安全#
概述#
介绍了在安装、使用和维护机器人及其部件时需要注意的安全事项与风险评估等重要信息,进行机器人维护前,用户必须阅读并理解这些信息。
在执行任何操作前,确保已经阅读随设备提供的所有说明文档,特别是危险、警告和注意等可能危及人身安全和设备安全的说明,以最大限度减少事故发生几率。当本文内容与随设备发货的文档有差异时,请以随设备发货的文档为准。
负责安装和维护设备的人员必须是经过培训并且已经掌握了正确操作方法和所有安全预防措施的专业人员。只有经过培训的合格人员才能执行设备安装和维护操作。
有效范围与责任说明#
该信息不包含如何设计、安装和操作完整的机器人系统,也不包含可以影响整个系统的安全的所有外围设备。为了保护人员安全,必须设计完善的系统,并且必须按照机器人安装所在国家/地区的标准和法规中规定的安全要求进行安装。
机器人集成商应负责确保机器人系统遵守所在国家或地区的适用安全法律和法规,并且用于保护机器人系统操作者的必要安全设备设计合理且安装正确。
具体包括但不限于以下几点:
确保机器人系统符合所有基本要求;
对完整的系统执行风险评估;
确保整个系统的设计安装准确无误;
在软件中进行合适的安全设置,并确保不会被用户修改;
制定详细的操作说明;
出具符合性声明;
将所有信息收集到技术文件中;
在安装的机器人系统上标贴集成商的标志和联系信息。
中科新松有限公司致力于提供可靠的安全信息,除非中科新松有限公司在提供可靠安全信息方面存在故意或重大过失,否则中科新松有限公司对此不承担责任。需要明确的是,即使一切操作都按照安全操作进行,也无法确保机器人系统不会造成用户的人身和财产损失。
因以下原因造成的用户损失,中科新松有限公司将不对此承担责任:
不可抗力事件(例如,自然灾害、火灾、战争等);
机器人系统自然损坏或磨损;
现场运行环境(例如,电压、温度、湿度等)或外部因素(例如,外部干扰等)不能满足已提示的正常运行的环境要求;
机器人系统未正确安装(包括搬迁后未重新正确安装);
由于用户或第三方的故意或疏忽、使用不当(包括用户未按本用户手册和/或中科新松有限公司其他要求使用)或蓄意破坏行为。
除非另有约定,因使用机器人系统所造成的间接、特殊、偶发损失,包括但不限于收入损失、实际或预期收益损失、业务损失、机会损失、商誉损失、名誉损失、数据的丢失、损坏或泄露等,中科新松有限公司均不对此承担责任。
风险评估#
风险评估是集成商必须完成的最重要任务之一。机器人本身是一个部分完成的机械,而机器人安装的安全性取决于该机器人是如何集成的(例如:工具、障碍物及其他机械)。
建议集成商按照标准ISO12100(GB 15706)和ISO10218-2(GB 11291.2)中的规定执行风险评估。另外,可选择技术规范ISO/TS 15066 (GB/T 36008)作为附加指引。集成商执行风险评估时应考虑机器人整个应用寿命期间的所有工作程序,包括但不限于:
在开发机器人安装时示教机器人;
故障诊断和维护;
机器人安装的正常操作。
风险评估必须在机器人手臂第一次通电之前进行。由集成商执行的风险评估的一部分就是识别正确的安全配置设置,以及确定是否需要额外的紧急停止按钮和其他保护措施。
下列明确了集成商必须要考虑的重大危险。请注意,特定机器人设备可能还存在其他重大危险。
手指被夹在机器人关节4和关节5之间。
工具或工具连接器上的锐边和尖点刺伤皮肤。
机器人轨迹附近障碍物上的锐边和尖点刺伤皮肤。
因机器人有效负载与坚固表面之间的冲击而导致扭伤或骨折。
因用于固定机器人手臂或工具的螺栓松动而导致的后果。
物品从工具上掉落,例如因夹持不到位或断电。
因不同机器上紧急停机按钮不同而出现的操作错误。
如果将机器人安装在无法使用其内部安全功能(例如使用危险工具)充分消除风险的非协作机器人应用中,则系统集成商必须根据风险评估安装其他保护装置(例如,使用能够在安装和编程期间对集成商提供保护的保护装置)。因未安装保护装置所导致的损失,中科新松有限公司将不对此承担责任。
安全操作#
紧急停机#
紧急停机是优先于所有其他机器人控制操作的状态,将会导致所有受控的危险停止,从机器人驱动器消除电机供电,在重置前一直保持有效,并且只能通过手动操作来复位。
紧急停止状态意味着动力系统断开,机器人无法运动。用户必须执行还原步骤,即复位紧急停止按钮并按下示教器上的“开机”按钮,以恢复正常操作。紧急停机不可用作风险降低措施,但是可作为次级保护设备。
紧急停机不得用于正常的程序停止,因为这可能会给机器人带来额外的不必要磨损。
安全相关的功能#
安全功能简介#
GCR系列机器人搭载多种内置安全功能以及紧急电气接口的安全I/O、数字和模拟控制信号,用于连接其他机器人及附加的保护装置。

安全功能和接口的使用和配置必须遵循每个机器人应用程序的风险评估
如果机器人发现安全系统中存在的故障或违例(列如紧急停止电路条线被切断或发生安全极限违例),将启动0类停
停止时间应考虑作为应用风险评估的一部分。

使用的安全配置参数与风险评估所确定的不同可导致无法合理消除的危险或无法充分减少风险
确保工具和夹持器连接正确,以避免在电源中断情况下发生危险
末端执行器不受GCR安全系统保护。末端执行器和/或连接电缆的功能不受监控。
停机类别#
根据具体情况,机器人可以启动三种根据IEC60204-1定义的停机类别。这些类别在下表中定义。
停机类别 |
描述 |
|---|---|
0 |
立即切断机器人动力电 |
1 |
立即将各个关节以最 快的加速度降速为0,关节静止后抱闸制动,电机下使能 |
2 |
在保持轨迹的同时将机器人减速 至静止,静止后各个关节保持使能状态,抱闸无动作。 |
停机类别之间的切换:
当执行2类停机时,如果任意时刻触发了机器人控制器报错,或者触发任意安全功能导致需执行1类停机时,会转而执行1类停机。
当执行1类停机时,会同时触发计时器。如果超过500ms之后,机器人的速度仍然超过设定的安全速度,会转而执行0类停机。
安全功能#
下表列出GCR机器人安全功能位于机器人中,但其目的是控制机器人系统,即机器人连接的工具/末端执行器。机器人安全功能用于减少由风险评估确定的机器人系统风险。位置和速度与机器人的底座有关。*
安全功能 |
描述 |
|---|---|
Emergency stop (ES) |
执行SS1 |
Protective stop |
执行SS2 |
Safe Operating Stop (SOS) |
ss2执行完成后会触 发SOS监控,监控当前机器人位置偏移,如果违例触发SS0 |
Joint Safe limited position (SLP) |
根据门限值设置,当关节位置达到 门限值时,触发SS2。如果触发关节限位,则直接触发ss0 |
Joint Safe limited speed (SLS) |
根据门限值设置,当关节速度达到门限 值时,触发SS2。如果触发关节速度限制,则直接触发ss0 |
TCP position limit |
可以设置安全区域限制机器人 的作业区域,根据门限值设置,当到达门限值时,触发SS 2。如果触发安全区域限制后,安全控制器直接触发ss0。 |
Tcp speed limit |
根据门限值设置,当达到门限值时,触发 SS2。如果触发Tcp速度限制,安全控制器直接触发ss0 |
elbow pos limit |
根据 门限值设置,当达到门限值时,触发SS2。如果触发elbow 位置限制,安全控制器直接触发ss0 |
elbow speed limit |
根据 门限值设置,当达到门限值时,触发SS2。如果触发elbow 速度限制,安全控制器直接触发ss0 |
joint force limit |
根据门限值设置,当达到门限值时,触 发SS2。如果触发关节力矩限制,安全控制器直接触发ss0 |
tcp force limit |
根据门限值设置,当达到门限值时, 触发SS2。如果触发末端力限制,安全控制器直接触发ss0 |
elbow force limit |
根据 门限值设置,当达到门限值时,触发SS2。如果触发elbow 力限制,安全控制器直接触发ss0 |
安全功能 |
描述 |
|---|---|
power limit |
根据门限值设置,当达到门限值时, 触发SS2。如果触发功率限制,安全控制器直接触发ss0 |
mode switch input |
可以选 择是否启动,禁用该物理输入时,可以通过UI切换;但 不可以两者同时有效。模式切换时触发SS2,如果当前正 在运行脚本,脚本处于暂停状态,后续可以继续运行。 |
enable device input |
可以选择是否启用该输入。该输入 只在手动模式下有效,自动模式下无效。违例触发SS2。 |
protective stop input |
各种模式下均有效 ,触发SS2。如果未激活安全防护复位输入。信号消失后 ,自动复位,否则需要触发安全防护输入才可以复位。 |
protective stop reset input |
可以选择是否该信 号输入复位。如果激活了安全防护复位,当触发安全防 护停止,并且触发信号消失后,需要该通道信号输入, 才可继续运动。上升沿有效,并且高电平需要保持500ms |
automatic protective stop input |
仅在自动模 式下有效,触发SS2。信号消失后,安全模式恢复normal |
automatic protective stop reset input |
和protective stop reset input相似,只是对于automatic protective stop input 触发的防护性停止有效。 |
system emergency stop output |
只有系统急停触发情况下,才会输出该信号 |
protective stop output |
防护性停止输出,当触发protective stop input输入时, 输出该信号 |
automatic protective stop output |
自动模式防护停 止输出,只有自动模式下防护停止,才会输出该信号。 |
reduce mode |
触发缩减模式,采用缩减模式相关参数。 |
reduce mode output |
全局情况下,均可以输出该信号。 |
recovery mode |
超 过关节限位,或者tcp限位时,需要重启进入恢复模式。 recovery mo de限制关节速度不超过30deg/s,末端速度不超过250mm/s |
夹伤与碰撞风险#
机器人实际运行过程中仍然存在碰撞检测功能盲区,用户务必需要注意在特殊工况下碰撞检测失效或夹伤风险。典型的三类工况如下所述。
