Ethernet及IP接口配置#
接口说明#
关于硬件接口说明,请参照DUCO CORE 硬件手册。
传输类型: 专有所有者(Exclusive Owner), 可同时设定从扫描器到机器人的数据发送和从机器人到扫描器的数据接收.
触发类型: 循环(Cycle), 定期触发数据传输.
模式: 点对点(Point-to-Point), 扫描器以一对一方式接收目标设备的数据.
输入路径地址(Input Assembly): 100 (0x64).
输出路径地址(Output Assembly): 150 (0x96).
默认输入字节大小(O->T size): 276, 范围是[0, 1024].
默认输出字节大小(T->O size): 476, 范围是[0, 1024].
通讯传输间隔周期(RPI): 默认20ms, 范围是[5ms, 1000ms].
脚本函数#
机器人提供了相应的脚本函数,可读取或者写入数据接口的值。
write_reg(number:num, number:type, val)
函数说明:
该函数可修改内部寄存器的值。
参数说明:
num: 内部寄存器序号。
type: 修改的寄存器类型1为bool寄存器,2为word寄存器,3为float寄存器。
val: 根据type类型确定val类型。
当type为1时,val类型为boolean,true表示真,false表示假,num范围为1-64
当type为2时,val类型为number,范围0-65535,num范围为1-32
当type为3时,val类型为number,num范围为1-32
参数错误时函数不改变内部寄存器数值。
返回值:
无
示例:
write_reg( 5, 1, true)
read_reg (number:num, number:type, number:in_out)
函数说明:
该函数可读取内部寄存器的值。
参数说明:
num: 内部bool寄存器序号。
type: 寄存器类型1为bool寄存器,2为word寄存器,3为float寄存器。
当type为1时,num范围为1-64。
当type为2时,num范围为1-32。
当type为3时,num范围为1-32。
参数错误时函数不改变内部寄存器数值。
in_out:为0时代表读取输入寄存器,1代表读取输出寄存器。
返回值:
当type为1时,返回值类型为boolean,true表示真,false表示假。
当type为2时,返回值类型为number,范围为0-65535。
当type为3时,返回值类型为number。
示例:
ret=read_reg(10, 1, 1)
