


方案配置#
通信设置#
点击通讯设置,如下图所示。
点击通信列表的加号,添加串口通讯和图像传输,如下图所示。

配置串口通信,如下图配置即可,串口模式选择RS-485,波特率为115200,数据位为8位,校验位为无校验,停止位为1,如下图所示。

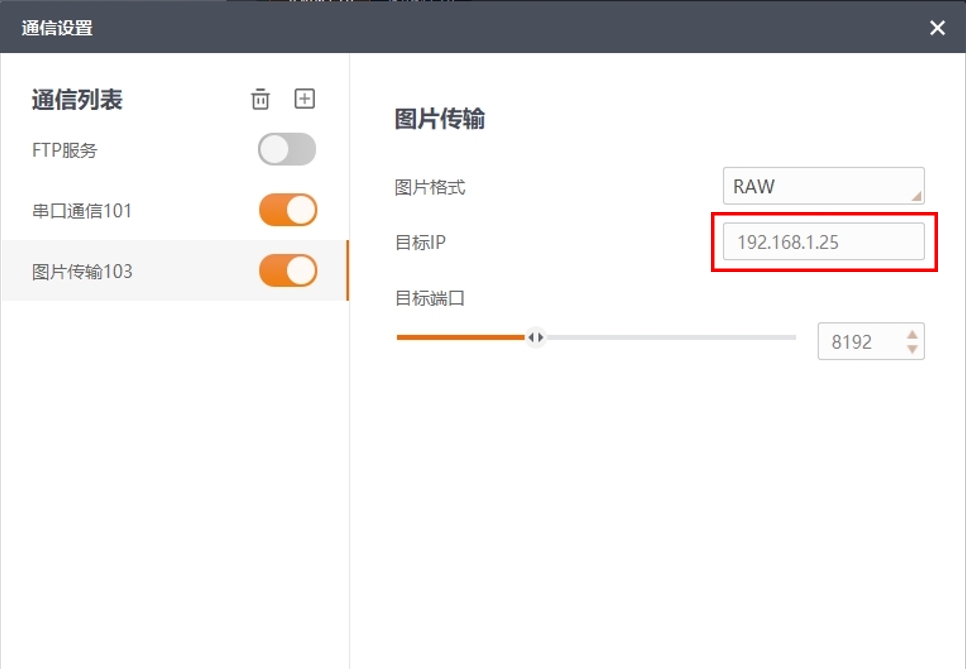
配置图像传输,其中目标IP即为PC客户端配置的Internet协议版本4的IP地址,图片格式为RAW,目标端口为8192,如下图所示。
注意
其中图像传输的目标IP是变量,需要更改为PC电脑端设置的IP,其他都只需要按照图片配置即可。若图像传输和串口通讯配置错误会导致无法自动标定。
方案配置#
默认进入程序,会有一个默认的方案,点击编辑,即可进入方案配置界面,如下图所示,点击编辑进入方案编辑模式。

相机参数配置#
将触发模式改为外部触发,触发源改为通信触发,触发缓存默认关闭状态,触发延时0,通信字符串设置为start(通讯字符串可以自己定义,但必须与机器人插件端输入的字符通信保持一致,否则无法进入运行模式),如下图所示。

