产品介绍#
码垛工作站系统概览#
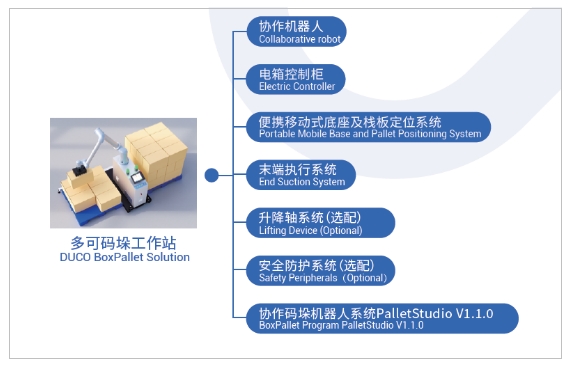
DUCO PalletStudio码垛工作站是为实现箱体堆垛应用而开发的软硬件集成方案,主要包括了多可的高负载协作机器人GCR25/GCR16,码垛底座及控制的软件包。相比传统的工业机械臂,协作机械臂组成的码垛工作站,占地更小,安全性更高,有电子安全护栏辅以协作机器人的碰撞检测,不需要额外围网进行防护,更灵巧。本手册帮助客户了解本码垛工作站,并提供如何设定与启用您的码垛配置。
其中,1.右线纸箱检测快插口,2.气源快插,3.电源航插,4.左线纸箱检测快插口。电源航插接线顺序为:1端子L → 2端子N → 4端子PE → 3端子不接,默认用左光电,把配件盒内的光电和此处4号口接插。
码垛工作站介绍#
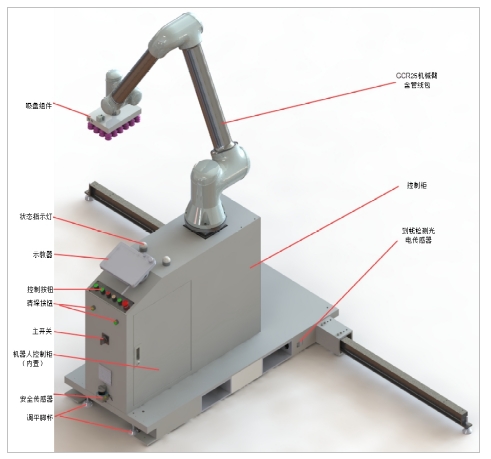
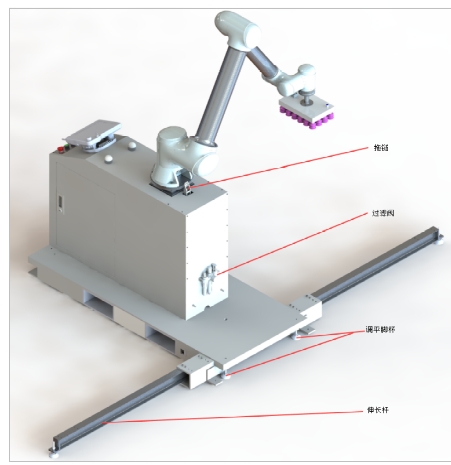
码垛工作站主要包括DUCO-GCR25/GCR16协作机器人,电箱控制柜(包括机器人控制器DC30D-J9),便携移动式底座及垛板定位系统,码垛控制系统等几部分。通过我们的控制柜可以对整体码垛工作站的进行完全控制。
1 DUCO-GCR25协作机器人
协作机器人系统主要由以下部分组成:
机器人本体
机器人控制柜
连接线缆
软件
其他选配件,附件
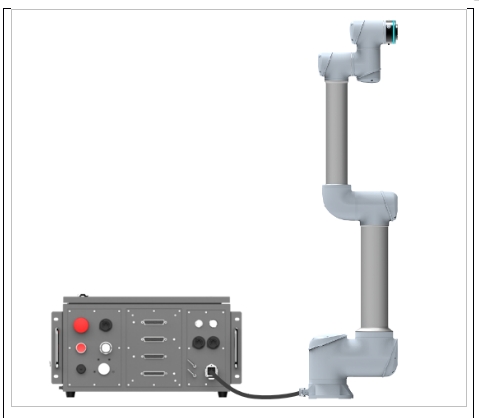
系统主要参数 |
|
|---|---|
自由度: 6 |
负载(TCP):25kg |
工作空间:1800mm |
重复定位精度:±0.05mm |
工作温度:-10℃~45℃ |
IP等级:IP54 |
安装方式:置地式 |
|
其他型号机器人参数见机器人产品手册。
2 气动吸盘组件
a 气管:包括真空气管和反吹气管,出气用于制造负压,进气用于释放物品。
b 吸盘(包括负压传感器):用于吸取码垛物品,达到一定负压阈值后传感器将输出高电平信号。
c 机器人管线包:机器人管线包是为了沿臂固定气管和负压传感器的线缆,使他们在吸盘旋转时不会缠绕在机械臂上以引起气管脱落等风险。
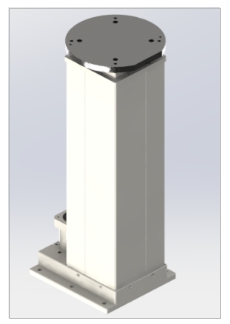
3 升降柱(或固定柱):控制机械臂升高与降低,决定的码垛能达到的层数,包括了驱动器和电机。
4 控制柜组件
a DC30D-J9控制器:GCR25 配套的控制器,能够控制整体码垛站的所有任务,采用控制柜形式模块化工作站,方便快速部署维修。

b 空气开关:空气开关可以用来保护电路和设备免受过载、短路等故障的损坏,并确保电路的安全运行。也可以用于开关电路,控制各种电气设备的启动、停止和运行。
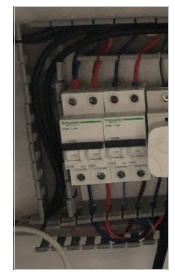
c 通断开关:控制整站的上下电,白色箭头水平向左指向O代表电路关闭,将开关向右旋转90°指向I则接通电路。

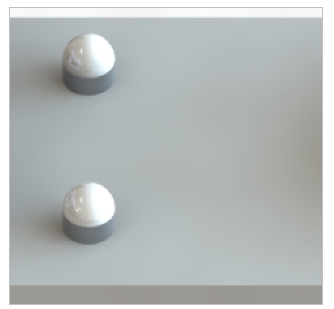
d 安全传感器(选配)用于设置安全区域:用于保证在指定区域有人员或异物时使机器停止运行,也可监控当有人员进入机器人工作区域时机器人停止运行。

e 三色灯带蜂鸣器:提供现状态指示,警示提醒当前状态。
码垛工作站规格#
型号 |
PS-6-STA |
PS-6-FLA / PS-6-PRO |
工作半径 |
1800 mm |
|
最大托盘规格 |
1200×1200 |
|
最大高度 |
1600 mm(固定底座) |
2400 mm(升降底座) |
升降柱高度 |
无 |
1050 mm |
最大抬升高度 |
无 |
600 mm |
码垛速度 |
6-8 箱/分 |
|
重复定位精度 |
±0.05 |
|
通讯方式 |
TCP/IP |
|
IP等级 |
IP54 |
|
温度范围 |
0~55 ℃ |
|
额定功率 |
1.5 kW |
|
电源供应 |
100~220 V AC |
|
整机重量 |
370 kg |
430 kg |
占地面积 |
3500×1700(含伸长杆) |
|