功能包编译与基础配置#
克隆DUCO资源包#
克隆DUCO的src资源包到本地,接下来cd到目标目录下,其中主要文件包括duco_msg,duco_arm,duco_support和duco_ros_driver等多可机器人功能包。
我们有两种方式对机械臂进行配置,第二种在下一章节。现在我们介绍下第一种配置方式。
编译duco功能包#
首先,需要进入到duco_ros2_driver目录,在此目录下运行如下命令:
第一步:分步编译核心包(msg/support/arms/driver)
1colcon build --packages-select duco_msg 2colcon build --packages-select duco_support 3colcon build --packages-select duco_arms 4colcon build --packages-select duco_ros_driver 5colcon build



第二步:资源加载
1source install/setup.bash 2colcon build
第三步:修改接口地址
进入src文件夹/使用的gcr文件夹/launch文件夹/demo.launch.py
找到:
修改其中的default_value为使用的域名地址。
第四步:启动所需moveit配置包的launch文件:
这里以duco_gcr5_910_moveit_config为例。
可更换为其他文件,例如duco_gcr3_618_moveit_config。
1source install/setup.bash 2ros2 launch duco_gcr5_910_moveit_config demo.launch.py
检查链接状况#
第五步:检查连接
首先新开一个位于同目录下的终端,初始化并查看节点:
1source install/setup.bash 2ros2 service list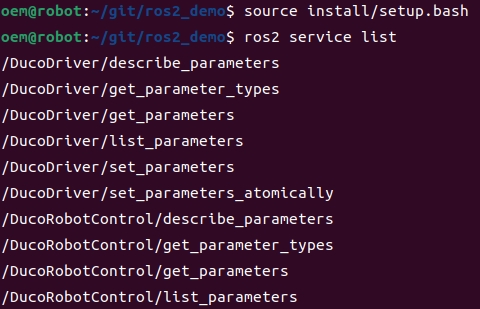
- 第六步:
检查是否存在以下节点: