误id) -0xxxxxxxxx(伺服错误id) |
详情参看伺服错误码 |
0x00A20200: Axis 4 status abnormal
详细错误描述 |
处理意见 |
|---|---|
Axis 4 error detected, code:0x13xxxxxx(busdevice错误id) -0xxxxxxxxx(伺服错误id) |
详情参看伺服错误码 |
0x00A20200: Axis 5 status abnormal
详细错误描述 |
处理意见 |
|---|---|
Axis 5 error detected, code:0x13xxxxxx(busdevice错误id) -0xxxxxxxxx(伺服错误id) |
详情参看伺服错误码 |
0x00A20200: Axis 6 status abnormal
详细错误描述 |
处理意见 |
|---|---|
Axis 6 error detected, code:0x13xxxxxx(busdevice错误id) -0xxxxxxxxx(伺服错误id) |
详情参看伺服错误码 |
串口数据监控问题[0xA3]#
0x00A30001: Port parameters read error
详细错误描述 |
处理意见 |
|---|---|
Cannot read serial port existing parameters |
检查控制柜内部串口通讯线 |
0x00A30002: Set port parameters error
详细错误描述 |
处理意见 |
|---|---|
Cannot set serial port parameters |
检查控制柜内部串口通讯线 |
0x00A30101: Serial port open failed
详细错误描述 |
处理意见 |
|---|---|
Serial port of power control board open failed |
检查控制柜内部电源管理板串口通讯线 |
0x00A30102: Abnormal communication detected
详细错误描述 |
处理意见 |
|---|---|
Failed to send power control message/ power off message ….. |
检查控制柜内部电源管理板串口通讯线 |
0x00A30103: Abnormal communication detected
详细错误描述 |
处理意见 |
|---|---|
Cannot receive the message from power control board |
检查控制柜内部电源管理板串口通讯线 |
0x00A30104: Power control board error
详细错误描述 |
处理意见 |
|---|---|
Precharge resistor is overheated, please restart |
关机后静置一段时间 |
0x00A30105: Power control board error
详细错误描述 |
处理意见 |
|---|---|
Temperature of Power control board is too high, please restart |
关机后静置一段时间 |
0x00A30106: Abnormal communication detected
