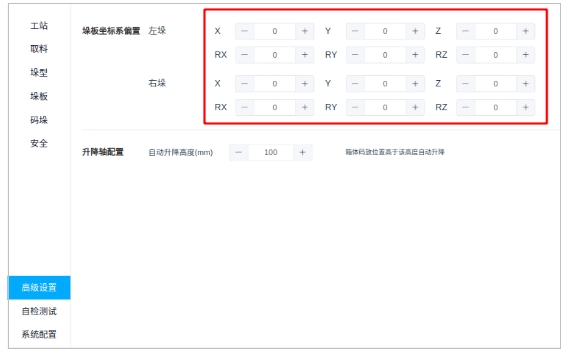
为了应对垛板所放地面不够平整时,可以通过设置垛板坐标系偏置来解决机器人末端放置箱体不够精确的问题。如下图所示
图 5.56 垛板坐标系配置图
注意事项:
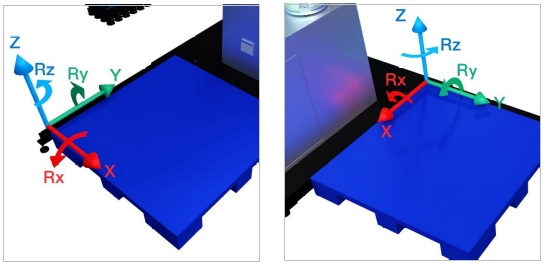
左、右垛板坐标系如下图所示
图 5.57 左、右垛板坐标系
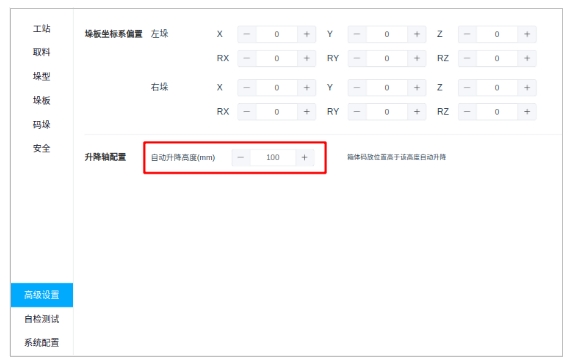
根据实际情况通过设置“自动升降高度(毫米)”,来使得箱体码放位置高于该高度时可以自动升降。如下图所示
图 5.58 升降轴配置图