垛型配置#
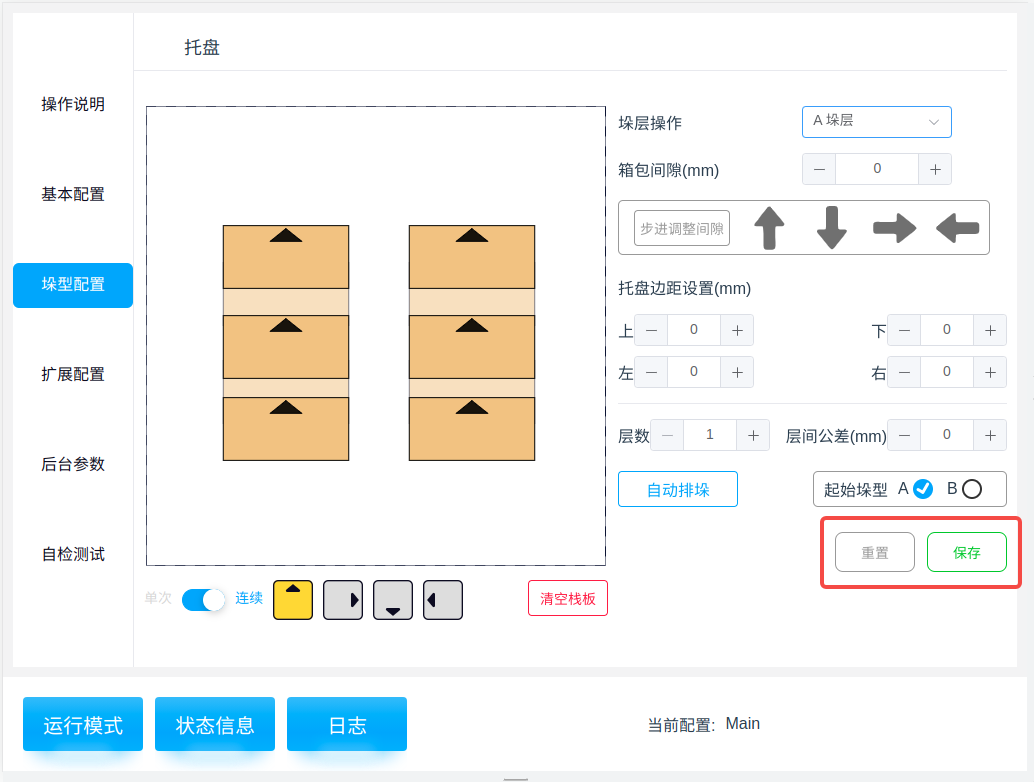
在基本配置页面配置好垛板参数和箱体参数后可进入垛型配置页面进行后续操作,如下图所示。

垛型配置页面分为左右两侧区域,左侧区域是垛型的呈现结果,右侧区域是对垛层参数的配置。
Note
注意: 垛型未配置时运行会报错!
自动排垛#
自动排垛页面通过点击“自动排垛”按钮进入,如下图。
点击进入“自动排垛”后,可根据实际情况选择垛型种类、对齐模式、正面方向和最大垛高。其中,最大垛高可选择“自动”或“自定义”两种模式。
在垛型种类中,
棋盘式:箱体全部水平或竖直摆放;
回旋式:以圈层为单位,回旋式摆放箱体;
纵横式:以列为单位,纵横式摆放箱体。
在对齐模式中,
居中:将箱体聚集在一起,居中摆放;
拉伸:将箱体分散放置,箱体之间具有一定的距离。
在正面方向中,
一致:以列为单位,箱体标签的正面方向摆放一致;
向外:以圈层为单位,箱体标签的正面方向摆放向外。
在最大垛高的设置中,
自动:即从最高高度开始进行可达性检查,知道所有箱体均可达;
自定义:从给定高度向下开始寻找符合条件的最大高度。
Note
注意事项:
自动排版以基础配置所选垛型为配置模板,且B垛为A垛的顺时针90度排列;
A、B垛的外轮廓是对齐的。
点击“下一步”,显示自动排版的生成结果,并在下方显示可选择的层数、最高可达的垛高以及每垛箱数。
在生成结果中,
层数:基于自动或自定义高度自动计算的可达层数;
垛高:修改层数时自动更新相对应的垛高;
箱数:修改层数时自动更新相对应的箱数。
图为自动排垛的生成情况:
参数设置区域#
层数、层间公差: 可以根据实际情况调整层数和层间公差;

Note
注意:
“层间公差”是机器人末端在放置箱体时为箱体所预留的一定高度,正值为间隙,负值则会压紧,请按实际情况微调。下图为层间公差为正的示意图。

起始垛型:选择起始层排垛的垛型;
前提: 在工站配置页面,提供选择是否层间垛型交替;
选择否,且起始垛型为A,则每层都以A垛型来排垛;若起始垛型为B,则每层都以B垛型来排垛;
选择是,且起始垛型为A,则当前垛层排布为A、B、A、B …;起始垛型为B,则当前垛层排布为B、A、B、A …;

垛层操作:可切换A、B层进行垛型配置操作;
托盘边距设置:箱体与垛板外沿的参考边界距离(毫米),正值为边界内缩,负值为边界外扩;垛板配置为实线,边距参考线为虚线;
操作区域#
左侧为垛型的可视化区域,同时也可以对箱体进行操作,如放置、选中、旋转、删除、调整间隙等操作;
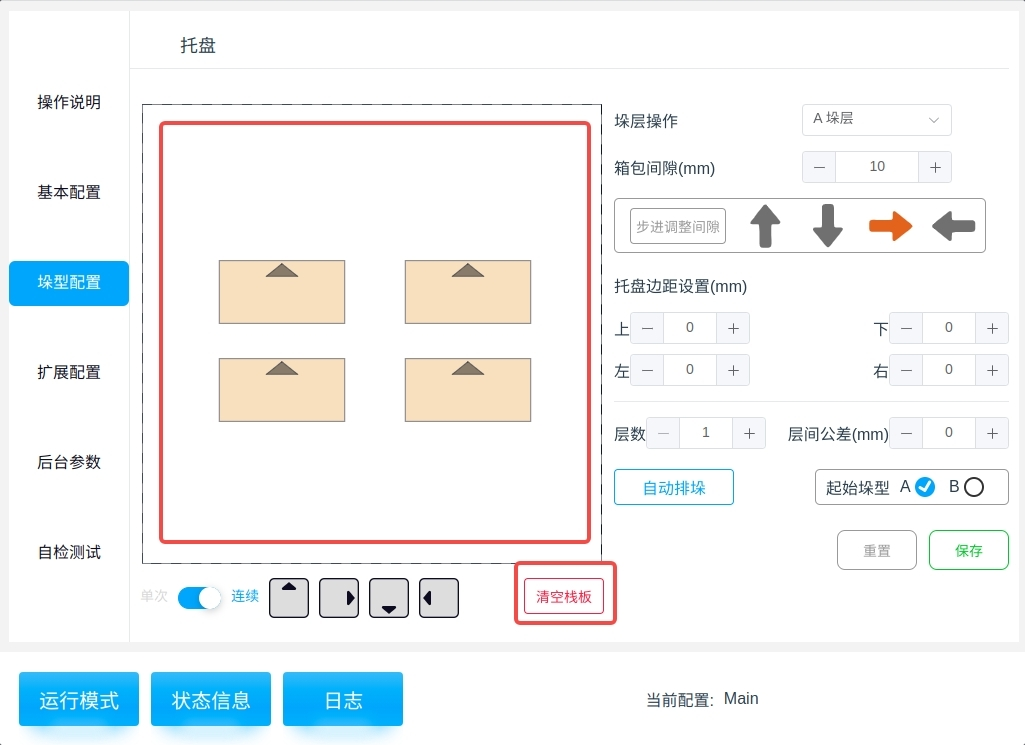
放置 : 可手动放置箱子,在左侧底部的图标中,“单次/连续”决定是否连续放置箱体于图层,带有箭头的四个灰色图标代表着四种不同正面朝向的箱型;
选中 (单选): 点击某个已排好的箱子,可以进行拖拽、旋转、删除、检查等操作;