详细错误描述 |
处理意见 |
|---|---|
Failed to send restart message |
检查控制柜内部电源管理板串口通讯线 |
0x00A30201: Serial port open failed
详细错误描述 |
处理意见 |
|---|---|
Serial port of teach pendant open failed |
检查控制柜内部示教器连线 |
0x00A30202: Manual movement is not allowed
详细错误描述 |
处理意见 |
|---|---|
Teach pendent button disabled, robot need to be enabled |
启动示教器按钮 |
Websocket接口[0xB0]#
0x00B00001:
详细错误描述 |
处理意见 |
|---|---|
TCPIP接口[0xB1]#
RPC接口[0xB2]#
RPC接口[0xB3]#
编译问题[0xC0-0xC1]#
0x00C00000: compiler error
详细错误描述 |
处理意见 |
|---|---|
详见error说明 |
检查程序逻辑 |
0x00C10001: Task Parameter mismatch
详细错误描述 |
处理意见 |
|---|---|
task_name |
确认任务的参数正确性 |
伺服错误代码#
故障明细 |
故障原因 |
排查方法或处理建议 |
|
|---|---|---|---|
兼容 性错误 |
(#99)Com patibility Err |
驱动器 固件版本过低 CPU1和 CPU2的固 件版本不兼容 |
建议:升级驱动器CPU1和 CPU2的固件版本到最新 |
母 线欠压 |
w0Under_vo ltage_soft (0000 0001) |
电源本身故障 |
检查电源输出是否正常 |
电源功率不够 |
检查大负 载控制柜是否只接入了一个电源 |
||
速度或者 负载过大(常 伴随20硬件故 障或8000电流 环饱和故障) |
检查负载和轨迹速度是否过大 |
||
驱 动器器件脱落 驱动器 器件焊接错误 |
排除以上问题后尝试换驱动器 |
||
母 线过压 |
w1Over_vo ltage_soft (0000 0002) |
电源电压故障 |
检查电源电压是否在工作范围内 |
制 动板卡未接入 |
检查制动板卡是否接入 |
||
过 压保护部分的 硬件电路不对 驱动器器件脱 落或焊接错误 |
排除以上问题后换驱动器 |
||
过速 |
w3 Over_Speed (0000 0008) |
ABS编码器 异常或INC编 码器存在故障 |
参照5.5章 节,根据ABS与INC错误信息,有 针对性地检查相应传感器及线束 |
驱 动板温 度传感 器故障 |
w4I GBTTemp_se nsor_error (0000 0010) |
热敏电阻缺 失或焊接错误 |
更换驱动器 |
硬件 过流/欠 压/过压 |
w5Hard ware_error (0000 0020) |
UVW松 动或接触不良 |
若电流波形时而 会变成0,检查UVW接线是否牢固 |
INC线序接 反或丢脉冲 |
检查INC接线是否正确,码盘是否 有划痕,安装是否合格;查询排 查INC丢码情况 |
||
若运行 中出现,同时 出现1欠压或 者8000电流环 饱和故障,可 能原因为母线 电压异常跌落 |
