维护和维修#
维护维修工作必须严格遵守本手册的所有安全指示。
维护、校准、维修工作必须根据最新的服务手册进行操作。
安全指示#
维护维修后,必须重新对系统的安全级别进行核对。核对时必须遵守有效的标准以及安全法律法规。还应对所有安全功能进行检测,确保能够正常工作。
维护维修工作的目的是为了确保系统正常运转,或在故障状态时,帮助系统恢复正常运转状态。维修包括故障诊断和实际的维修。
维修维护操作时应采取的安全措施包括:
维护前的首要条件:
机器人必须保持关机状态,并具有可防止意外重启的保护措施。
移除主输入电缆以确保完全断电,断开连接的其他能源。采取预防措施以避免系统能源在维修期间重新接通。
重启系统前请检查接地连接是否良好。
等待5分钟,直至中间回路完全放电。避免拆分控制柜内的供电系统。控制柜关闭后其供电系统内仍可留存高压达数小时。
拆分机器人手臂或控制柜时应按ESD准则作业。
气动系统是独立于机器人和夹具的部分系统。机器人主电源关闭后,空气压力仍然存在。必须先切断机器人的电源并释放压力后进行安装或维修夹具。
注意事项:
不要改变软件安全配置中的任何信息(比如力限制)。安全配置在手册中有介绍。如果安全参数变更,整个机器人系统应被视为新系统,这就意味着所有安全审核过程,比如风险评估,都必须更新。
使用部件号相同的新部件或批准的相当部件替换故障部件。
维修维护完成后立即重新激活所有禁用的安全措施。
书面记录所有维修操作,并将其保存在整个机器人系统相关的技术文档中。
维护与清理#
机器人维护#
完成设备调试之后,要按照规定维护期限执行保养工作。 机器人维护期限规定表格
序号 |
维护活动 |
检查方式 |
每 1 个 月 |
每 6 个 月 |
每 12 个 月 |
|---|---|---|---|---|---|
1 |
检查机器人关节后盖及螺栓 |
目视 |
√ |
||
2 |
检查机器人防尘橡胶圈 |
目视 |
√ |
||
3 |
检查机器人本体线缆 |
目视 |
√ |
||
4 |
检查机器人底座安装螺栓 |
功能性检查 |
√ |
||
5 |
检查机器人末端工具安装螺栓 |
功能性检查 |
√ |
||
6 |
检查机器人关节安装螺栓 |
功能性检查 |
√ |
||
7 |
检查灯带密封圈 |
目视 |
√ |
||
8 |
检查关节缝隙处是否有油脂溢出 |
目视 |
√ |
图示为示例,总计共有6组关节需要检查。需要按要求定期检查螺栓划线标记是否完整,结构是否可靠,油脂是否溢出。
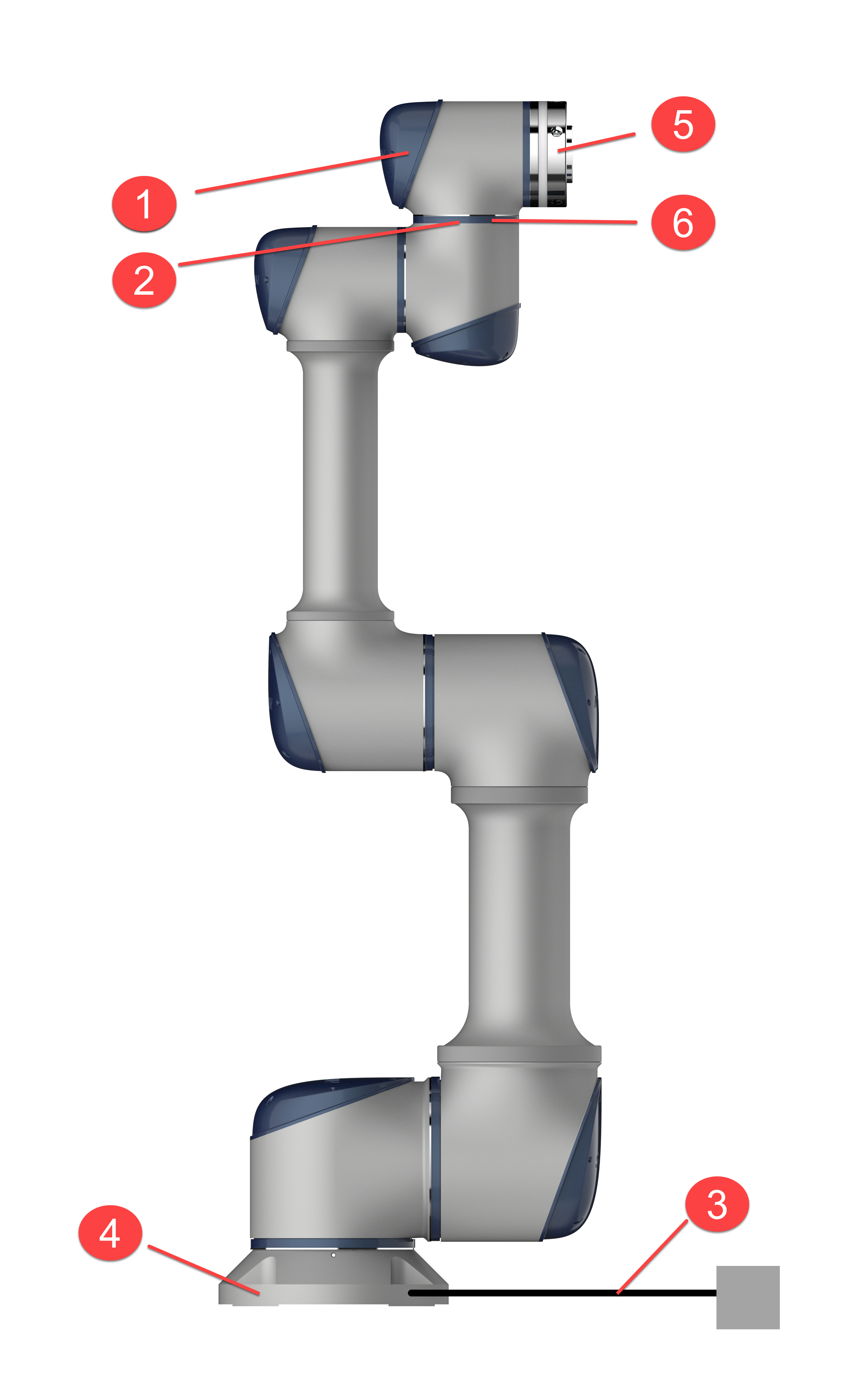
图1 机器人结构示意图
机器人清理#
可以使用清洁布料和水或10%乙醇擦去机器人手臂上观察到的灰尘/污垢/油污。在一些极端情况,可能会有少量的油脂从关节处溢出,这并不影响关节的性能以及寿命。
控制系统维护#
完成设备调试之后,要按照规定维护期限执行保养工作。
控制系统维护期限规定表格
序号 |
维护活动 |
检查方式 |
每 1 个 月 |
每 6 个 月 |
每 12 个 月 |
|---|---|---|---|---|---|
1 |
检查急停 |
功能性检查 |
√ |
||
2 |
检查示教器三位置使能开关 |
功能性检查 |
√ |
||
3 |
检查控制柜安全输入输出 |
功能性检查 |
√ |
||
4 |
检查示教器线缆以及接头 |
目视检查 |
√ |
||
5 |
检查控制柜风扇滤网 |
目视检查 |
√ |
||
6 |
检查控制柜IO端子排 |
功能性检查 |
√ |
||
7 |
检查控制柜电源接口 |
功能性检查 |
√ |
注意:在湿度大于90%的环境中使用时,控制柜需要保持示教器连接,如需拔出示教器使用,请对控制柜示教器接口做必要的防护处理。

图2 控制系统结构示意图
控制柜清理#
控制柜包两侧含两个风扇防护罩,并配备有IP44级滤网,主要用于控制柜内部散热。
注意不同控制柜的放置形式,需要调整控制柜风扇防尘盖方向,否则会影响IP防护等级。

图3 控制柜侧面安装风扇防尘盖示意图
风扇滤网清理操作步骤:
如图4图示,红色框位置有两个豁口,使用小一字螺丝刀插入豁口并向外撬,防尘盖松动后即可取下;
将滤网取出,根据滤网实际情况确认采用低压气体清理或者直接更换滤网,清理滤网时需要多次正反面反复清理,确保滤网清理彻底。

图4 控制柜滤网清理
机器人长期存放后操作#
机器人采用谐波齿轮技术,关节部分密封并具备自润滑功能(在使用寿命内无需更换或添加油脂)。正常运行期间内,润滑油会自然分布在齿轮和轴承周围,以保持机械系统的正常润滑。
机器人在存储或者停止时间超过1个月以上,或者长期关节处于极小范围运动时,建议周期性采取如下措施,这将有助于机器人的使用寿命。
在接通电源前,请将机器人置于室温(如存放在较冷的环境中);
接通机器人电源,使其保持在静止状态30min,这将使机器人达到其内部工作温度并软化润滑脂;
手动模式下,一一缓慢运动所有关节,注意先不要加载任何有效载荷以及工具;
创建一个程序,至少让所有关节缓慢连续运动20min(建议采用默认加速度,速度设置在10°/s左右,并让关节转动尽可能大的角度)。