ROS环境安装#
安装ROS前准备#
4.34KB将软件与更新中的软件源改成国内的,比如清华

安装过程#
第一步:更新软件源
sudo apt-get update
第二步:安装Melodic版本ROS
sudo apt-get install ros-melodic-desktop-full
sudo apt-get install ros-melodic-rqt*
第三步:初始化rosdep
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
第四步:解决rosdep update time out
sudo rosdep init
rosdep update
第五步:安装ros install
sudo apt-get install python-rosinstall
环境配置#
第一步:加载ROS环境设置文件
source /opt/ros/melodic/setup.bash
第二步:创建并初始化工作目录
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
第三步:编译工作目录
cd ~/ catkin _ws/
catkin_make
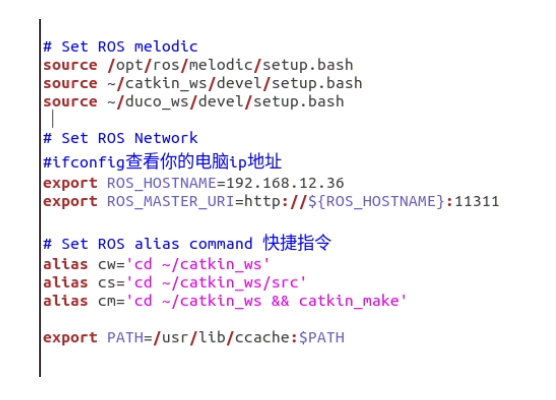
第四步:设置环境变量
sudo apt install net-tools
gedit ~/.bashrc
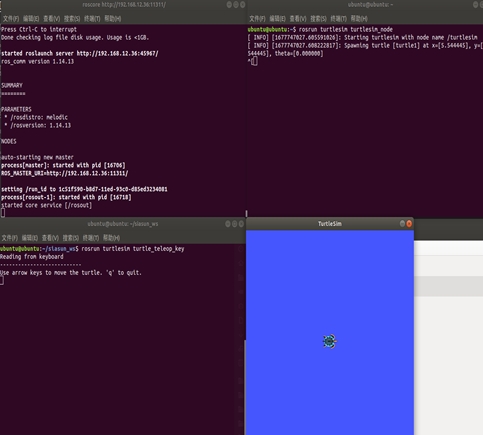
小海龟测试#
第一步:打开三个终端
第一个终端输入
roscore
第二个终端输入
rosrun turtlesim turtlesim_node
第三个终端输入
rosrun turtlesim turtle_teleop_key
第二步:
确认是否可以通过键盘上的上下左右键控制小海龟运动, 如果可以则完成ROS安装,否则出错。 如果出错重复上述安装过程。