示波器观察母线电压是否正常 |
||
参数 不对导致电流 震荡引起过流 |
确认伺服参数 |
||
上位机检 测到碰撞后, 回退的加速指 令过大;用户 轨迹加速度、 速度过大; |
检查1og文件 是否同时触发了碰撞检测; 检查用户轨迹的参数设置。 |
||
电源 功率不足,均 流模块有问题 (如整臂所有 关节同时报该 故障的情况) |
更换电源或均流模块 |
||
驱 动板硬件问题 |
若以上均确认正常,更换驱动器 |
||
编码器异常 |
查询ABS状态 |
||
位置误 差超限 |
w6Posi_ Error_Over (0000 0040) |
电机本身的三 相线线序接反 |
检查电机三相线线序是否接反 |
UVW紧 固力度太大导 致三相线断裂 |
检查电机三相线是否断裂 |
||
INC线束 接反、读头码 盘安装间隙有 问题、径向安 装距离有问题 、码盘受污染 |
逐一排查INC编码器(线束 线序、码盘、安装距离、读头) |
||
驱动 板过温 |
w7IGB T_Overtemp (0000 0080) |
环 境温度过温、 热敏电阻损坏 |
停止运行一段时间待温度 降下来后上电看是否仍过温,若 不再过温,说明之前环境温度超 过阈值,若仍过温,更换驱动器 |
自检 不通过 |
w8SelfTest (0000 0100) |
驱动板 上电自检失败 |
断 电重启,若仍旧报错,联系研发 |
以太 网通讯 超时 |
w9No _MotionCMD (0000 0200) |
ECAT网 线损坏或接插 件端子损坏( 如卡扣破损) |
尝试换网线;尝试换驱动器 |
如断通讯后, 冷却一会儿通 讯自行恢复: 电源芯片过温 导致DSP复位 |
检查是否环境温度过高 |
||
彻底断 通讯,重新上 电后可恢复: 通讯模块过温 |
检查是否环境温度过高 |
||
U相电 流传感 器故障 |
w10C urrentu_se nsor_error (0000 0400) |
硬件相关故障 |
更换驱动器 |
ABS编 码器数 据无效 |
w11ABS_da ta_invalid (0000 0800) |
硬件相关故障 |
参照5.5章节,根据 ABS错误信息,检查线束、编码器 ;如果排除无问题,更换驱动器 |
母线电 压传感 器故障 |
w12 Voltage_se nsor_error (0000 1000) |
母线电压传感 芯片未焊、焊 接错误或损坏 |
更换驱动器 |
ABS编 码器连 接异常 |
w13ABS_lo st_connect (0000 2000) |
ABS编码器 线束接触不良 |
更换ABS线束 |
驱 动板接插件损 坏或接触不良 |
更换驱动板 |
||
电流 采样模 块故障 |
w14Cu rr_samp_mo dule_error (0000 4000) |
硬件相关故障 |
更换驱动器 |
电 流环饱 和故障 |
w15 Saturation (0000 8000) |
电 源柜均流模块 未接入,大速 度和加速度工 况下功率不足 导致电压跌落 |
检查大 负载柜是否只接了一个电源模块 |
电 机某一相断掉 |
检查电机三相线是否紧固 |
||
指令加速 度/速度过高 |
检查用户轨迹参数设置 |
||
MOSFET损坏 或电流采样芯 片等器件脱落 |
更换驱动器 |
||
硬件版 本错误 |
w16Hardw areVersion (0001 0000) |
硬 件版本号未烧 写或烧写错误 |
返回来料检工位处理 |
电 机过温 |
w18Mot orOverHeat (0004 0000) |
电磁铁未弹开 |
检查电磁铁是否弹开 |
指令速度 /加速度过大 |
检查用户轨迹 |
||
INC故障; 电机三相 线序接反;参 数文件错误 |
检查INC丢码,检查电 机三相线序,并确认参数文件 |
||
主控芯 片过温 |
w20DS P_OverTemp (0010 0000) |
DSP过温 |
环境温度过高 |
双编 码器校 验错误 |
w21E ncoderHall CrossCheck (0020 0000) |
关节减速机 减速比设置不 正确、ABS或 INC相关故障 |
重新配置关节减速比或者检查减 速机型号、参照第5.5章节排查编 码器问题并进一步有针对性定位 |
ABS编码 器CRC校 验错误 |
w22ABS _CRC_error (0040 0000) |
ABS读头 型号不匹配或 信号受干扰、 伺服参数不对 |
更换线束 ,确保读头正确、确认伺服参数 |
AB S编码器 数据濒 临无效 |
w24ABS_da ta_warning (0100 0000) |
硬件相关 |
参照第5.5章节明确根源 |
IN C编码器 丢脉冲 |
w2 5INC_error (0200 0000) |
I NC码盘受污染 |
如码盘受污染,擦拭码盘 |
I NC安装有问题 |
使用IN C专用检测仪测试,如同样报错, 调整读头轴向/径向位置,调整码 盘的装配,调整读头和码盘间隙 |
||
接插件松动 |
接插件进行上胶固定 |
||
驱 动器硬件电路 错误(未去除 上下拉电阻) |
更换驱动板 |
||
线束有问题 |
换线束 |
||
驱动板故障 |
排除以上故障后更换驱动板 |
||
V相电 流传感 器故障 |
w27C urrentv_se nsor_error (0800 0000) |
硬件相关故障 |
更换驱动器 |
W相电 流传感 器故障 |
w28C urrentw_se nsor_error (1000 0000) |
硬件相关故障 |
更换驱动器 |
寻 相失败 |
w29 HallLess_D oubleCheck (2000 0000) |
INC线束 顺序错误 |
检查INC线束顺序是否正确 |
INC 读头和码盘 间隙不合格 |
要检测确保合格 |
||
INC线束上的焊 接头被折弯导 致读数问题 |
更换未折弯线束 |
||
电机 本身三相线 UVW线焊反 |
将UV W调整成正确的接法接入驱动器 |
||
参数文件不对 |
确认参数文件 |
||
INC编 码器丢Z |
w30INCnoZ (4000 0000) |
INC码盘盘 片设计问题 |
更换正确的INC码盘 |
INC盘片径 向安装问题 |
重新安装INC盘片和 读头,并控制好电机径向跳动 |
||
电 磁铁电 路过流 |
w31Br akeOverCur (8000 0000) |
过温或 电源功率不足 导致电压跌落 |
驱动板掉电放置一段 时间后自恢复说明是温度问题; 检查电源是否只接了一路或 用户指令轨迹速度/加速度过大。 |
伺服报错信息详解#
机械臂控制器在故障发生时会自动查询各轴的内部故障字(前提是机械臂没有掉电), 导出日志信息可查询到详细的伺服报错信息,如图5.5.1所示。

