


安全#
概述#
本章介紹了在安裝、使用和維護機器人及其部件時需要注意的安全事項與風險評估等重要訊息,在機器人第一次通電前,使用者必須閱讀並理解這些資訊。
在執行任何操作之前,請確保已閱讀隨設備提供的所有操作說明,特別是危險、警告和注意等可能危及人身安全和設備安全的說明,以最大限度減少事故發生幾率。當本文內容與隨裝置出貨的文件有差異時,請以隨裝置出貨的文件為準。
負責安裝和維護設備的人員必須是經過訓練並且已經掌握了正確操作方法和所有安全預防措施的專業人員。只有經過訓練的合格人員才能執行設備安裝和維護作業。
有效範圍與責任說明#
這些資訊不包含如何設計、安裝和操作完整的機器人系統,也不包含可以影響整個系統的安全的所有周邊設備。為了保護人員安全,必須設計完善的系統,並且必須按照機器人安裝所在國家/地區的標準和法規中規定的安全要求進行安裝。
機器人整合商應負責確保機器人系統遵守所在國家或地區的適用安全法律和法規,並且用於保護機器人系統操作者的必要安全設備設計合理且安裝正確。
具體包括但不限於以下幾點:
確保機器人系統符合所有基本要求;
對完整的系統執行風險評估;
確保整個系統的設計安裝準確無誤;
在軟體中進行適當的安全設置,並確保不會被使用者修改;
制定詳細的操作說明;
出具符合性聲明;
將所有資訊收集到技術文件中;
在安裝的機器人系統上標示整合商的標誌和聯絡資訊。
中科新鬆有限公司致力於提供可靠的安全信息,除非中科新鬆有限公司在提供可靠安全信息方面存在故意或重大過失,否則中科新鬆有限公司對此不承擔責任。需要明確的是,即使一切操作都按照安全操作進行,也無法確保機器人系統不會造成使用者的人身和財產損失。
因以下原因造成的用戶損失,中科新鬆有限公司將不對此承擔責任:
不可抗力事件(例如,天災、火、戰爭等);
機器人系統自然損壞或磨損;
現場運作環境(例如,電壓、溫度、濕度等)或外部因素(例如,外部幹擾等)無法滿足已提示的正常運作的環境要求;
機器人系統未正確安裝(包括搬遷後未重新正確安裝);
因使用者或第三方的故意或疏忽、使用不當(包括使用者未依本使用手冊及/或中科新鬆有限公司其他要求使用)或蓄意破壞行為。
除非另有約定,因使用機器人系統所造成的間接、特殊、偶發損失,包括但不限於收入損失、實際或預期收益損失、業務損失、機會損失、商譽損失、名譽損失、數據的遺失、損壞或洩漏等,中科新鬆有限公司均不為此負責。
風險評估#
風險評估是整合商必須完成的最重要任務之一。機器人本身是一個部分完成的機械,而機器人安裝的安全性取決於該機器人是如何整合的(例如:工具、障礙物及其他機械)。
建議集成商按照國際標準ISO 12100、ISO 10218-2、ISO/TS 15066(或者相應國家標準,如中國標準 GB 15706、GB 11291.2、GB/T 36008)中的規定執行風險評估。整合商執行風險評估時應考慮機器人整個應用壽命期間的所有工作程序,包括但不限於:
在開發機器人安裝時示教機器人;
故障診斷與維護;
機器人安裝的正常操作。
風險評估必須在機器手臂第一次通電前進行。由整合商執行的風險評估的一部分是識別正確的安全配置設置,以及確定是否需要額外的緊急停止按鈕和其他保護措施。
下列明確了整合商必須考慮的重大危險。請注意,特定機器人設備可能還有其他重大危險。
手指夾在機器人關節4和關節5之間。
工具或工具連接器上的銳邊和尖點刺傷皮膚。
機器人軌跡附近障礙物上的銳邊和尖點刺傷皮膚。
因機器人有效負重與堅固表面之間的衝擊而導致扭傷或骨折。
因用於固定機器手臂或工具的螺栓鬆動而導致的後果。
物品從工具上掉落,例如因夾持不到位或斷電。
因不同機器上緊急停機按鈕不同而出現的操作錯誤。
如果將機器人安裝在無法使用其內部安全功能(例如使用危險工具)充分消除風險的非協作機器人應用中,則係統整合商必須根據風險評估安裝其他保護裝置(例如,使用能夠在安裝和編程期間對整合商提供保護的保護裝置)。因未安裝保護裝置所導致的損失,中科新鬆有限公司將不為此負責。
安全操作#
緊急停機#
緊急停機是優先於所有其他機器人控制操作的狀態,將會導致所有受控的危險停止,從機器人驅動器消除馬達供電,在重置前一直保持有效,並且只能透過手動操作來重設。
緊急停止狀態意味著動力系統斷開,機器人無法移動。使用者必須執行還原步驟,即重設緊急停止按鈕並按下示教器上的「開機」按鈕,以恢復正常操作。緊急停機不可用作風險降低措施,但是可作為次級保護設備。
緊急停機不得用於正常的程序停止,因為這可能會給機器人帶來額外的不必要磨損。
安全相關的功能#
安全功能簡介#
GCR系列機器人搭載多種內建安全功能以及緊急電氣介面的安全I/O、數位與類比控制訊號,用於連接其他機器人及附加的保護裝置。
停機類別#
根據具體情況,機器人可以啟動三種根據IEC60204-1定義的停機類別。這些類別在下列描述中定義。
0(SS0)
立即切斷機器人動力電
1(SS1)
立即將各關節以最快的加速度降速為0,關節靜止後彈起抱閘,切斷機器人電源
2(SS2)
在保持軌跡的同時將機器人減速至靜止,靜止後各關節保持使能狀態,抱閘無動作
停機類別之間的切換:
執行1類停機時,會同時觸發計時器。如果到達500ms之後,機器人的速度仍超過設定的安全速度,會轉而執行0類停機。
安全功能#
下表列出的新鬆多可協作機器人安全功能位於機器人中,其目的是控制機器人系統,即機器人及連接的工具/末端執行器。機器人安全功能用於減少由風險評估確定的機器人系統風險。
Emergency Stop (ES)
執行SS1。
Protective Stop
執行SS2。
Safe Operating Stop (SOS)
ss2執行完成後會觸發SOS監控,監控目前機器人位置偏移,若違例觸發SS0。
Joint Safe Limited Position (SLP)
根據關節位置門限值設定,當關節位置達到門限值時,觸發SS2。如果觸發關節位置限制,則直接觸發SS0。
Joint Safe Limited Speed (SLS)
根據關節速度門限值設定,當關節速度達到門限值時,觸發SS2。如果觸發關節速度限制,則直接觸發SS0。
TCP Position Limit
可以設定安全區域限制機器人的作業區域,根據門限值設置,當到達門限值時,觸發SS2。如果離開安全空間後,安全控制器觸發SS0。最多允許設定6個安全區域、3個TCP座標系。
Tcp Speed Limit
根據TCP速度閘限值設定,當TCP速度達到閘限值時,觸發 SS2。如果觸發Tcp速度限制,安全控制器直接觸發SS0。
Elbow Position Limit
根據門限值設置,當達到閘限值時,觸發SS2。如果觸發elbow位置限制,安全控制器直接觸發SS0。
Elbow Speed Limit
根據肘部速度門限值設置,當肘部速度達到門限值時,觸發SS2。如果觸發肘部速度限制,安全控制器直接觸發SS0。
Joint Torque Limit
根據關節力矩門限值設置,當關節力矩達到門限值時,觸發SS2。如果觸發關節力矩限制,安全控制器直接觸發SS0。
Tcp Force Limit
根據Tcp力門限值設置,當Tcp力達到門限值時,觸發SS2。如果觸發Tcp力限制,安全控制器直接觸發SS0。
Elbow Force Limit
根據肘部力門限值設置,當肘部力達到門限值時,觸發SS2。如果觸發肘部力限制,安全控制器直接觸發SS0。
Power Limit
根據功率門限值設置,當功率達到門限值時,觸發SS2。如果觸發功率限制,安全控制器直接觸發SS0。
Mode Switch Input
可選擇是否啟動模式切換硬體輸入,停用該硬體輸入時,可透過UI切換,但並非兩者同時有效。模式切換時觸發SS2,如果目前正在執行腳本,腳本將進入暫停狀態,後續可以繼續執行。
