插件配置#
确认机器人是否安装插件SmartCam,若安装成功,在系统测试中的插件管理界面,将SmartCam插件打开。

在使用SCMVS软件进行方案配置时,将智能相机插件的模式切换配置为配置模式,SCMVS软件完成配置方案后,将智能相机插件的模式切换配置为运行模式。

2.5DDetectionSmart智能块#
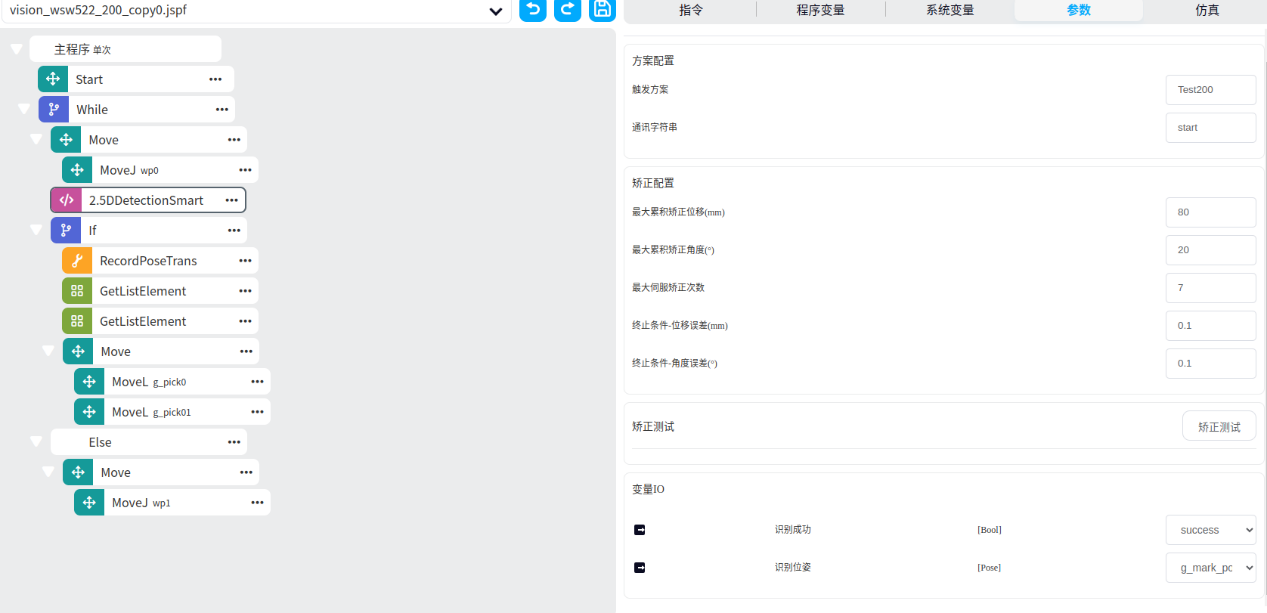
在指令界面找到2.5DDetectionSmart智能块,输入触发方案的名称和通讯字符串。方案的名称即为在SCMVS软件配置的方案名称,通讯字符串默认为start进行配置,其参数配置含义如下:
最大累积矫正位移:矫正过程中,机器人移动的距离累积和,如果机器人移动的累积距离大于最大累积矫正位移,那么矫正进程即终止,矫正结束,建议80。
