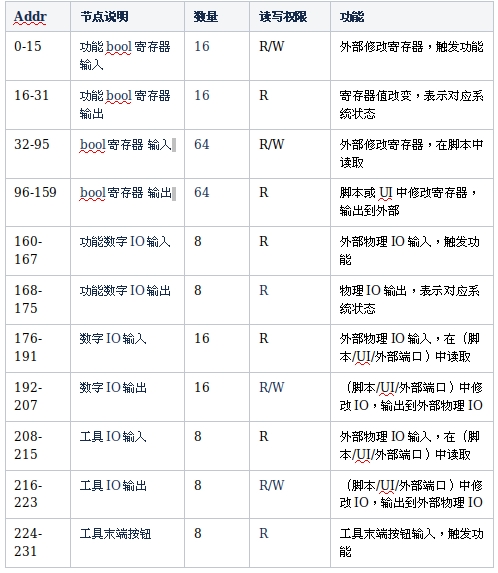
本章描述机器人端作为Modbus/TCP server 端口时的可交互数据。 线圈(Colis):读(功能码:1)写(功能码:5单个/15多个)
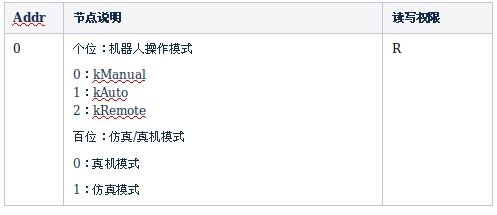
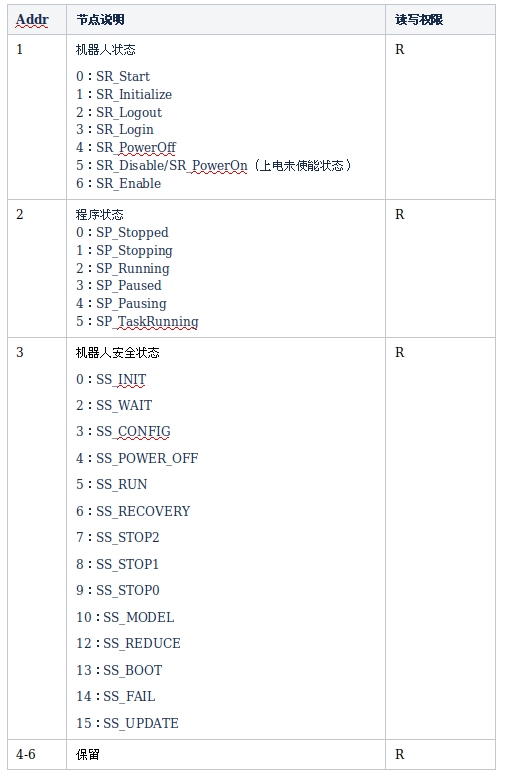
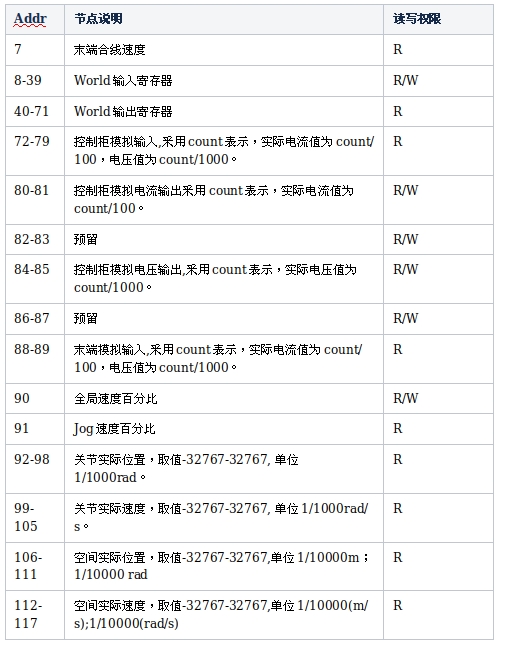
Holding Registers:读(功能码:3)写(功能码:6单个/16多个)