配置机器人连接#
通过“Moveit_setup_assistant环境配置”步骤生成的配置文件为仅为机器人仿真测试,为与真实机械臂进行通信连接,可通过以下步骤实现。
当前提供的开发包duco_ros2_driver中,在duco_support文件夹下中已包含当前所有臂型urdf,并提供相应moveit_config配置文件,型号包含:
--duco_gcr3_618_moveit_config
--duco_gcr5_910_moveit_config
--duco_gcr7_910_moveit_config
--duco_gcr10_1300_moveit_config
--duco_gcr10_2000_moveit_config
--duco_gcr12_1300_moveit_config
--duco_gcr14_1400_moveit_config
--duco_gcr16_960_moveit_config
--duco_gcr16_2000_moveit_config
--duco_gcr20_1100_moveit_config
--duco_gcr20_1400_moveit_config
--duco_gcr25_1800_moveit_config
--duco_gcr30_1100_moveit_config
--double_arm_moveit_config
同时开发包中已包含与机器人数据接口和通信接口文件:
--robot_control
--duco_ros_driver
--duco_msg
以GCR3-618型号机械臂真机连接为例:
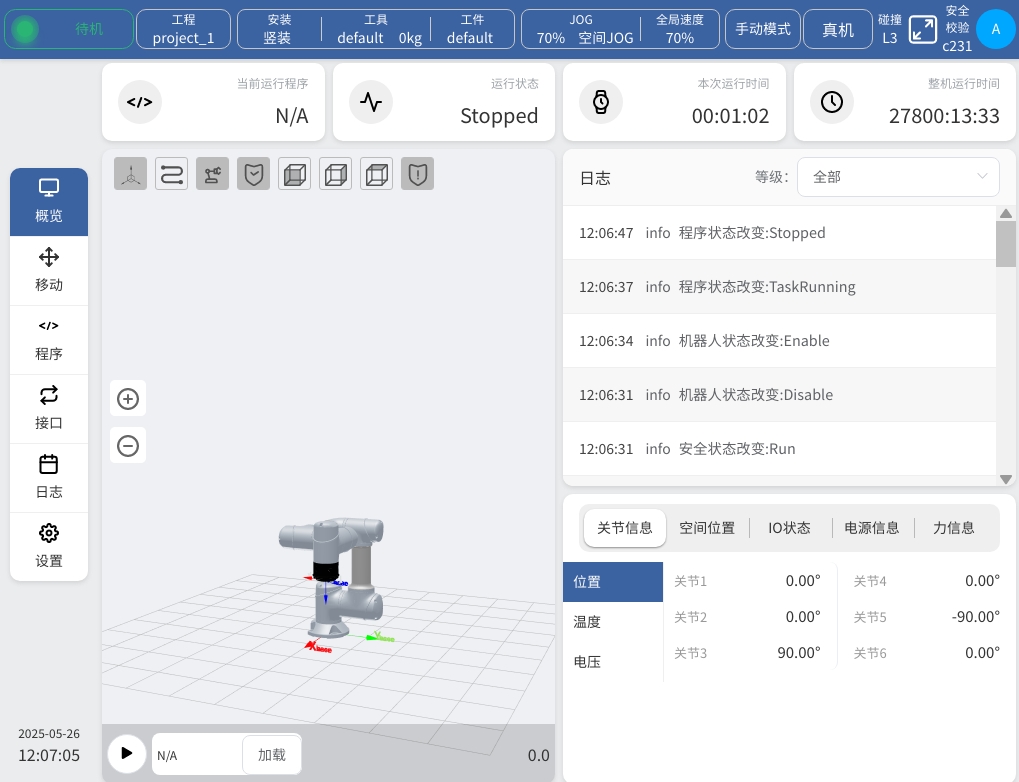
确认当前DucoCore控制器是否已经启动,并在“网络设置”界面查看当前控制柜IP
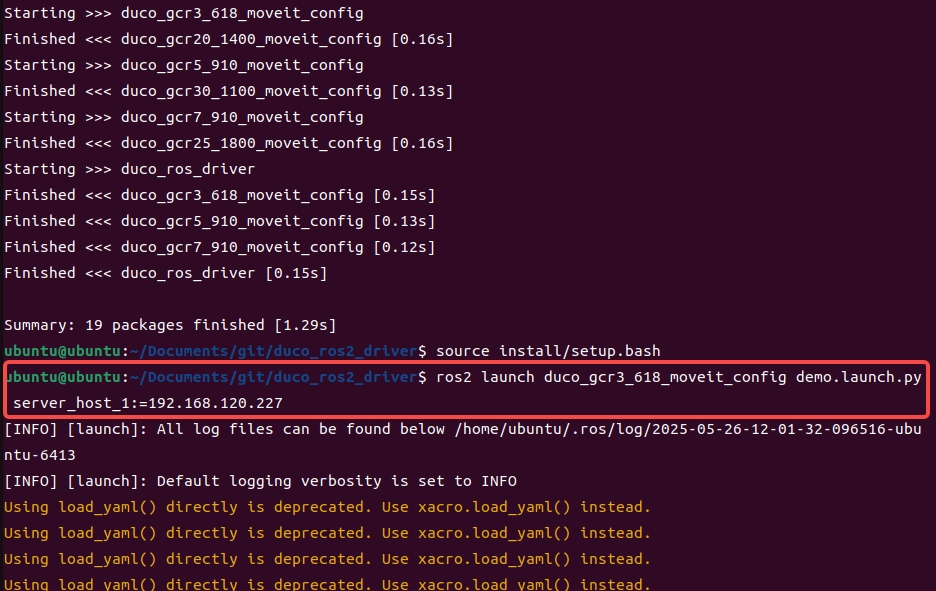
在duco_ros2_driver下完整编译功能包后进行source,运行该型号的demo.launch.py文件,并输入对应控制柜IP:
colcon build
source install/setup.bash
ros2 launch duco_gcr3_618_moveit_config demo.launch.py server_host_1:=<控制器IP>
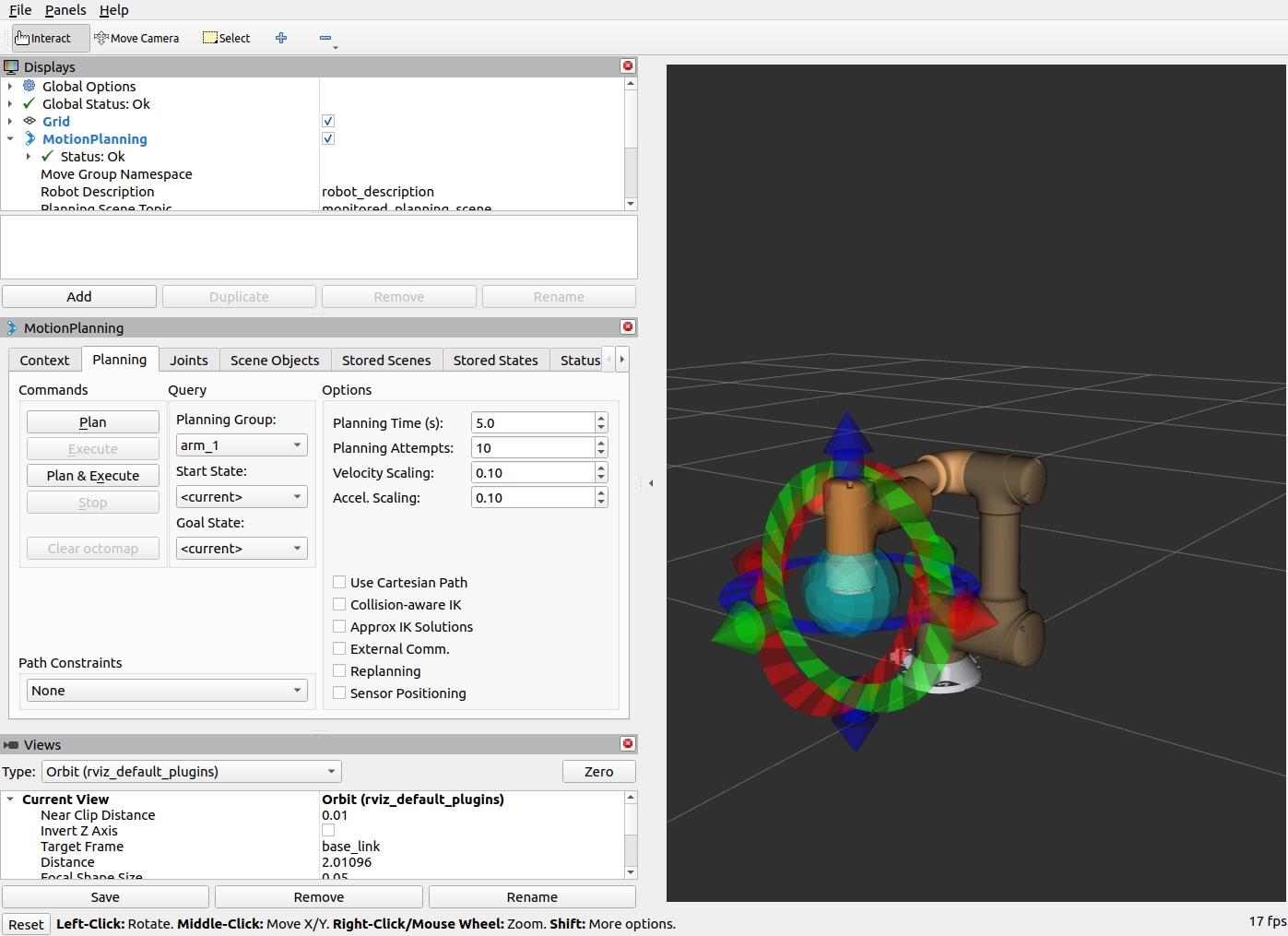
确认打开的RViz仿真界面机械臂状态与当前实际状态一致