最大累积矫正角度:矫正过程中,机器人移动的角度累积和,如果机器人移动的累积角度大于最大累积矫正角度,那么矫正进程即终止,矫正结束,建议20。
最大伺服矫正次数:矫正过程中,机器人移动的次数累积和,如果机器人移动的累积次数大于最大伺服矫正次数,那么矫正进程即终止,矫正结束,建议5。
终止条件-位移误差:矫正过程中,识别到的标记码位姿与基准位姿之间的位移偏差小于终止条件时,在同时满足角度误差的终止条件时,那么矫正进程即终止,矫正结束,建议0.25。
终止条件-角度误差:矫正过程中,识别到的标记码位姿与基准位姿之间的角度偏差小于终止条件时,在同时满足位移误差的终止条件时,那么矫正进程即终止,矫正结束,建议0.2。
矫正测试:可将机器人做一个偏移,验证设置参数是否合理,是否满足节拍。
变量IO:识别成功,即矫正成功。识别位姿,输出此时标记码在机器人基坐标系下的位姿。


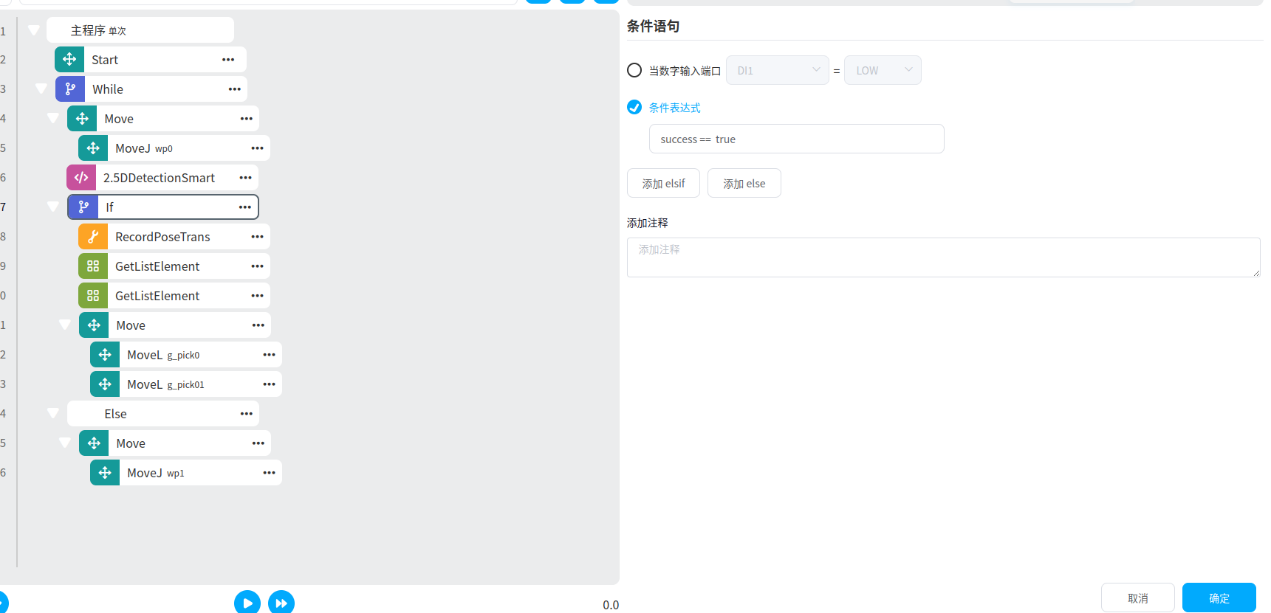
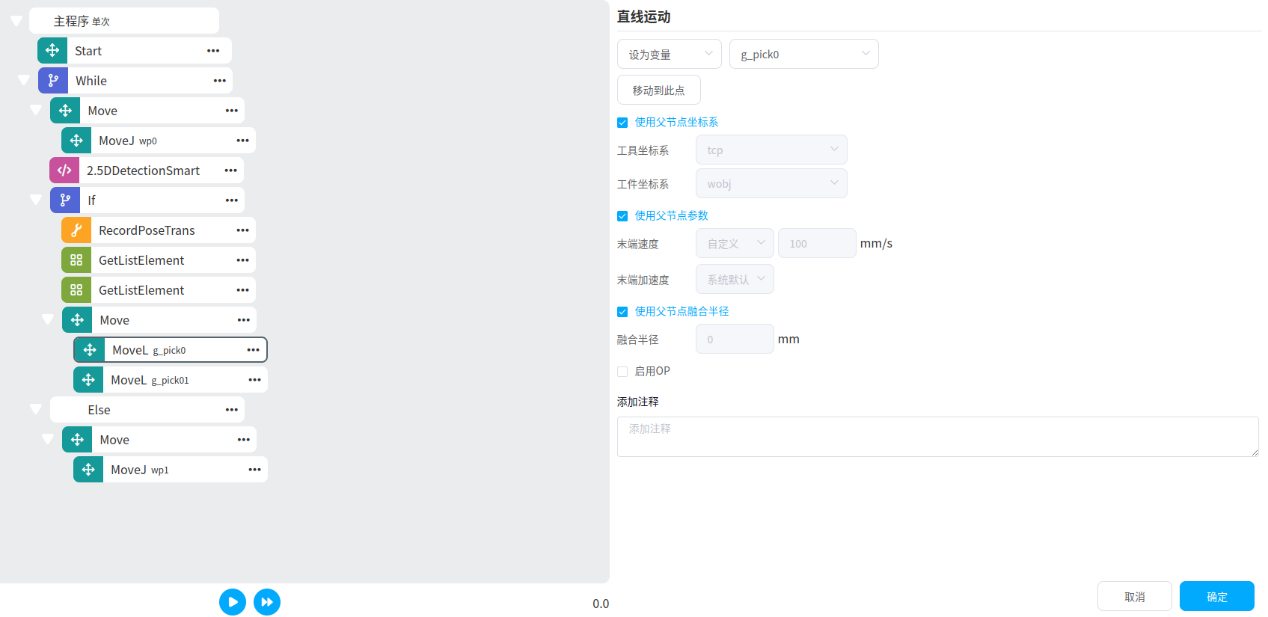
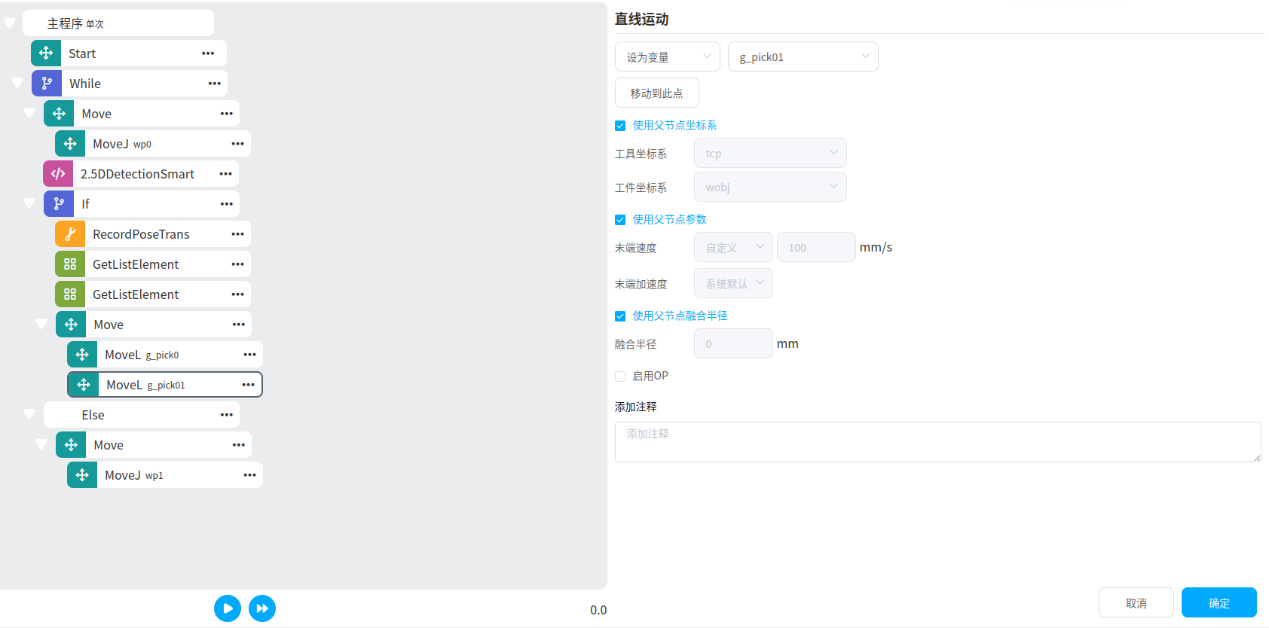
使用程序块简单流程说明,如下图所示。
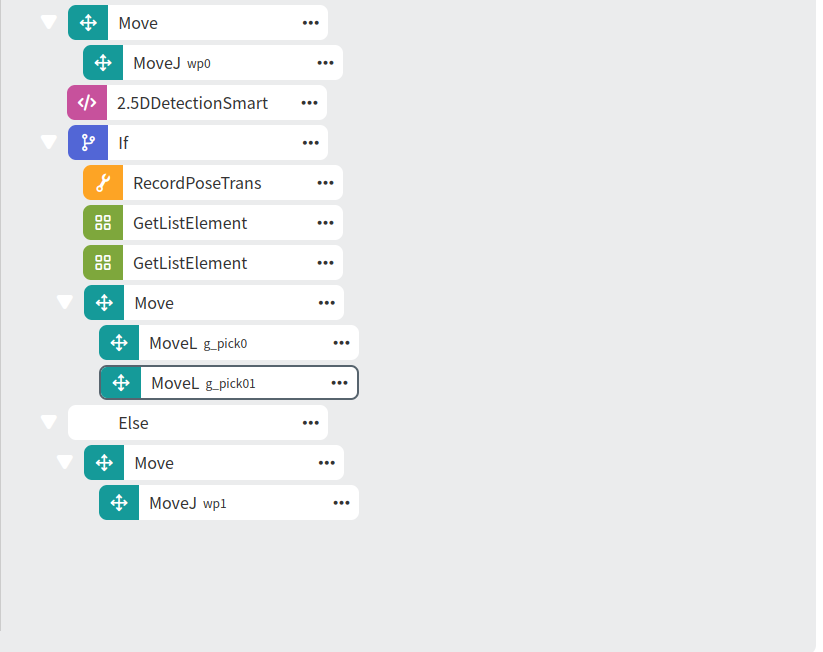
3. 程序块功能描述 | 2.5DDetectionSmart 流程块的配置,方案,通讯字符串,参数设置及输出设置可参考下图。