配置流程#
机器人(从站)配置#
机器人控制器LAN1网口默认绑定Profinet通信, 点击机器人界面的"接口"->"工业总线"->"Profinet", "端口设置"选择"不配置", 启用切换到"OFF":

点击"EtherNet/IP", "端口设置"选择"LAN1", 启用切换到"ON":
机器人EtherNet/IP通讯默认不使用配方, 输入输出数据结构参考5.2章节. 用户也可以在机器人界面设置自定义的数据大小和数据结构.
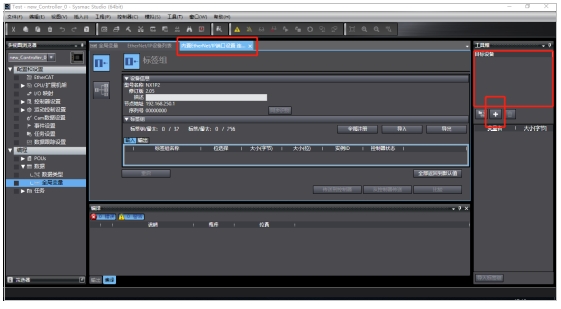
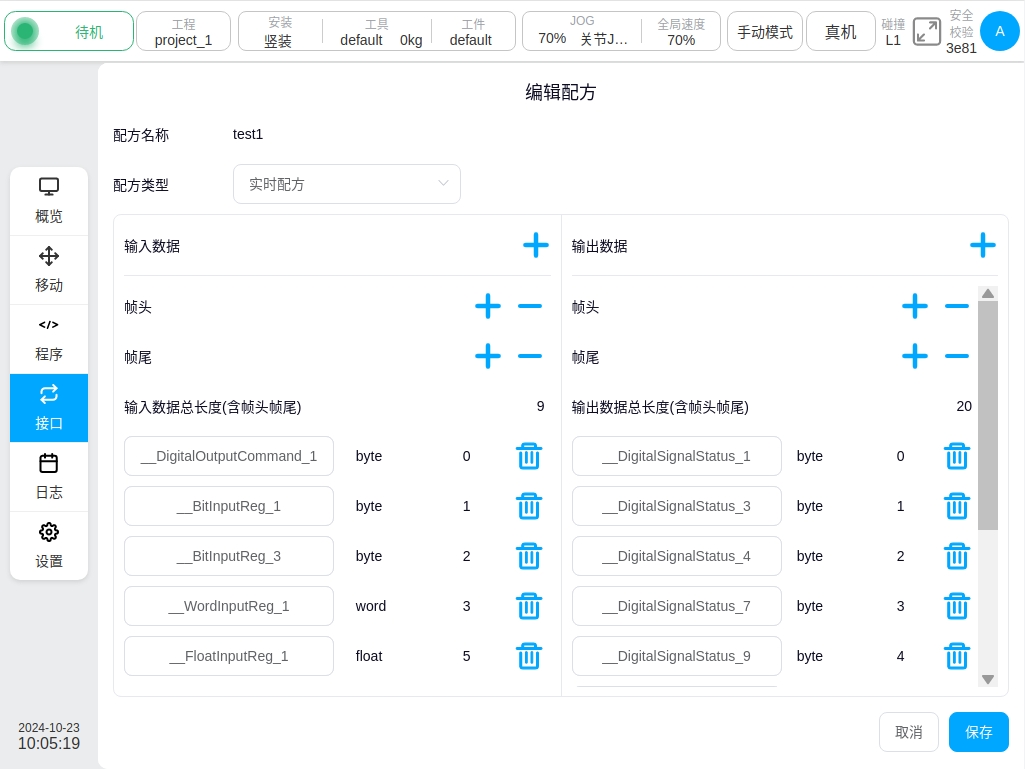
点击"配方管理", 点击 "+" 图标, 弹出配方配置窗口, 输入配方名称, 然后选择"实时配方". EtherNet/IP只能使用实时配方:
点击 "+" 图标, 添加输入和输出的数据项, 数据项的含义请参考第三章节. 例如添加9个字节的输入数据和20个字节的输出数据, 然后点击"保存"和"返回":
点击"配方"下拉框, 选择创建的实时配方, 保存工程, 然后重启生效:
扫描器(主站)配置#
下面以汇川Easy521型号PLC为例, 使用AutoShop软件简述Ethernet/IP通信的配置流程:
