Ethernet及IP接口配置#
接口说明#
关于硬件接口说明,请参照DUCO CORE 硬件手册。
Ethernet/IP 数据交互的周期为4ms。
脚本函数#
机器人提供了相应的脚本函数,可读取或者写入数据接口的值。
write_reg(number:num,number:type,val)
函数说明:
该函数可修改内部寄存器的值。
参数说明:
num: 内部寄存器序号。
type: 修改的寄存器类型1为bool寄存器,2为word寄存器,3为float寄存器。
val: 根据type类型确定val类型。
当type为1时,val类型为boolean,true表示真,false表示假,num范围为1-64
当type为2时,val类型为number,范围0-65535,num范围为1-32
当type为3时,val类型为number,num范围为1-32
参数错误时函数不改变内部寄存器数值。
返回值:
无
示例:
write_reg( 5, 1,true)
read_reg (number:num,number:type,number:in_out)
函数说明:
该函数可读取内部寄存器的值。
参数说明:
num: 内部bool寄存器序号。
type: 寄存器类型1为bool寄存器,2为word寄存器,3为float寄存器。
当type为1时,num范围为1-64。
当type为2时,num范围为1-32。
当type为3时,num范围为1-32。
参数错误时函数不改变内部寄存器数值。
in_out:为0时代表读取输入寄存器,1代表读取输出寄存器。
返回值:
当type为1时,返回值类型为boolean,true表示真,false表示假。
当type为2时,返回值类型为number,范围为0-65535。
当type为3时,返回值类型为number。
示例:
ret=read_reg(10,1,1)
配置流程#
下面以欧姆龙PLC为例,使用Sysmac Studio软件简述Ethernet/IP接口的配置流程:
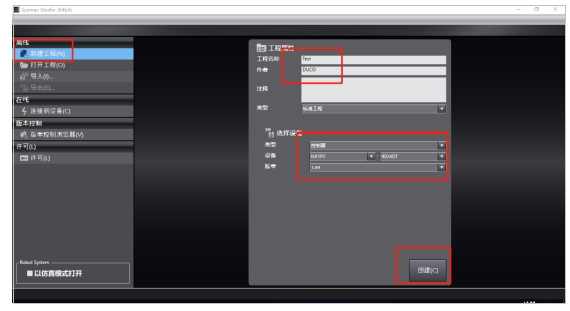
单击“新建工程”:

输入工程名称和作者,选择当前设备的型号,然后点击“创建”:
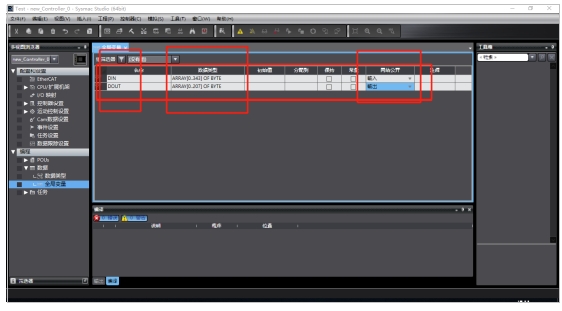
点击“编程”下拉框,点击“全局变量”;在“全局变量”页面里,鼠标右键,点击“新建”,创建用于接收和发送的变量(robot→PLC的字节大小是344,PLC→robot的字节大小是208),并选择变量网络公开类型:
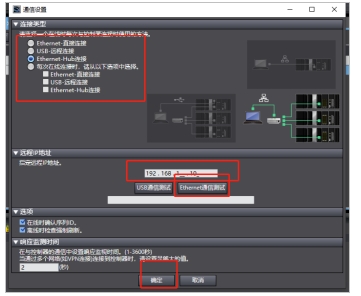
点击“控制器”、“通信设置”,在弹出的界面里选择连接类型,输入PLC的IP,并点击“Ethernet通信测试”,检查电脑和PLC的通信是否正常:
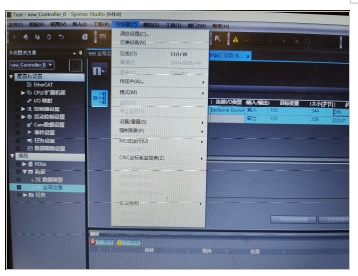
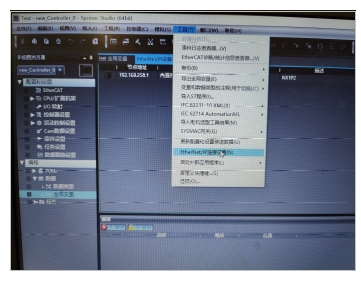
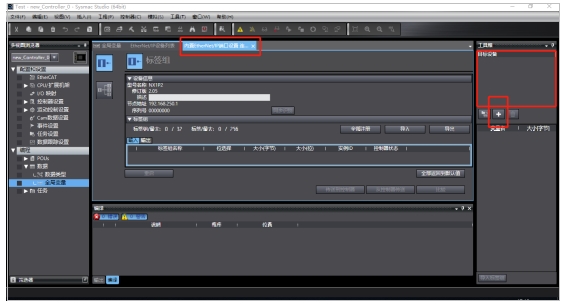
点击“工具”、“EtherNet/IP连接设置(N)”,加载“EtherNet/IP设备列表”窗口:
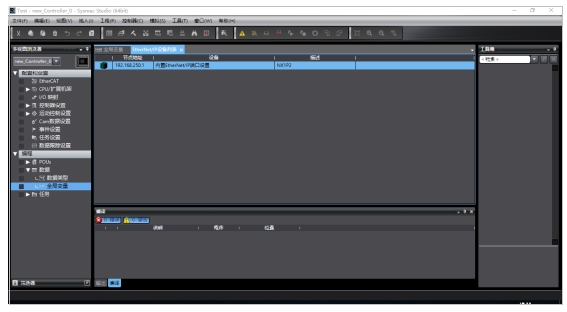
双击“EtherNet/IP设备列表”中条目,加载“内置EtherNet/IP端口设置 连接设置”窗口:
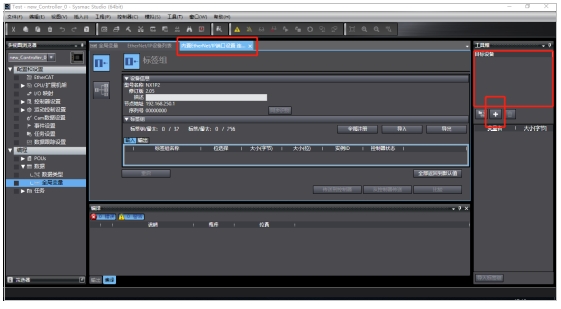
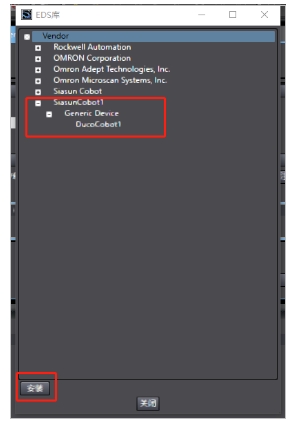
在软件右侧的“目标设备”窗口,鼠标右键,点击“显示EDS”,弹出“EDS库”列表,点击“安装”,选择DUCO COBOT的EDS文件:
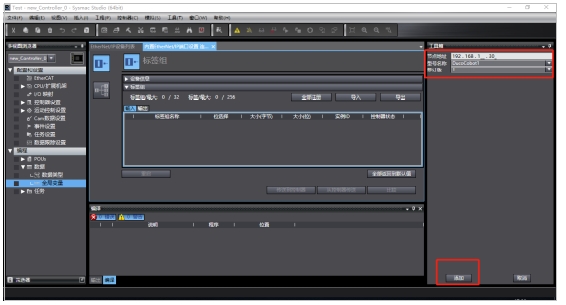
单击“目标设备”窗口下方的“+”按键,添加机器人的IP,选择DUCO COBOT的EDS,并选择修订版本,然后点击添加:
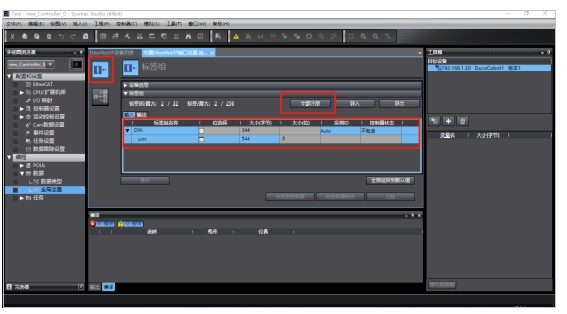
点击“标签组”窗口里的“全部注册”按键,注册创建的全局变量:
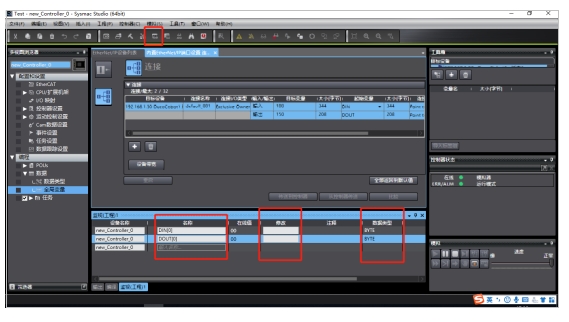
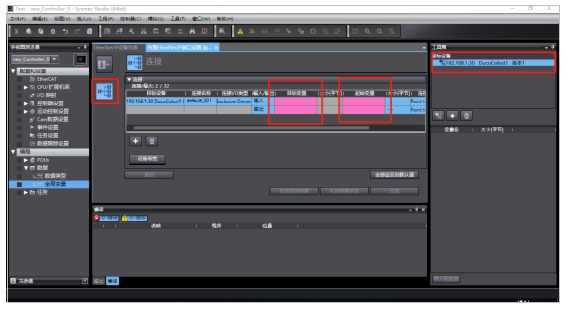
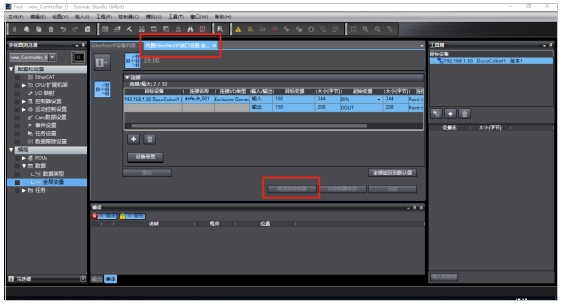
点击“连接”图标,然后双击创建的目标设备(或鼠标左键长按目标设备,并拖拽到“连接”窗口),将机器人的输入输出变量添加到“连接”窗口:
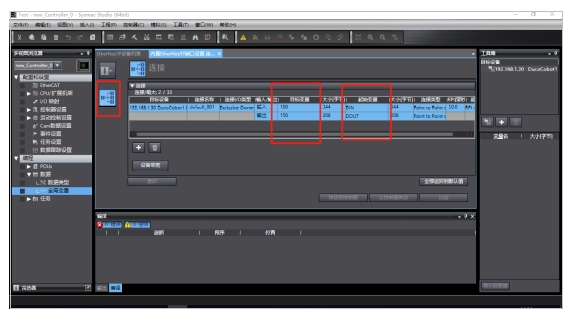
输入目标变量填写“100”,输入起始变量选择全局变量的输入“DIN”;输出目标变量填写“150”,输出起始变量选择全局变量的输出“DOUT”:
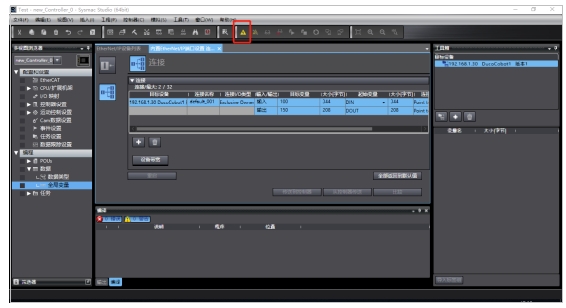
点击“在线”图标,连接PLC:
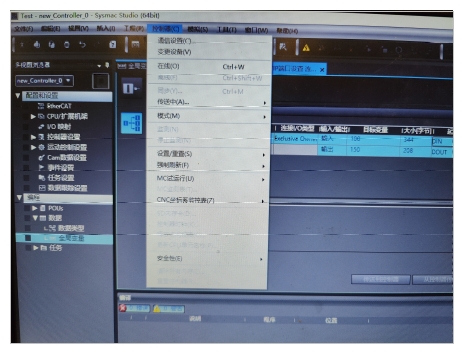
连接成功后,点击“控制器”、“同步”,在弹出的对话框里,勾选所有选项,并点击“传送到设备”,将EDS下载到PLC:
点击“内置EtherNet/IP端口设置 连接设置”窗口里的“传送到控制器”,在弹出的对话框里选择“编辑模式传送”:
点击“控制器”、“模式”,选择“运行模式”。然后,点击“监控”图标,加载“监视”窗口,添加输入、输出变量,监控(或设置)PLC接收和输出的数据(接收的数据不能修改):