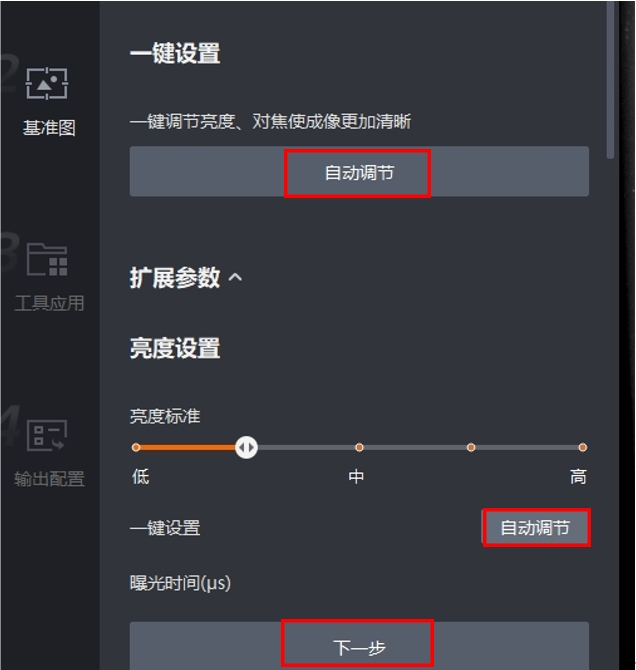
自动调焦:相机焦距光圈等参数调整,只需要点击自动调节即可,如下图所示,如需格外设置,可查看软件用户手册。
注意
闪光灯需要全部打开,默认是全开,高频闪光模式。
基准图配置#
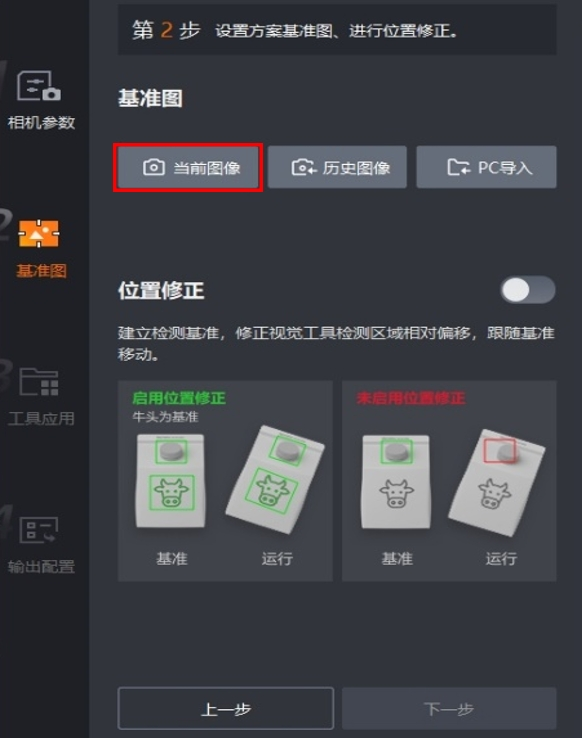
点击下一步,进入基准图配置,选择当前图像,点击确定即可将当前图像设置为基准图,点击下一步。

工具应用配置#
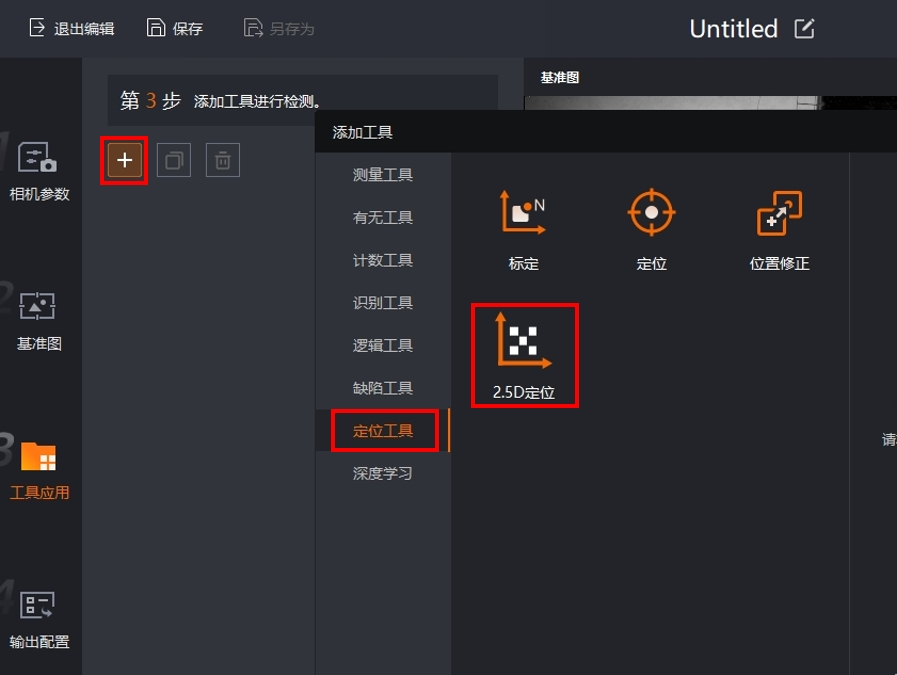
点击加号,选择定位工具,选择2.5D定位即可加载2.5D定位配置界面。如下图所示。
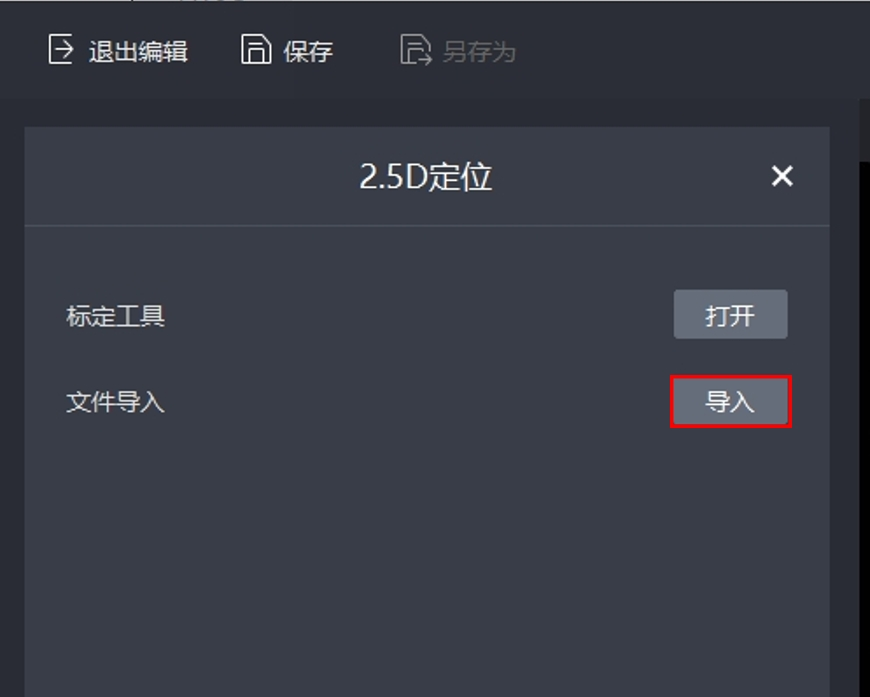
点击2.5D定位即可进入下图界面,其中界面上的打开,即可打开2.5D标定进行配置,文件导入即可,标定和注册成功后,将保存的配置文件导入,用于运行态使用。
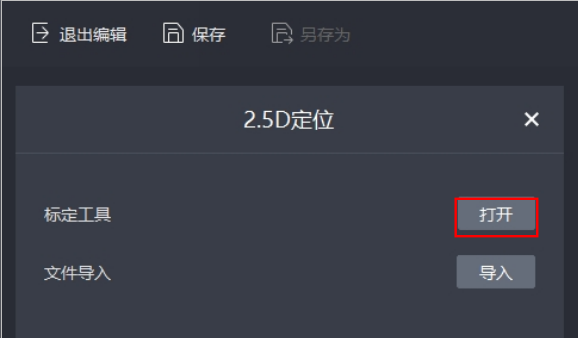
打开2.5D定位配置界面,如下图所示。
标定配置
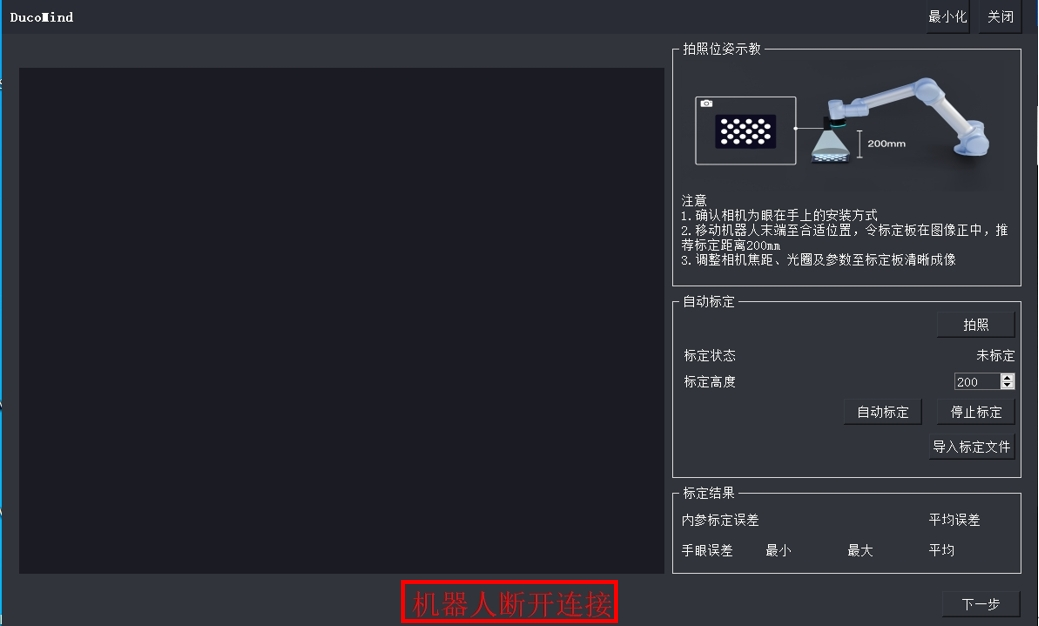
4.1. 首先与机器人建立连接,若未连接,请检查机器人端的插件是否安装成功,若已安装,检查插件模式切换是否正确(即模式切换为:配置模式),若机器人端插件确认安装成功,且模式已修改为配置模式,那么仅需要等5秒,即可建立与机器人连接。
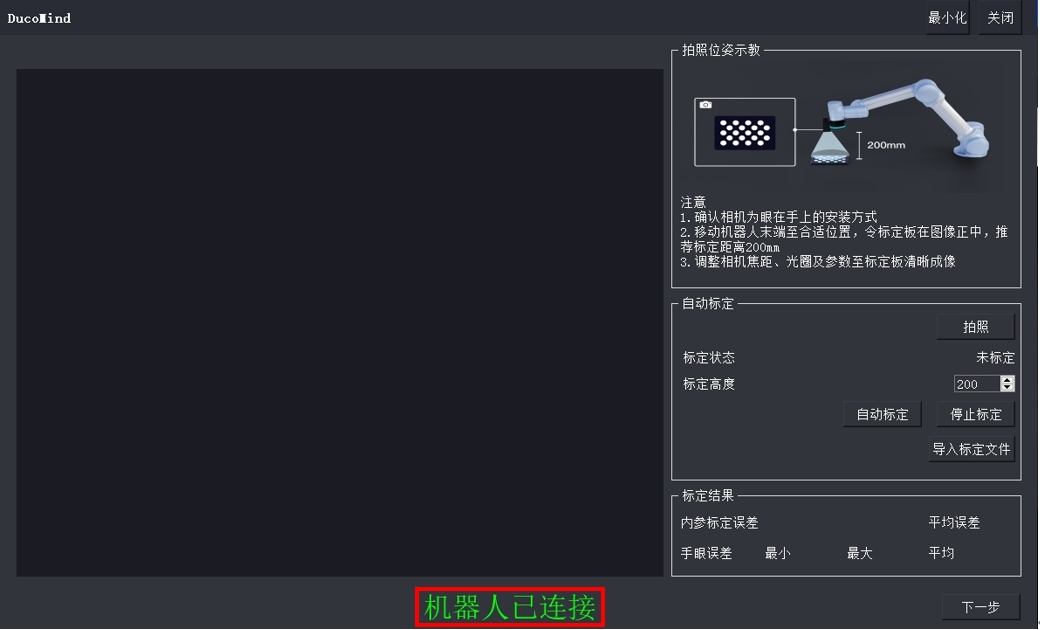
4.2. 点击拍照,来调整标定板在当前相机成像下的位置,即使标定板在图像中央即可。

4.3. 确认相机安装在机械臂末端,确定拍照高度,大致给出标定板距相机的距离即可,若标定过程中标定空间较大,可适量增大拍照高度,来缩小机器人标定时的运动空间。
4.4. 点击自动标定,进行标定即可。

注意
机器人分三层的高度运动,底层运动半径最小(大致半径范围为30-50mm),中层运动半径则增加30%,顶层运动半径则在中层的基础上再增加30%,在此过程,注意机器人的运动轨迹防止碰撞。
4.5. 标定状态:分别有内参标定中、手眼标定中、停止标定、标定失败、导入标定文件成功。
4.6. 若标定过程中,机器人发生碰撞,可点击停止标定,或按下急停按钮,来停止标定。同时相机会掉电,SCMVS软件会自动退出,需将机器人上电后再对相机方案进行配置。
4.7. 标定结束后,标定结果处可显示标定误差。使用时,主要观察手眼误差的平均值,若平均值大于0.5,在高精度定位要求下(如0.5mm)可重新进行标定。

4.8. 导入标定文件:在相机参数不进行调整的情况下,可使用同一个标定文件,只需重新设置注册点即可,重新设置注册点后,需保存配置。
注册配置
5.1. 点击下一步:即可进入注册界面。
5.2. 最小化:即最小化界面窗口。
5.3. 关闭:即关闭此标定窗口。
5.4. 注册状态:即识别码的状态,未识别,识别成功。
5.5. 基准注册:点击注册前需要将识别码放置相机视野中央。

5.6. 计算距离:即标记码距离相机的真实计算距离,若过远或者过近,只是与输入的标定板与相机距离做一个对比,给出一个距离的直观展示。
5.7. 保存配置:即保存标定文件和基准注册点位。

5.8. 完成:即完成标定和保存文件。
5.9. 导入已保存的配置文件:导入到固件,点击下一步到输出配置。

输出配置#
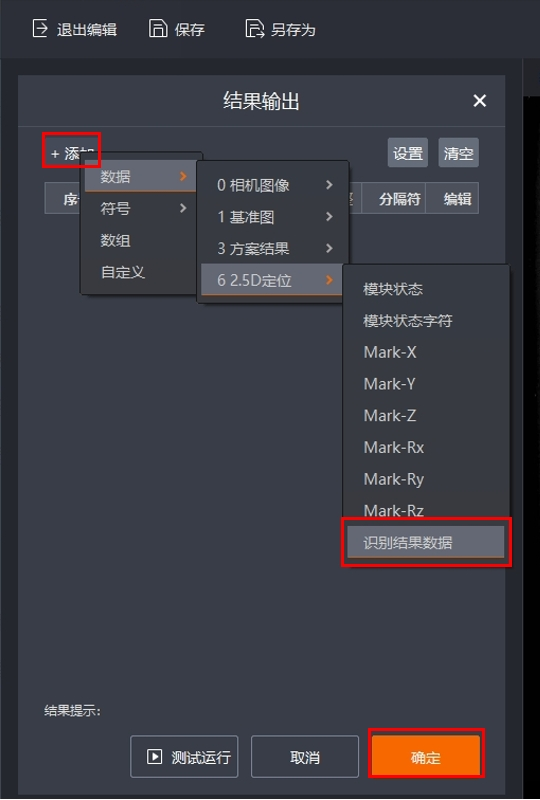
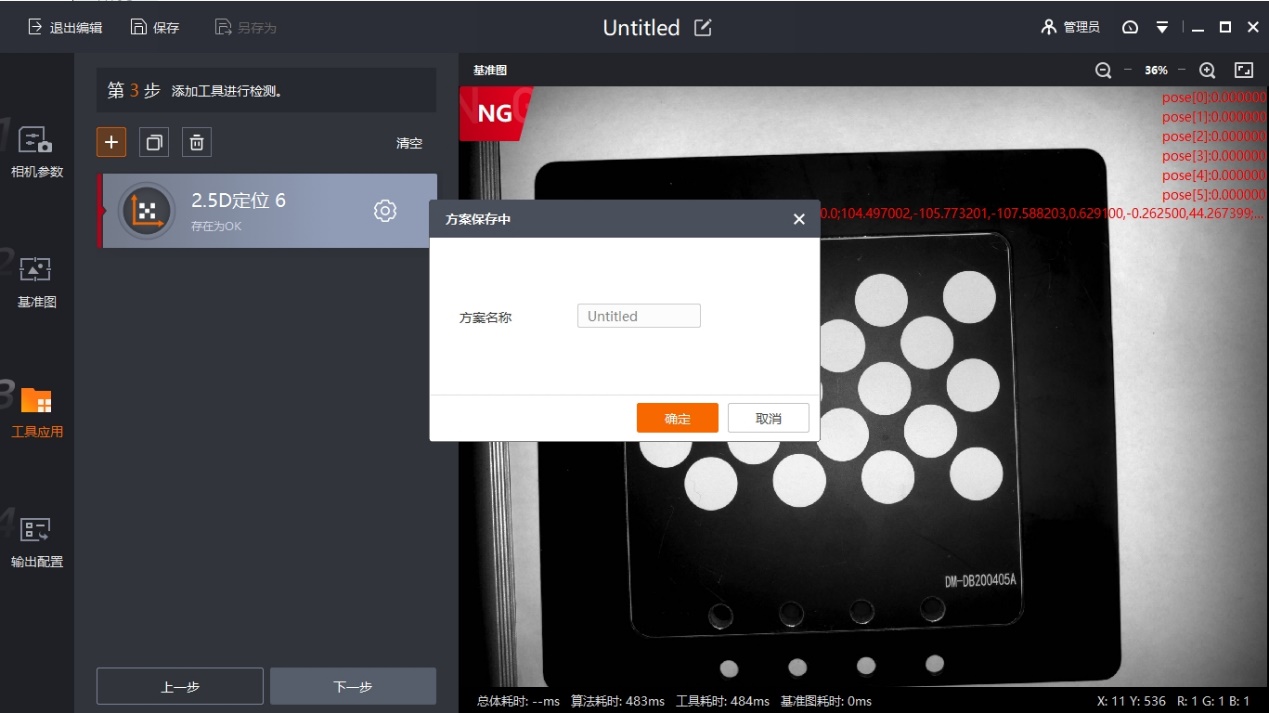
配置输出,结果输出,选择配置完成的2.5D算子结果输出后,点击确定,保存此配置方案,定义配置方案的名称。
方案切换配置#
在方案配置完成时,需要修改方案名字,不同方案不要设置同名,以防机器人2.5DDetectionSmart智能块切方案时,导致切换方案切换错误。
在SCMVS界面的方案管理界面,配置新建立的方案,选择方案配置切换,选择通信切换,点击确定即可。


设置方案为运行模式,如下图所示。