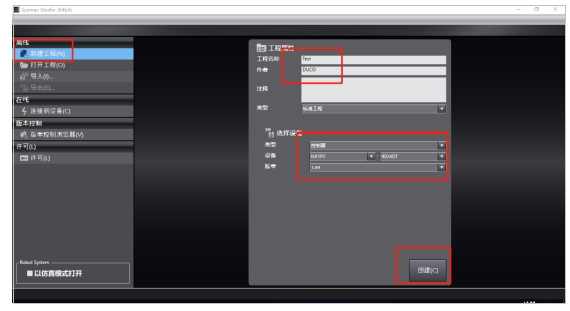
单击新建工程图标:
输入工程名称和路径,选择当前设备的系列和型号,然后点击“确定”:
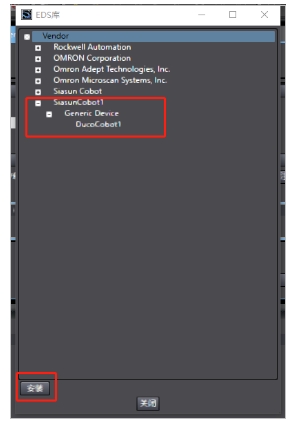
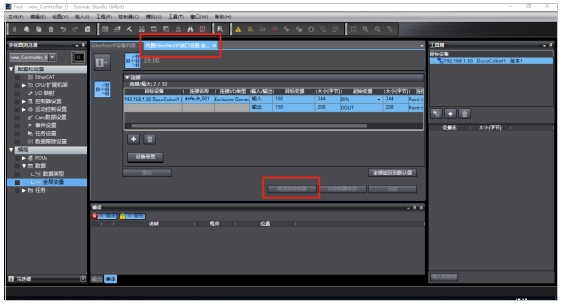
右键右侧工具箱里的“EtherNet/IP Devices”, 点击弹出的"导入EDS", 选择EDS文件, 并点击"确定", 在"Other Devices"列表中会显示"DucoCobot"选项:
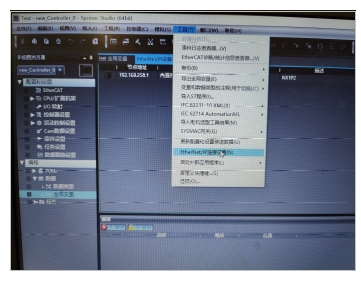
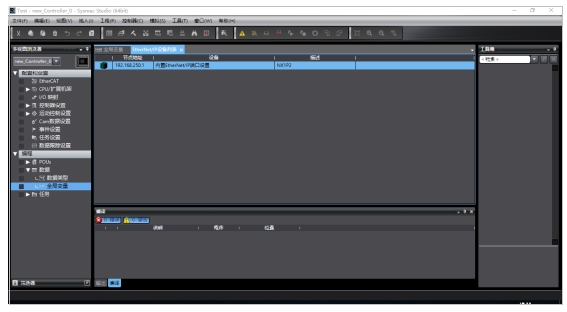
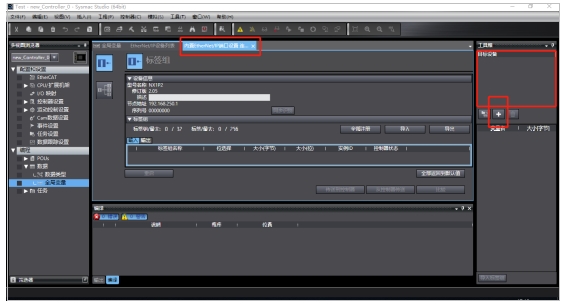
双击左侧的"工程管理"->"配置"->"EtherNet/IP", 界面显示EtherNet/IP的配置窗口, 然后双击右侧的"DucoCobot", 将机器人从站添加到网络组态:
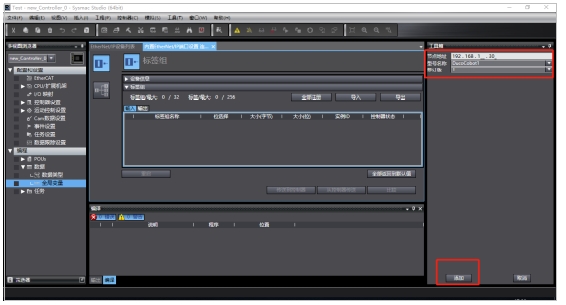
双击添加的EtherNet/IP从站"DucoCobot", 进入设置界面, 填写机器人的IP地址, "电子匹配"选择"兼容模块":
