


moveit示例运行及操作#
控制机械臂方案#
若需要控制械臂的运动,我们有两种方法。
第一种,通过Rviz软件控制。
第二种,通过指令在终端进行控制。
首先我们来介绍第一种方案,使用RVIZ控制机械臂,第二种方案将在下一章节讲述:
方案一:在Rviz软件中对机械臂进行控制#
进入Rviz程序后,我们可以看到机械臂的模型及其末端的小球。
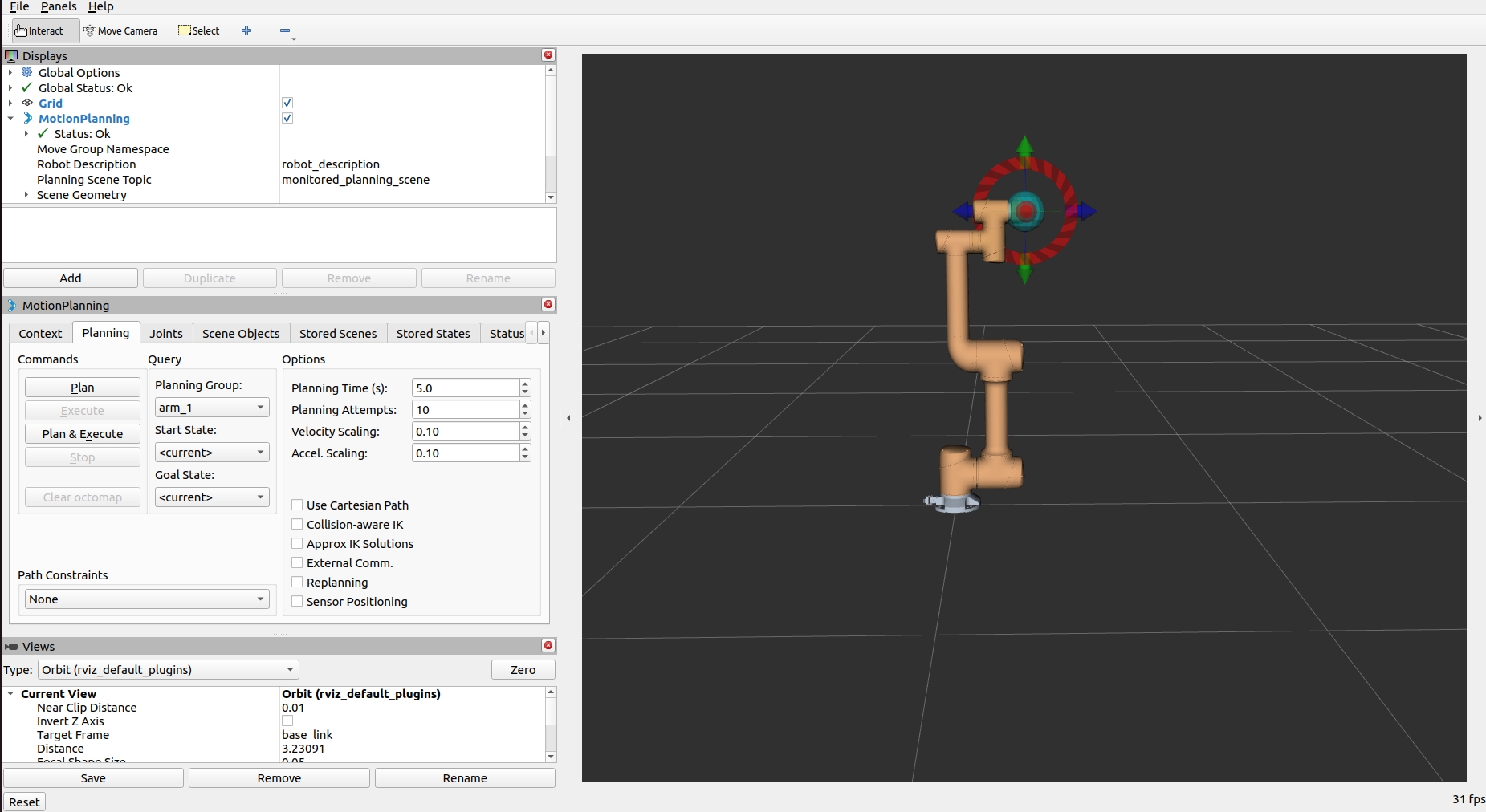
控制视角介绍:
鼠标滚轮控制视角远近。
鼠标左键可以拖拽小球,及进行视角的旋转。
鼠标右键控制我们视角旋转的中心点。
此时,我们有两种方法控制机械臂。
第一种:
直接拖拽小球至我们所需位置。
RIVIZ中的机械臂建模会自动模拟机械臂末端处于小球位置时,各关节角度和模拟机械臂位姿。
第二种:
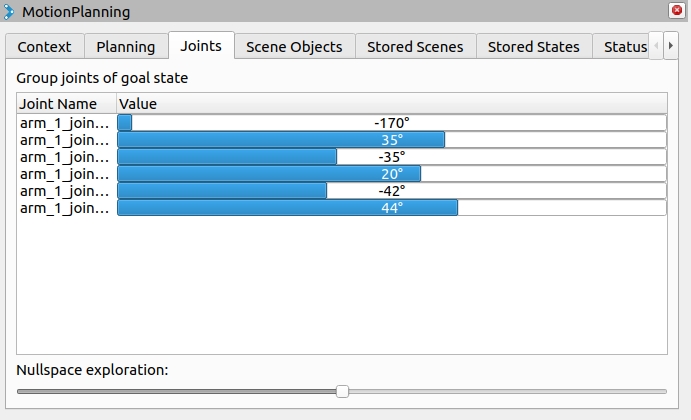
进入左侧的MtionPlanning中进入Joints界面。在此界面中可以单独控制每个机械臂关节的角度。
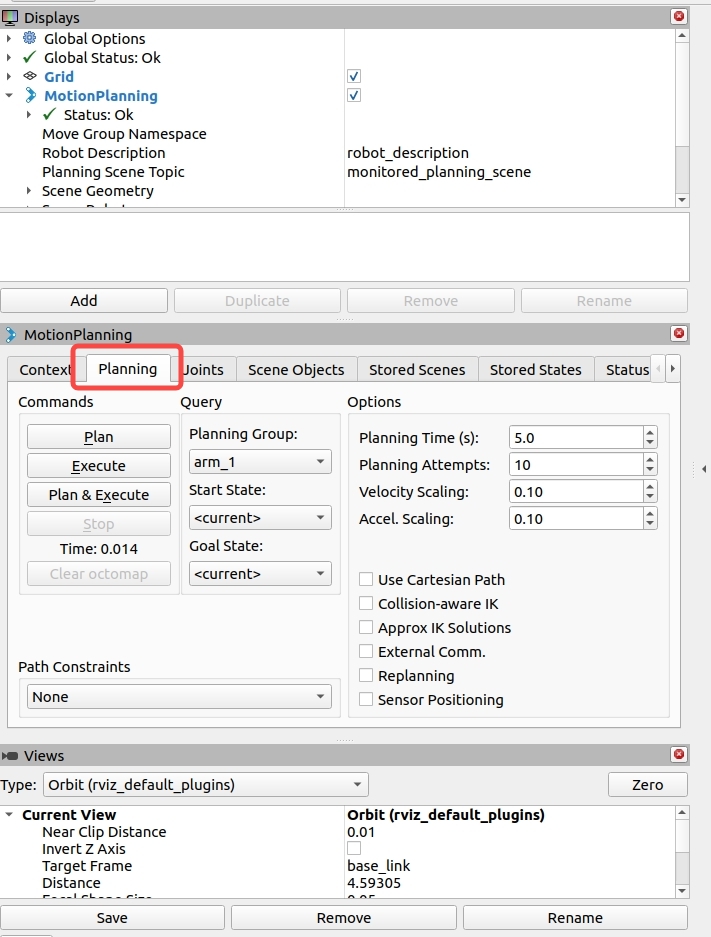
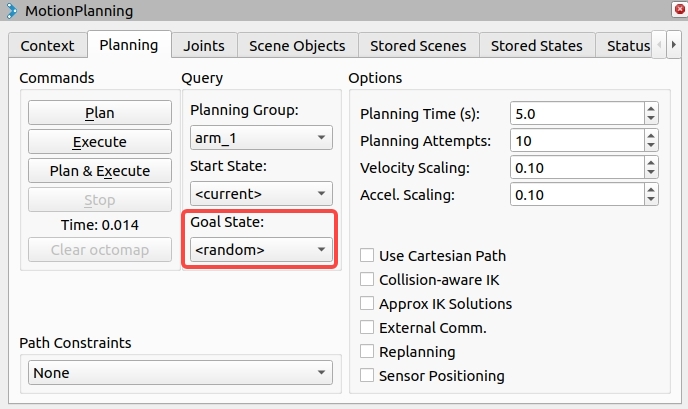
当调节好机械臂位置后,进入左侧的MtionPlanning中进入Planning界面。
点击plan & Execute。
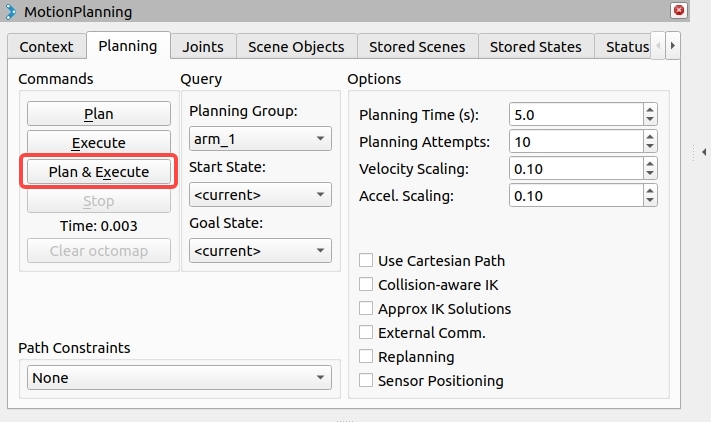
plan会自动计算好机械臂的运行轨迹。
然后Execute会将实际的机械臂通过计算好的路径,按照设定的速度,加速度等参数,最终运行至我们在RVIZ中设置的机械臂位置和位姿。
(可以在浏览器中打开使用的域名地址观测实际机械臂位姿,接口,日志等信息)
也可以单独使用plan功能查看规划路径,此时机械臂会模拟运动。然后单独使用Execute功能,让实际机械臂运动至规定位置。
若希望采用随机位姿,也可通过改变Goal State的参数为random,机械臂将随机选取一个位姿。
如果希望有更多功能,比如TF等,如何增加呢?
在RVIZ的左侧界面中,有一个Displays界面。
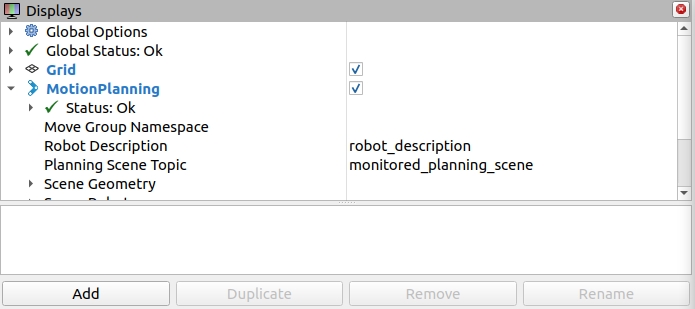
点击界面左下角的Add按钮。
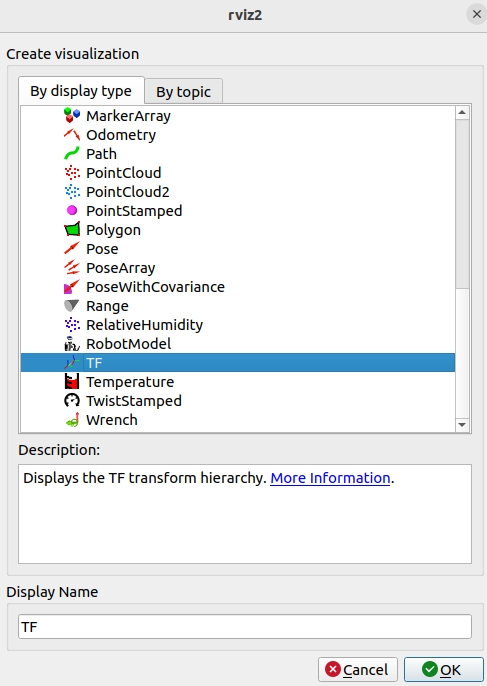
选中我们所需功能后,点击OK按钮即可使用。
(在下一章节将介绍如何通过指令来控制机械臂)