操作完成后,点击“对号”按钮,会进行箱体是否重叠的检测,如若重叠会进行提示;
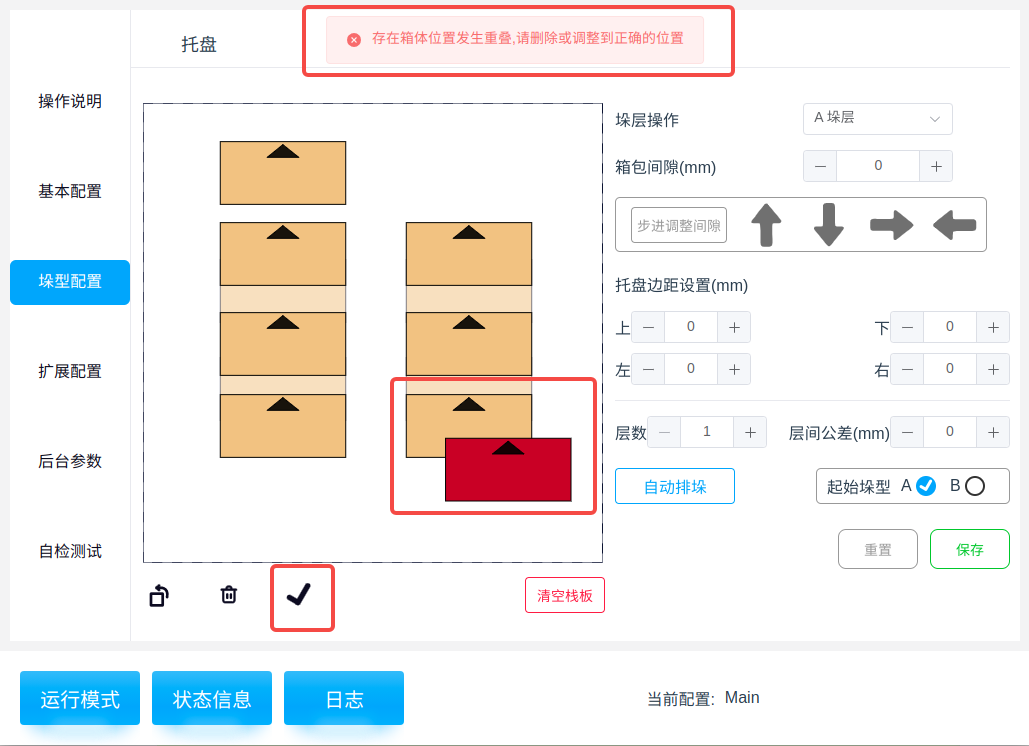
调整间距 (多选):点击“步进调整间距”按钮,按钮从白色变成绿色即开启多选模式,输入箱包间隙,选中想要调整的箱子,点击上下左右的箭头按钮可以在水平或垂直方向移动所选中的箱体;

操作完成后,点击“对号”按钮,会进行箱体是否重叠和是否超出边界的检测,如若重叠或超出托盘边界会进行提示;操作完成后无异常,可再点击“步进调整间距”按钮退出多选模式。

清空垛板 :左侧区域右下方“清空栈板”按钮,点击清空当前垛层所放置的所有箱体,即可重新开始排垛。
注:对当前层(A垛层)做清空栈板操作,画布区域显示的是下层B垛层,且下层颜色为浅黄色;
保存 : 设置完A、B垛层所有参数后,可点击保存按钮。在操作过程中应及时保存已确认的操作部分。
重置 : 提供重置功能,即回到初始状态或上次保存后的状态,且A、B垛层会同时重置,需谨慎操作。