机器人管理#
新建机器人#
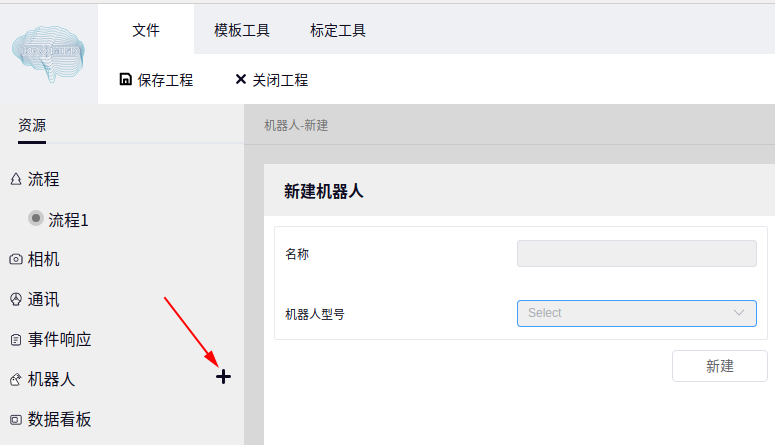
点击机器人后面的 + 号即可弹出 新建机器人 界面, 如下图
在 新建机器人 界面可先输入机器人 名称 然后选择 机器人型号 , 若未输入机器人名称直接选择机器人型号则会生成默认的机器人名称 机器人1 , 如下图
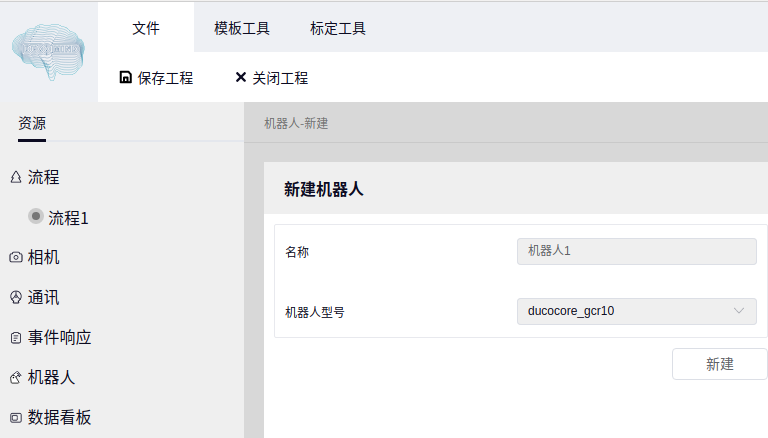
Tip
机器人型号支持两种 ducocore_gcr10 和 ducocore_gcr5
点击 新建 按钮即可新建机器人
机器人配置#
点击想要配置的机器人的名称即可弹出机器人界面, 点击机器人名称后面第一个图标即可更改机器人名称, 如下图:
点击机器人名称后面第二个图标即可删除相应的机器人, 如下图:
在机器人界面, 输入存在的机器人的IP点击 连接 按钮即可连接机器人, 连接 成功后机器人, 连接 按钮会变为 断开 并且连接前面的圆点会由红变绿, 如下图
在机器人数据后面可查看 关节角 或 TCP位姿
Tip
机器人界面的 自动 按钮往右拨表示打开自动连接, 往左拨表示关闭自动连接, 自动连接 功能在打开工程时生效