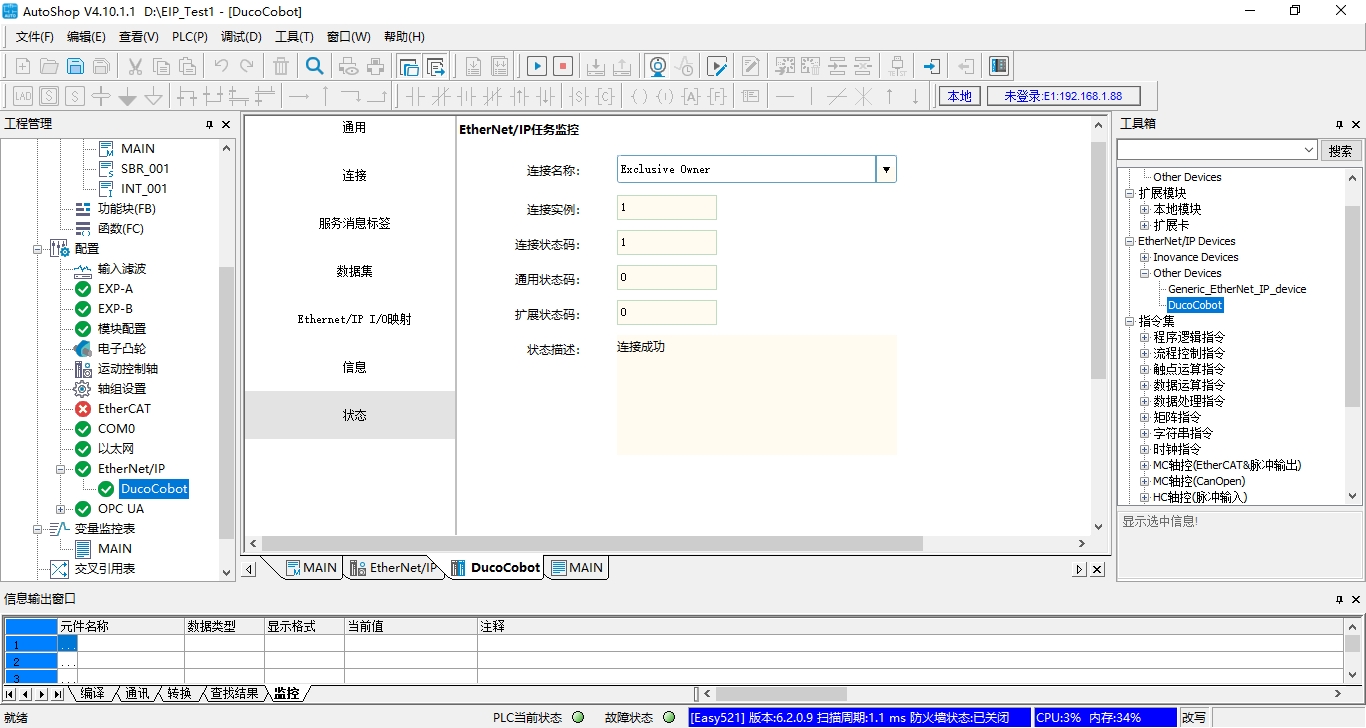
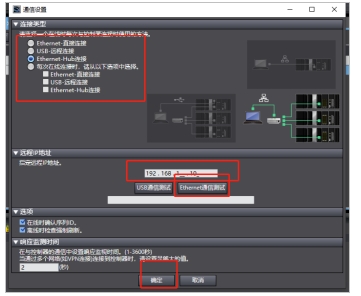
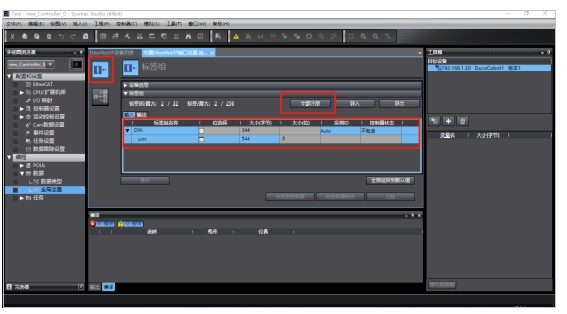
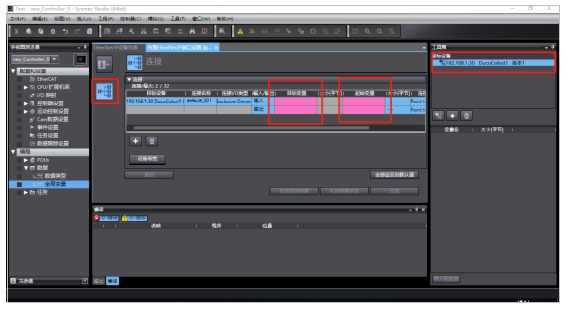
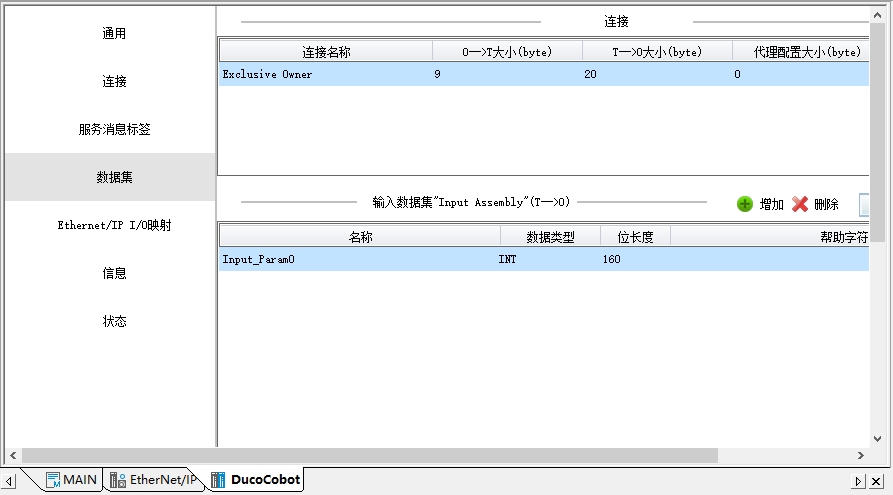
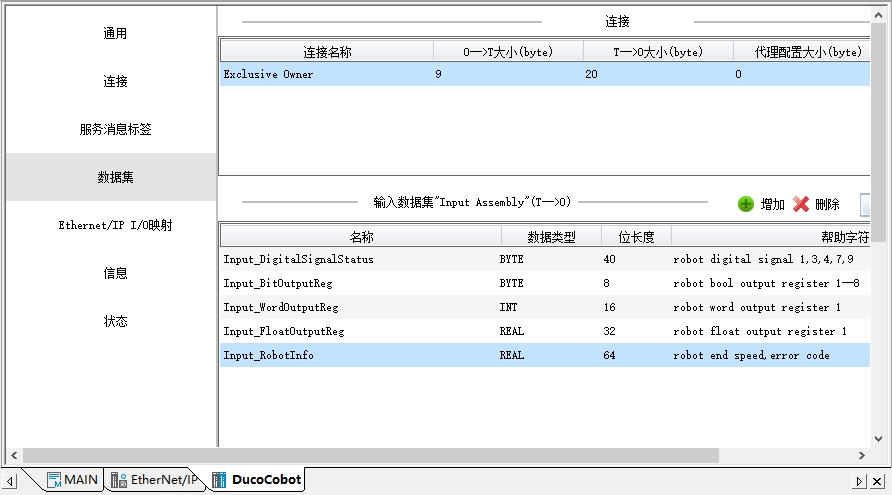
切换到"连接"窗口, 默认显示"专有所有者"(Exclusive Owner)类型连接. 从生产(扫描器)到消费(目标设备)传输的数据量(O->T size)默认是276字节,从消费(目标设备)到生产(扫描器)传输的数据量(O->T size)默认是476字节, 通讯传输间隔周期(RPI)默认是20ms, 范围是[5ms, 1000ms]:
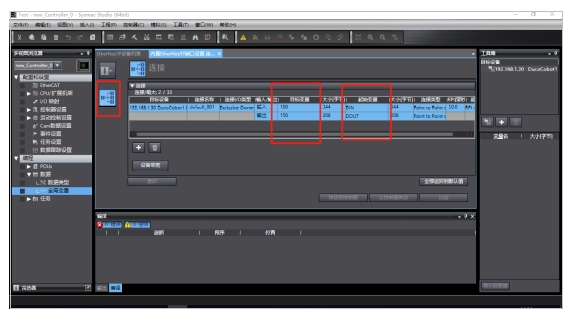
点击"编辑连接", 进入连接设置界面, 可更改输入, 输出和通讯间隔周期的大小. 输入输出的字节数量必须和机器人端的输入输出数量相同, 否则无法连接:
如果在机器人界面不使用配方, PLC端输入输出字节大小选择默认, 输入输出数据结构参考5.2章节.
如果自定义通讯数据结构, 需要在连接设置界面修改输入输出的字节大小.
例如输入字节大小为20, 输出字节大小为9, 点击"确定". 机器人界面配方设置成输出字节大小为20, 输入字节大小为9:
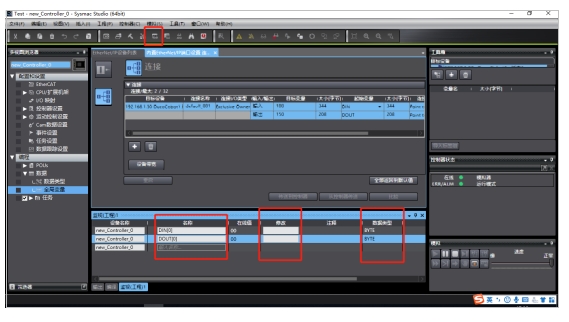
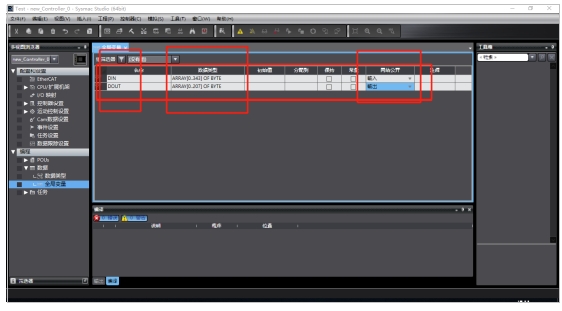
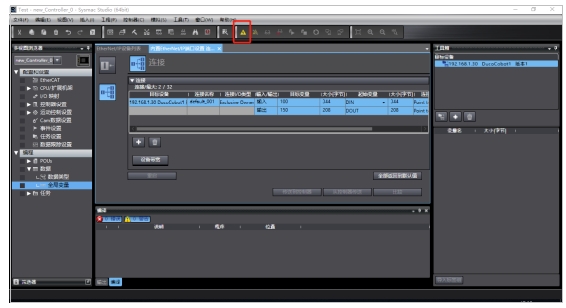
点击"数据集", 设置输入数据集和输出数据集:

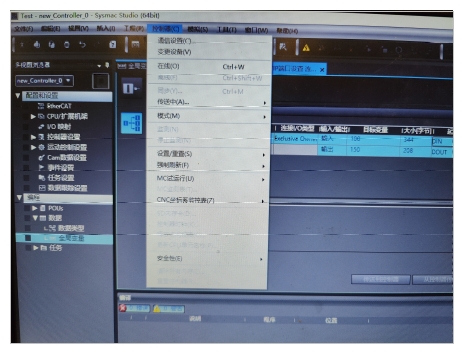
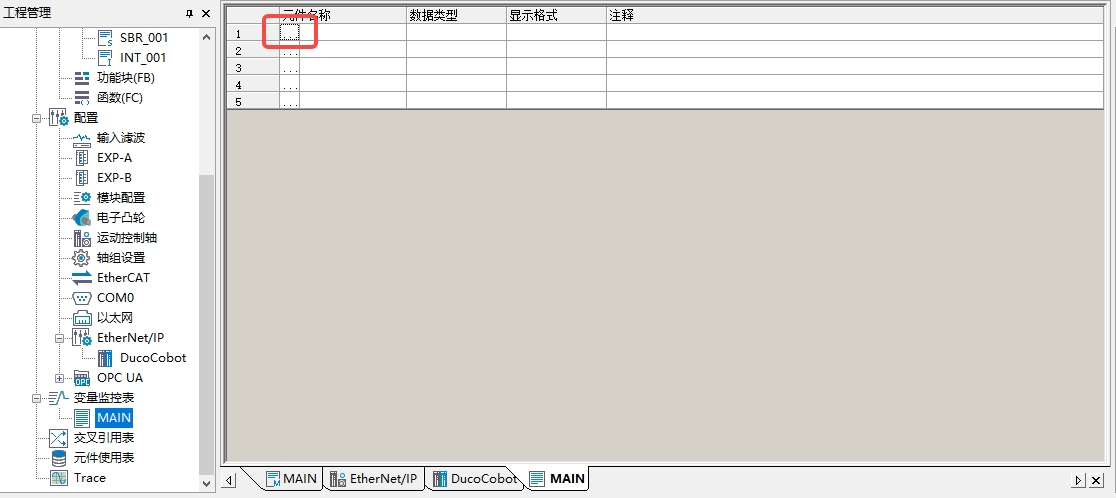
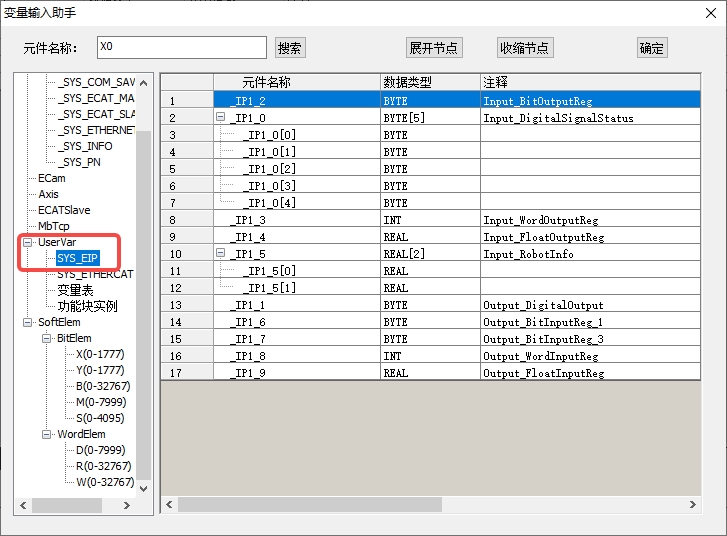
双击"工程管理"->"变量监控表"->"MAIN", 切换到数据监控窗口, 然后点击"...", 选择创建的数据集:
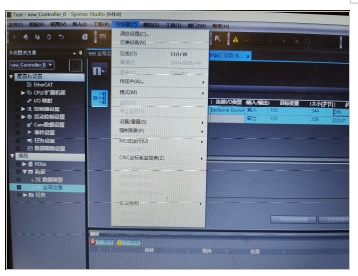
分别点击"下载", "运行", "监控". 成功连接PLC并监控输入输出数据: