基本配置#
在生产配方管理页面,选择好生产配方后打开生产配方,进入配置模式的操作说明子页面,如下图所示。
阅读此操作说明然后进入基本配置页面操作。
箱体参数配置#
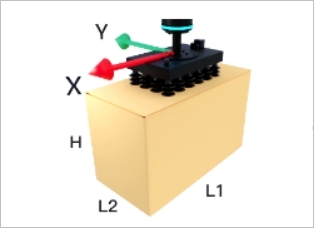
根据实际情况来调节箱体尺寸大小和箱体质量,其中箱体的边1、边2、高度分别是沿着TCP坐标的X轴、Y轴和Z轴,如下图。
Note
注意: 箱体参数必须设置,否则运行时会报错!
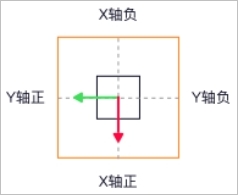
箱体正面(标签方向)与后期的垛型配置相关。箱体的标签方向默认指向基于末端TCP坐标的X轴正方向,若要准确控制箱体朝向(图案面或标签面), 需要打开标签方向启用开关,并通过点击“标签换向”按钮,逆时针切换箱体的正面朝向(基于末端TCP坐标系的X、Y轴的正负方向)如下图, 并保证箱体方向的一致性正交。

如下图,请根据下方的TCP坐标系正确选择箱体的正面朝向。
吸盘工具坐标系与箱体正交,如下图所示。
取料点配置#
取料点是机器人末端吸取箱体的点位,如下图。

Note
注意: 取料点系统未设置,需用户自行设置,否则运行时会报错!
选择“取料点”→“示教”即进入调整机器人末端拿取物料点的示教弹窗。 在弹出的窗口进行手动示教,其中第一列为关节点动、第二列为末端六自由度点动、第三列为升降轴点动,如图下所示。

示教完成后点击“记住当前点”退出示教窗口。
Note
- 注意事项:
通过滑块可调节机器人示教过程中运行速度;
点击“按住调平”即可令机器人末端的姿态参数RX、RY全部调整至末端水平;
点击“按住归零”即可令升降轴位置回到零位;
点击“记住当前点”即可使得本次位姿调整生效;
后续的示教过程皆可参考此处,后文不再复述解释。
点击“移动到此点”即可令机器人末端移动到刚刚示教的取料点位置。
Note
- 注意事项:
按住“移动到此点”会令机器人持续运动,放开则中止,到达预设点位后按住无效,请注意移动过程中的碰撞干涉风险,后续不再复述。
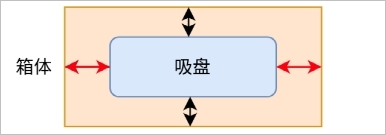
取料点示教时请注意所放吸盘的位置应使得吸盘到箱体的上下(左右)边的距离一致,如下图所示。
托盘参数配置#
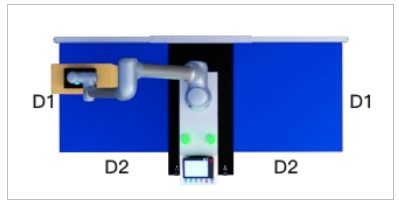
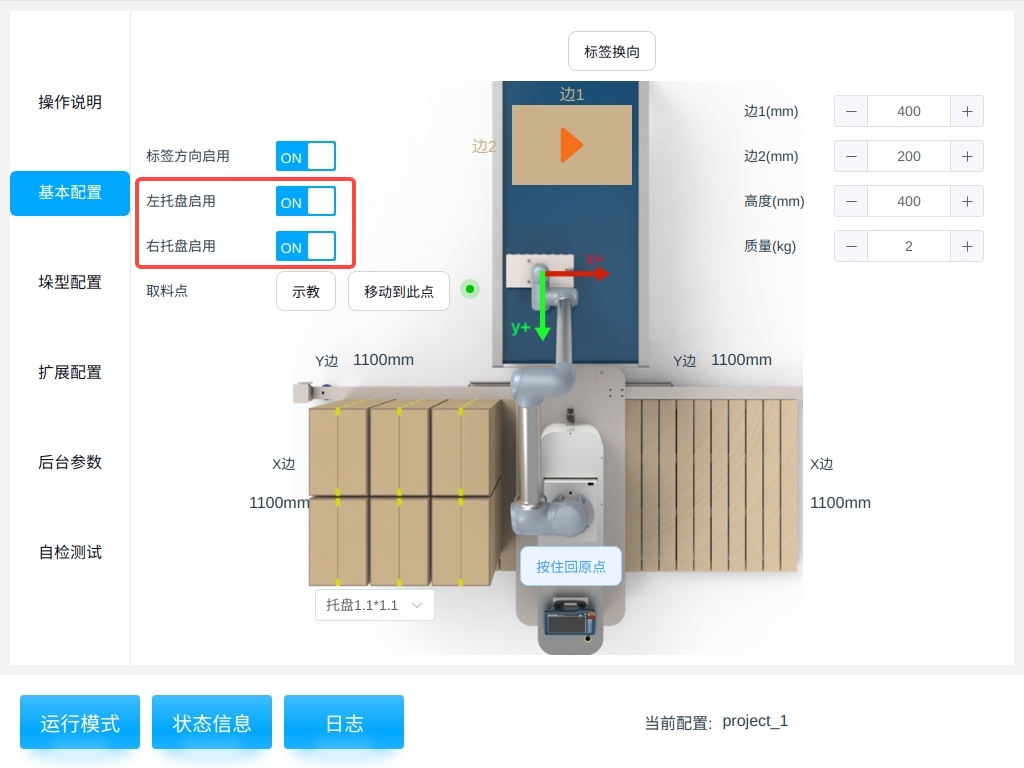
根据实际情况选择“ON/OFF”来决定左/右托盘是否启用。如果不启用,则在码垛时该托盘不会放置任何箱体,如下图所示。
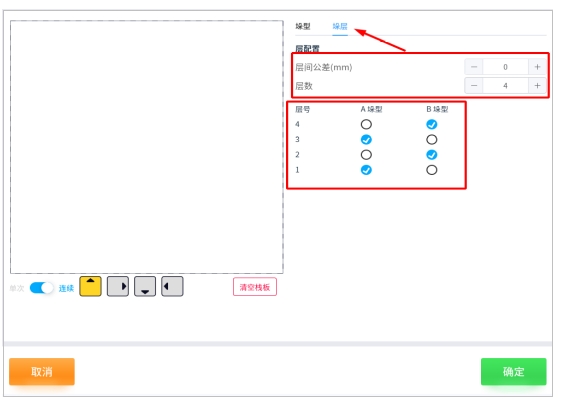
托盘尺寸大小可选项有4个选项,其中3个为预设大小尺寸选项,如下图。

用户可以选择自定义选项根据实际情况调节托盘尺寸参数,X边、Y边为托盘边长,如下图所示。
