ROS机器人开发包使用说明#
系统要求#
系统软件:Ubuntu 18.04.1
ROS版本:Melodic
机器人控制器程序 V2.7及以上版本
下载安装包并解压#
第一步:加载ROS环境设置文件
打开终端输入
•source /opt/ros/melodic/setup.bash
第二步:创建并初始化工作目录
mkdir -p ~/duco_ws/src
cd ~/duco_ws/src
catkin_init_workspace
第三步:编译工作目录
cd ~/duco_ws/
catkin_make
第四步:下载ROS二次开发包,并解压后
将所得的源码复制到指定的/duco_ws/src下。
具体代码目录结构:
- duco_ws
--src
--CMakeLists.txt
--duco_controller
--duco_demo
--duco_driver
--duco_gcr5_moveit_config
--duco_gcr5_moveit_config
--duco_gcr5_moveit_config
--duco_gcr5_moveit_config
--duco_gcr5_moveit_config
--duco_gcr5_moveit_config
--duco_msgs
--duco_support
第五步:编译ROS二次开发包
打开终端依次输入下列指令
cd ~/duco_ws
source ./devel/setup.bash
catkin_make
第六步:启动脚本控制机器人
确认当前DucoCore控制器是否已经启动
打开终端输入下列指令:
cd ~/duco_ws
source ./devel/setup.bash
roslaunch duco_gcr5_moveit_config moveit_planning_execution.launch robot_ip:=<控制器IP>
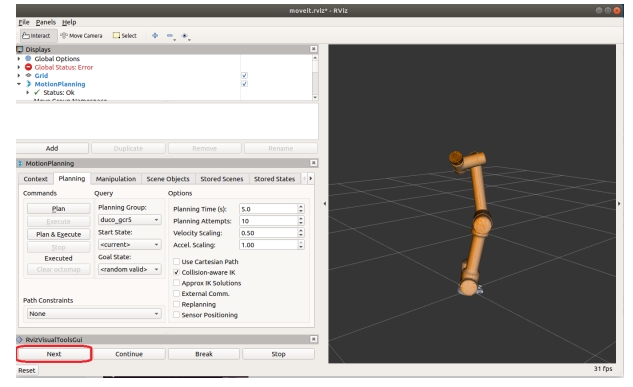
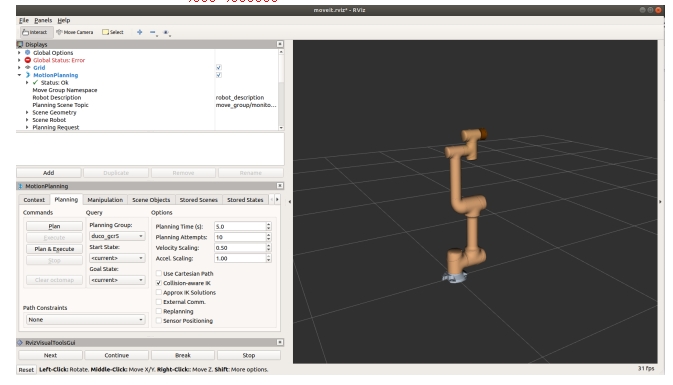
等待一会即可启动rviz+moveit界面,如下图所示。
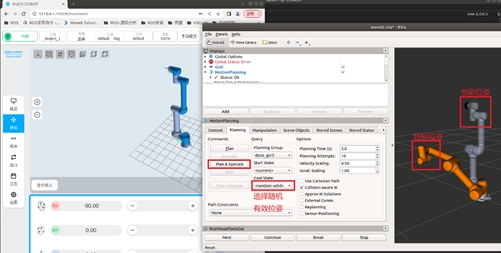
可通过设置Goal State为随机有效位姿,并确认该位姿处于安全状
态下,点击Plan & Execute按钮。
即可规划路径,并控制机械臂进行相应的运动。
duco_demo使用#
duco_demo里面包含gcr5_demo节点,该节点主要是通过MoveGroup提供的接口实现对机器人控制。对于有一定C++编程基础且对机器人比较熟悉的用户可以修改该示例程序从而实现自己想要的功能。
第一步:打开终端输入
rosrun duco_demo gcr5_demo
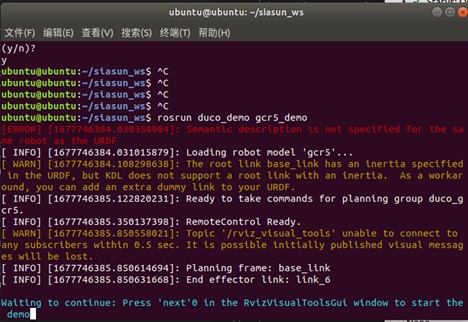
第二步:点击RVIZ窗口里的next 实现对机器人控制。