扩展配置#
输送线点位配置#
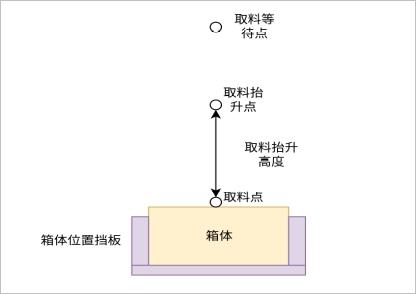
输送线点位配置涉及取料过渡点1/2(可选)、取料等待点、取料点和取料抬升高度,取料等待点、取料抬升点与取料点的关系图如下图所示。 其中,取料抬升点用于在取料点的上方设置一个可以避开挡板对箱体产生干涉的过渡点。
取料过渡点配置#
在取料过程中,取料过渡点是机器人末端去拿箱体时从初始位置到取料等待点的过程中需要避开障碍从而设置的姿态位置点位。 此点位可根据实际情况决定是否配置,即取料完成轨迹流程如下:
取料过渡点1(可选) → 取料过渡点2(可选) → 取料等待点 → 取料点 → 取料抬升点
Note
注意: 务必在升降台归零状态示教取料过渡点!
选择“输送线点位”→“取料过渡点1/2”→“示教”即可进入取料过渡点示教弹窗,在弹出的窗口进行示教,示教过程参考前文,此处不累述。 如下图,选“ON/OF”来决定取料过渡点的使能,“使能”代表是否激活该取料过渡点,不激活则不会经过此点。

Note
注意: 未示教取料过渡点时使能开关被禁用!
取料等待点配置#
取料等待点一般位于取料抬升点的上方,此点位用于等待箱体到位信号被触发。
系统默认已设置此点位,用户可自定义修改。选择“取料等待点”→“示教”即进入调整机器人末端拿取物料等待点的示教弹窗。 在弹出的窗口进行示教,示教过程参考前文,此处不累述,如下图。
取料点、取料抬升高度配置#
取料点配置在基本配置页面进行配置,示教过程请参考前文说明,此处不累述。 取料抬升高度配置在后台参数页面进行设置,详情请见后文说明。
吸盘分区使能配置#
当选择非系统预设的工站配置时,未启用吸盘自动分区计算参数,用户可以手动选择启用的吸盘分区,且能被启用的分区个数与设置的真空信号数相等。 若选择启用分区1和分区3如下图,在取料时,将打开吸盘的分区1和分区3,且可以点击“打开”或“关闭”来手动对吸盘进行操作。

码垛过渡点配置#
在码垛时,过渡点是机器人末端拿取箱体后从取料抬升点到后续放置点的过程中需要避开障碍从而人为设置的姿态位置点,即轨迹流程如下:
取料抬升点 → 过渡点1(可选)→ 过渡点2(可选) → 过渡点3(可选) → 后续放置点(自动生成)
Note
注意: 务必在升降台归零状态示教过渡点!
选择“左/右垛”→“过渡点1/2/3”→“示教”即可进入码垛过渡点示教弹窗,在弹出的窗口进行示教,示教过程参考前文,此处不累述。 如下图,选“ON/OF”来决定过渡点的使能、升降联动。其中, “使能”代表是否激活过渡点,不激活则不会经过此点; “升降联动”代表着机器人末端经过该点是否会随着升降台自动抬升。

Note
- 注意:
未示教过渡点时使能开关和升降联动开关被禁用!
过渡点1默认已示教,且使能开关已启用!
“升降联动”的示意图如下图所示,左子图为在过渡点时的机器示教状态,若未打开升降联动则当升降台上升时机器人末端并不会上升(即如中间子图所示), 若打开升降联动则当升降台上升时机器人末端随之上升(即如右子图所示)。

升降柱配置#
此处显示目前升降柱的启用状态、连接状态、当前高度和行程范围,并且可以通过手动调整来改变升降柱的当前高度。 “按住回零”即可使升降台恢复到零位,如下图所示。

Note
注意: 升降柱未启用时,码垛过渡点的使能和升降联动开关会被禁用!