 工况一:机器人末端位置距离机器人基座中心超过约一定范围外时(参见下图具体型号–距离a),此时若机器人按照图1与图2所示红色箭头方向移动,机器人对运动方向上外力敏感度较低,较易发生夹伤危险;当机器人按照图1与图2所示绿色箭头方向产生移动,此时若机器人与外界环境发生碰撞,则对碰撞产生的外力较为灵敏。
工况一:机器人末端位置距离机器人基座中心超过约一定范围外时(参见下图具体型号–距离a),此时若机器人按照图1与图2所示红色箭头方向移动,机器人对运动方向上外力敏感度较低,较易发生夹伤危险;当机器人按照图1与图2所示绿色箭头方向产生移动,此时若机器人与外界环境发生碰撞,则对碰撞产生的外力较为灵敏。
型号 |
距离a mm |
|---|---|
GCR3-620 |
500 |
GCR5-910 |
750 |
GCR7-910 |
750 |
GCR10-1300 |
1000 |
GCR10-2000 |
1500 |
GCR12-1300 |
1000 |
GCR14-1400 |
1000 |
GCR16-960 |
750 |
GCR20-1100 |
900 |
GCR25-1800 |
1300 |
图1 工况一机器人正视图
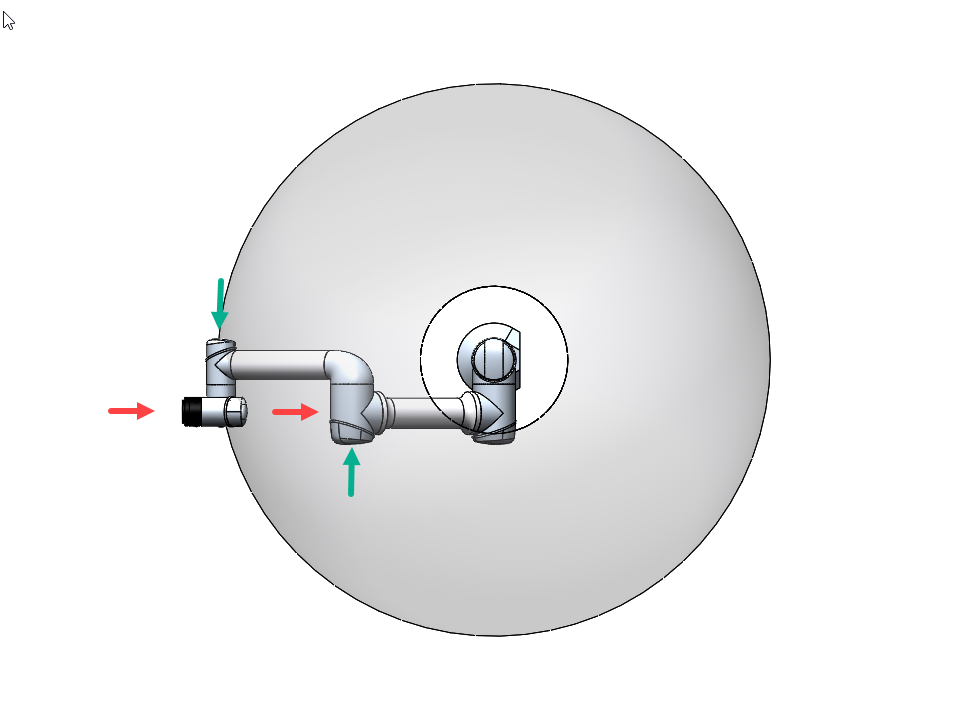
图2 工况一机器人俯视图
工况二:以机器人基座Z方向为中心,半径约较小的范围内(参见下图具体型号–距离b),若接触点在该范围内且接触力方向与关节二、关节三间连杆所在平面垂直,则碰撞检测功能较难检测机器人与外界发生的碰撞。如图2.6.3与图2.6.4中红色箭头所示;此时若机器人与外界接触力方向与基座标Z方向较一致,则机器人对碰撞产生的外力较为灵敏,如图2.6.3中绿色箭头所示。

型号 |
距离b mm |
|---|---|
GCR3-620 |
150 |
GCR5-910 |
200 |
GCR7-910 |
200 |
GCR10-1300 |
350 |
GCR10-2000 |
500 |
GCR12-1300 |
350 |
GCR14-1400 |
500 |
GCR16-960 |
350 |
GCR20-1100 |
500 |
GCR25-1800 |
600 |
图3 工况二正视图
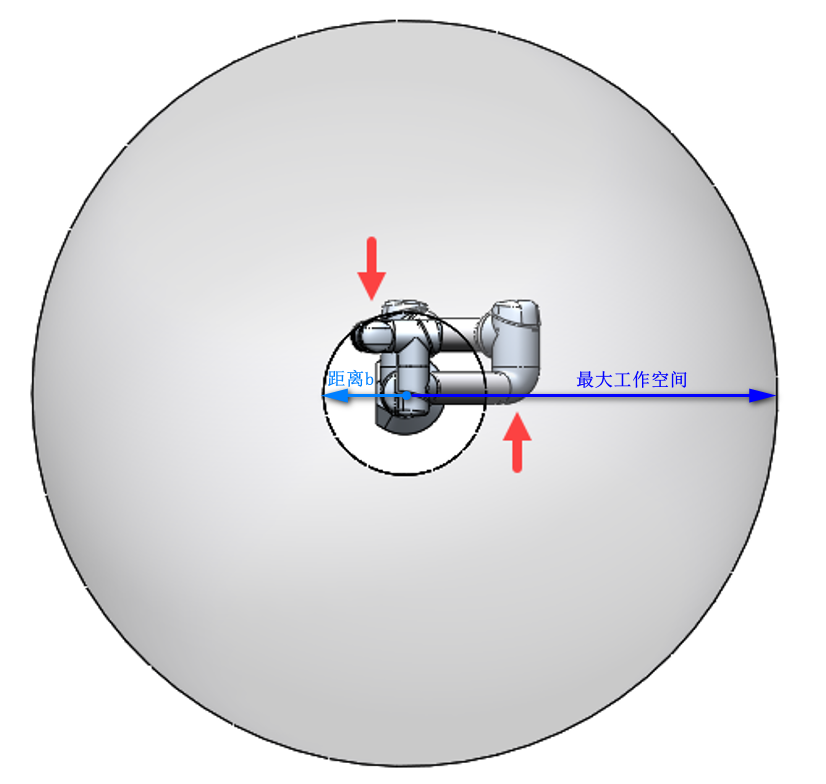
图4 工况二俯视图
工况三:无论机器人处于何种位姿与何种运动状态,当机器人与外界发生碰撞时,若碰撞点位于以机器人基坐原点为中心,半径较小的范围内(参见下图具体型号–距离c),则机器人对该类碰撞较难检测,较易发生夹伤危险,如图2.6.5与图2.6.6中红色箭头所示;当碰撞点位于该范围以外,并且不满足工况一与工况二中所描述的碰撞检测盲区条件时,机器人较易对与外界产生的碰撞进行检测,如图2.6.5与图2.6.6中绿色箭头所示。
型号 |
距离c mm |
|---|---|
GCR3-620 |
150 |
GCR5-910 |
200 |
GCR7-910 |
200 |
GCR10-1300 |
350 |
GCR10-2000 |
500 |
GCR12-1300 |
350 |
GCR14-1400 |
500 |
GCR16-960 |
350 |
GCR20-1100 |
500 |
GCR25-1800 |
600 |
图5 工况三侧视图
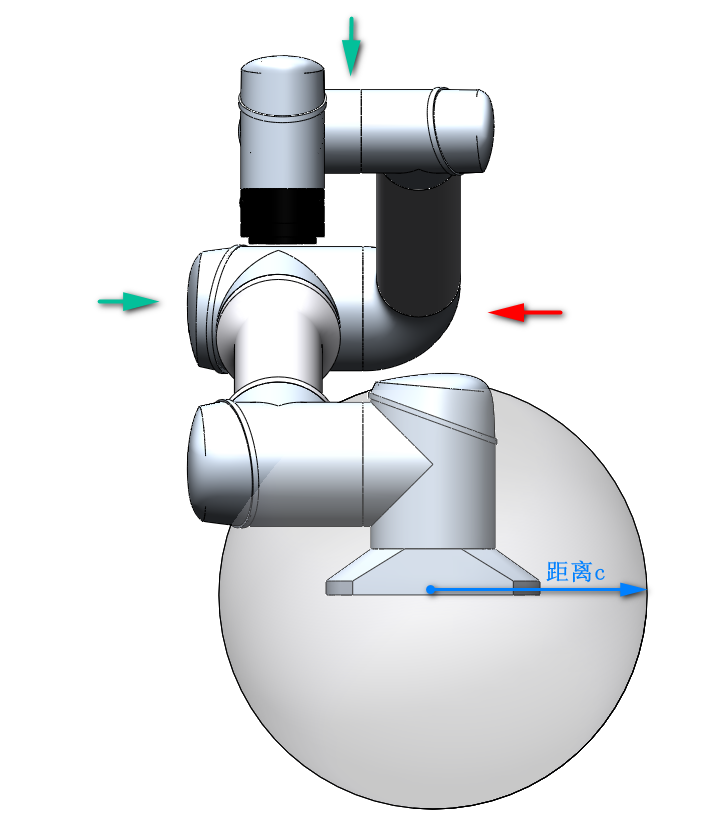
图6 工况三正视图
针对以上所有描述的工况,若机器人在对外部碰撞检测不灵敏的方向上移动,考虑到机器人与外界协作力的限制需求,应尽可能减小此时的运行速度。
机器人奇异点失速风险#
机器人在奇异点附近进行运动规划(直线、圆弧等,不包括关节运动)时会自动降速,示教时应避开奇异点或以关节运动通过奇异点。针对GCR系列构型,存在肩部奇异点、肘部奇异点以及腕部奇异点。
肩部奇异#
当腕关节中心O6处于一关节轴线J1上时,此时造成肩部奇异,导致1关节无解。当O6位于很接近J1的位置时,也会受到奇异的影响,此时移动末端可能导致1关节超速。参考下图为临近肩部奇异位姿。


图7 肩部奇异参考位姿
肘部奇异#
当2、3、4关节轴线J2,J3,J4三个轴线共面时,此时2关节无解。即当3关节临近0度/180度将处于临近奇异位姿,此时移动末端可能造成2关节,3关节,4关节超速。参考下图临近肘部奇异位姿:
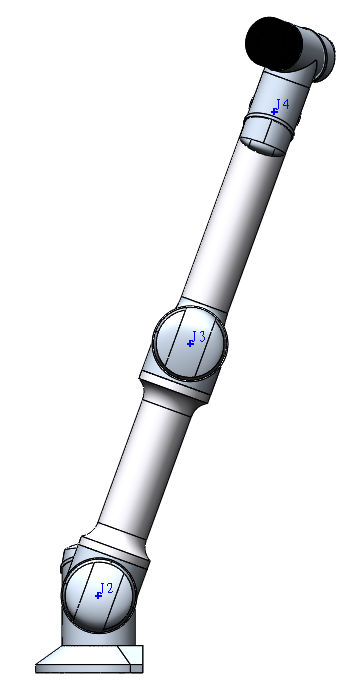
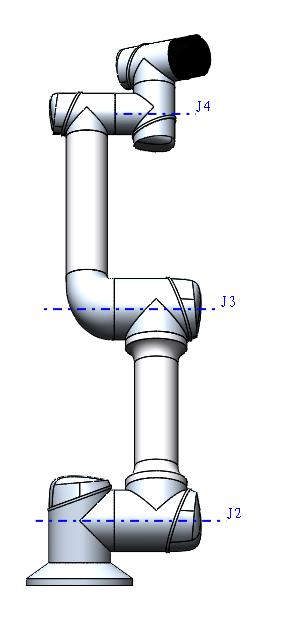
图8 肘部奇异参考位姿
腕部奇异#
当5关节位于0度时,此时关节6无解,造成腕部奇异。5关节靠近0度时为临近腕部奇异姿态,此时移动末端可能造成4关节,5关节,6关节超速。参考下图:
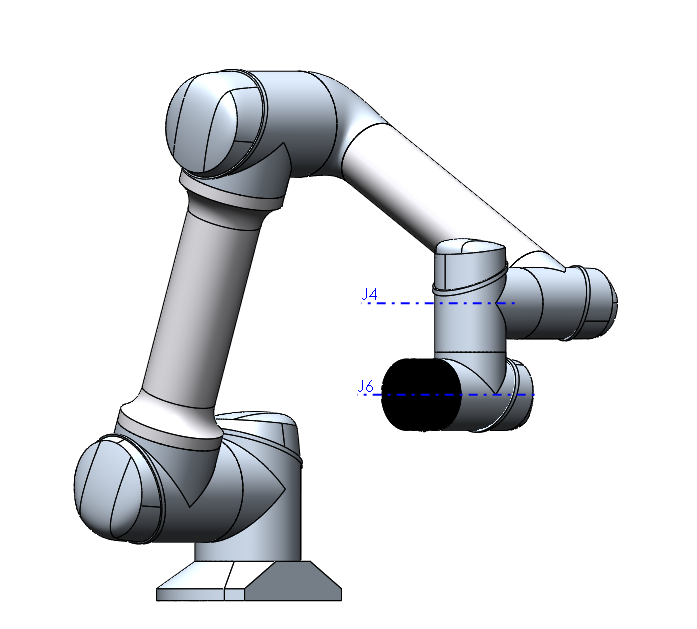

图9 腕部奇异参考位姿
机器人运行到达或接近上述奇异点时,基于笛卡尔坐标的规划运动无法正确的逆解为各轴的关节运动,这将导致机器人无法正确的进行运动规划,此时建议采用关节运动或move j运动指令,避免造成不必要的风险。
请避免在奇异点附近使用直线、圆弧、沿X、Y、Z、RX、RY、RZ方向移动末端等指令,机器人存在失速风险。
对于存在奇异风险的轨迹,必须经过充分安全评估后再运行。