后台参数#
点击“后台参数”标签,进入后台参数子页面,可设置垛板坐标系偏置及吸盘、升降柱相关参数。
垛板坐标系配置#
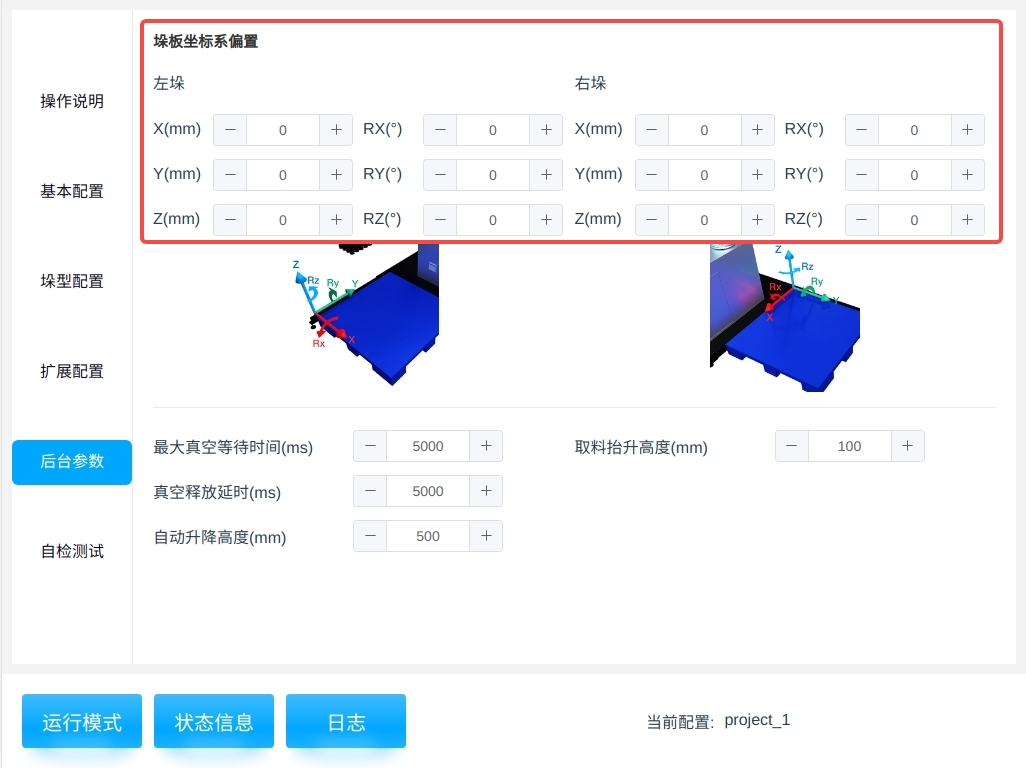
后台参数子页面上方可设置垛板坐标系偏置,用来应对垛板所放置地面不够平整时,导致机器人末端放置箱体不够精确的问题,如下图所示。
吸盘及升降柱参数配置#
后台参数子页面下方可对吸盘、升降柱相关参数进行设置,如下图所示。
最大真空等待时间: 单位ms,该参数是机器人末端在吸取箱体的过程中,需要吸盘产生足够真空的最大时间。 如果没有在规定的时间内产生足够的真空,则会报故障。最大真空等待时间可以根据实际情况决定。
真空释放延时: 单位ms,机器人到达放料点,关闭真空信号后,延时一定时间,即真空释放延时参数的设定值, 确保吸盘完全脱离箱体后才运动机器人,从而避免箱体未完全脱离吸盘产生碰撞。
自动升降高度: 单位mm,根据实际情况通过设置该参数,来使得箱体码放位置高于该高度时可以自动升降;
取料抬升高度: 单位mm,设置取料抬升高度的目的为通过调节取料抬升高度来避免机器人末端取料过程中挡板的干涉。 直接点击数字来激活数字键盘进行输入,或者选择“+” 和“-”来调节机器人末端拿取物料的抬升高度。