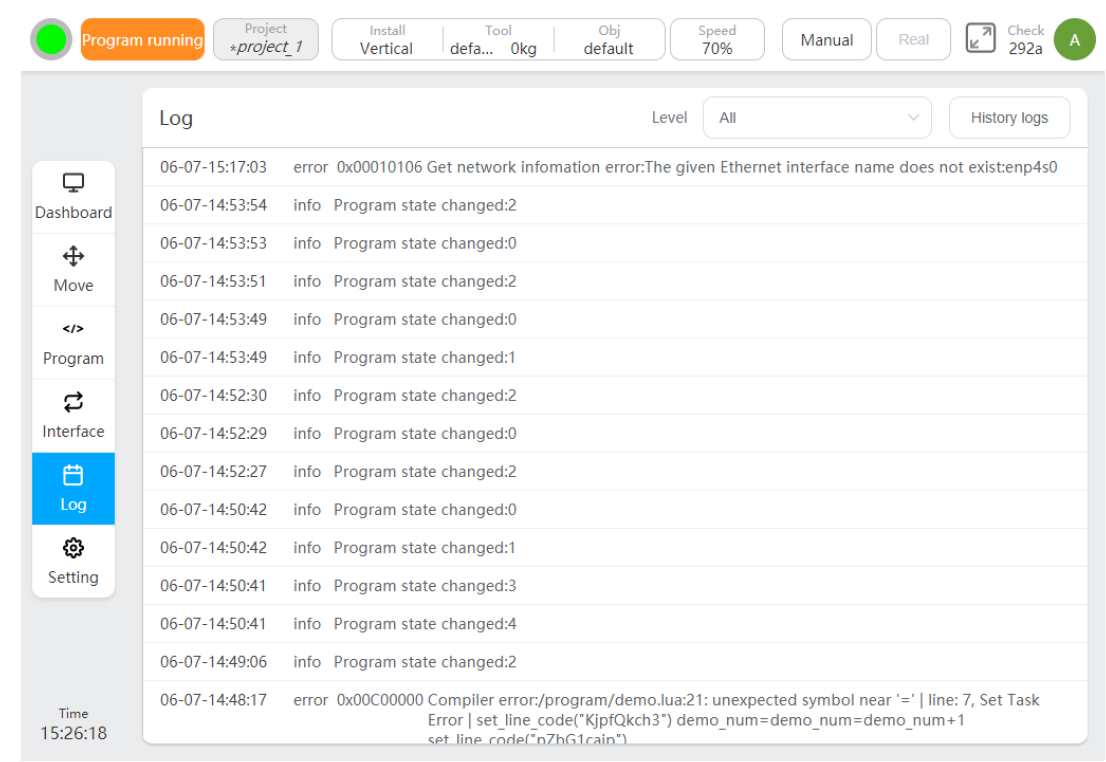 图1 各轴报错信息
图1 各轴报错信息
报错代码的信息含义如下:
a)值1至值10表示报错轴时刻,前10个与INC编码器相关的十六进制数,具体含义及顺序如下:
1)固件自动补偿的脉冲数;
2)上两次Z脉冲之间的脉冲数增量;
3)出现最大丢码数时前两次Z脉冲之间的脉冲数增量;
4)故障之前最近一次Z脉冲对应的编码;
5)~9)最近5次Z脉冲对应的编码(1圈0~FFFF);
10)Z脉冲对应的参考编码(1圈0~FFFF);
b)值11至值15为十六进制数,对应的含义如下:
11)从上次清除故障或上次上电开始的(INC编码器读到的)历史最大丢码值;
12)ABS故障码;
13)伺服故障报警之前持续出现的电流环饱和时间(100us内);
14)历史故障LOG高4位信息;(参考第5.4章节)
15)历史故障LOG低4位信息;(参考第5.4章节)
c)值16为十进制数含义如下:
16)上电以来曾经连续丢过的最大EtherCAT帧数(最大不超过4);
关节故障信息查询方法#
关节故障信息的查询方法如下:
a)INC编码器丢码信息查询
以Axis1为例,可参考图 1 中的11):从上次清除故障或上次上电开始的历史最大丢码值,其解释如下:
读数的定义:从上次清除故障或上次上电开始的历史最大丢码值;
换算方法:假设读数为M(换算位十进制),INC单圈线数L; 则:
丢码对应的角度(。)=(M/65536)* 360;
丢码对应的编码器脉冲数=(M/65536)*(L*4);
注意:(1)由于读数头损坏等原因导致编码器脉冲彻底丢失的INC丢码情况,无法检测出来。(2)详细丢码信息可参考记录1)~10)。
b)ABS编码器故障查询
以Axis1为例,可参考图 1 中12):ABS故障码,含义为上电以来所有曾经出现过的故障位,详细报警信息及实例请参照:下图。
c)电流环饱和持续时间查询
以Axis1为例,可参考图 1 中13):伺服故障报警之前持续出现的电流环饱和时间(100us内)。
d)历史故障LOG信息查询
1)高4位信息:以Axis1为例,可参考图 1 中14);
2)低4位信息:以Axis1为例,可参考图 1 中15);
3)将高位信息与低位信息合并成8位16进制数,通过查表可得到故障信息,含义为上次清除故障或上次上电开始的所有出现过的伺服故障(包括被屏蔽掉的故障);
4)具体实例:通过读高位信息0010,通过读低位信息0020;将高位、低位信息并成8位16进制数00100020,查表得到故障信息为:硬件故障、DSP过温。
e)历史EtherCAT丢帧信息查询
以Axis1为例,可参考图 1 中16):上电以来所有曾经连续丢过的帧数(最大不超过4)。

图 2 ABS报错信息
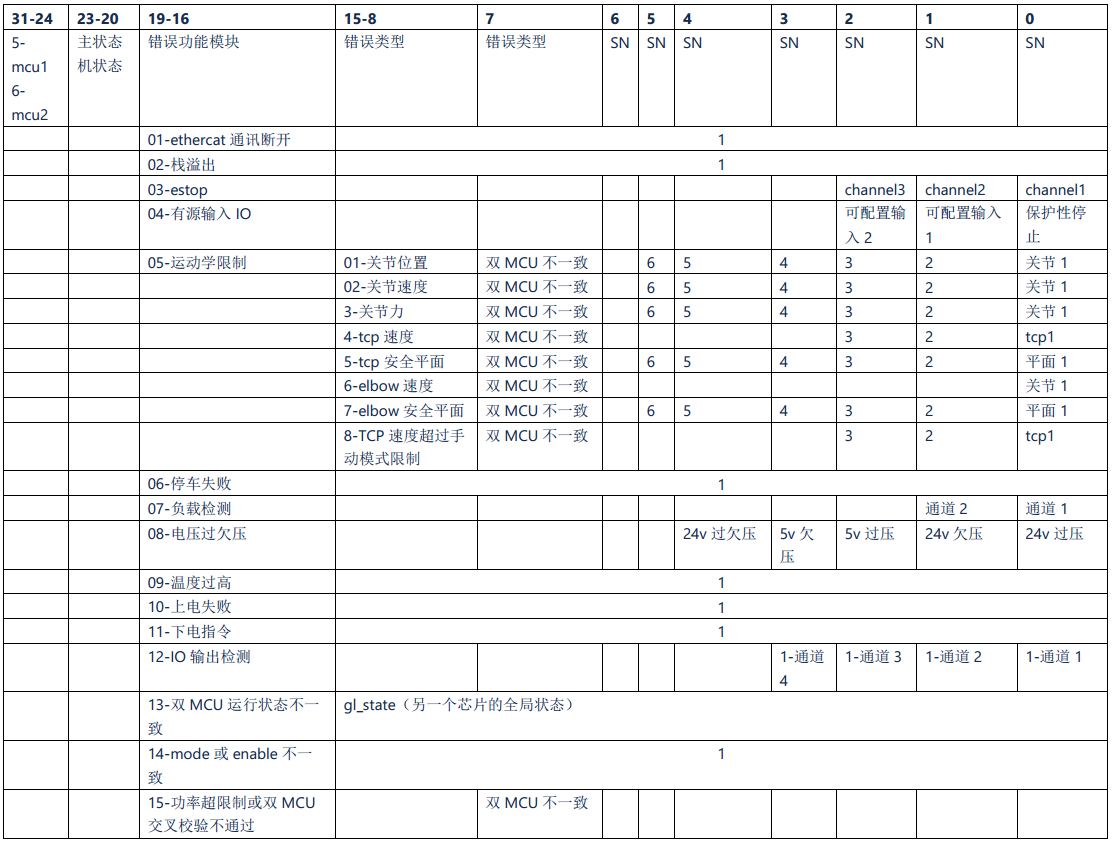
安全控制器报错信息#
安全控制器主状态:
SS_INIT |
0 |
|---|---|
SS_WAIT |
2 |
SS_CONFIG |
3 |
SS_POWER_OFF |
4 |
SS_RUN |
5 |
SS_RECOVERY |
6 |
SS_STOP2 |
7 |
SS_STOP1 |
8 |
SS_STOP0 |
9 |
SS_MODEL |
10 |
SS_REDUCE |
12 |
SS_BOOT |
13 |
SS_FAIL |
14 |
SS_ARM_BOOT |
15 |
安全控制器报错代码表#