Enable Device Input
可以選擇是否啟用該硬體輸入。此輸入只在手動模式下有效,自動模式下無效。違例觸發SS2。
Protective Stop Input
此輸入各種模式下均有效。該輸入會觸發SS2。如果未啟動防護reset輸入,輸入訊號消失後,SS2自動重位,否則需要觸發防護reset輸入才可重設。
Protective Stop Reset Input
可以選擇是否啟動該輸入訊號。如果啟動了防護reset輸入,且觸發防護停止輸入後觸發SS2,當防護停止輸入訊號消失後,需要觸發防護reset輸入訊號才會重設SS2。此輸入訊號上升沿有效,且高電位需要保持500ms。
Automatic Protective Stop Input
可以選擇是否啟用該硬體輸入。此輸入僅在自動模式下有效,此輸入在自動模式下會觸發SS2。若未啟動防護reset輸入且未啟動自動模式防護reset輸入,輸入訊號消失後,SS2自動重位,否則需觸發防護reset輸入或自動模式防護reset輸入才可重設。
Automatic Protective Stop Reset Input
可以選擇是否啟用該硬體輸入。和防護reset輸入訊號相似,但僅針對自動模式下自動防護停止輸入觸發的SS2有效。
System Emergency Stop Output
此輸出各種模式下均有效。當系統急停觸發時會輸出該訊號。
Protective Stop Output
可以選擇是否啟用該硬體輸出。當觸發防護停止輸入並觸發SS2時會輸出此訊號。
Automatic Protective Stop Output
可以選擇是否啟用該硬體輸出。僅在自動模式觸發防護停止或自動模式防護停止輸入並觸發SS2時會輸出此訊號。
Reduce Mode
可以選擇是否啟用該硬體輸入。此輸入會觸發進入縮減模式,並使安全參數採用縮減模式相關參數。
Reduce Mode Output
可以選擇是否啟用該硬體輸出。當觸發縮減模式輸入並進入縮減模式時會輸出該訊號。
Recovery Mode
當觸發關節位置限制、Tcp位置限製或肘部位置限制並觸發SS0後,在復位SS0並重新對機器人進行上電後,此時由於機器人關節、Tcp或肘部仍然處於觸發位置限制的狀態,機器人系統會進入恢復模式。恢復模式下,機器人僅可進行關節Jog,且關節速度不超過30deg/s,末端速度不超過250mm/s。在機器人關節、Tcp及手肘都回到位置限制門限範圍內後,會自動退從恢復模式退出並回到正常或縮減模式。
安全IO介面#
安全IO接口是控制櫃提供的外部急停及安全輸入輸出接口,包括1路急停信號輸入(被動信號)、1路急停反饋輸出(有源信號)、1路保護性停止輸入(無來源訊號)、2路可設定安全輸入(被動訊號)、2路可設定安全輸出(主動訊號),其中急停訊號輸入、保護性停止輸入以及可設定安全輸入為高電位有效,有效電平為:11V-30VDC;另外在使用可設定安全輸出和急停回授輸出時,需接繼電器進行轉接。
可設定安全輸入可設定為:防護reset輸入、自動模式防護停止輸入、自動模式防護reset輸入、reduce模式輸入。可設定安全輸出可配置為:防護停止輸出、自動模式防護停止輸出、reduce模式輸出。其介面定義如下表:

編號 |
訊號定義 |
編號 |
訊號定義 |
|---|---|---|---|
1 |
EI1+ (急停訊號輸入1+) |
2 |
EI1- (急停訊號輸入1-) |
3 |
EI2+ (急停訊號輸入2+) |
4 |
EI2- (急停訊號輸入2-) |
5 |
PSI1+ (保護性停止輸入1+) |
6 |
PSI1- (保護性停止輸入1-) |
7 |
PSI2+ (保護性停止輸入2+) |
8 |
PSI2- (保護性停止輸入2-) |
9 |
CSI1_1+ [可設定安全輸入1(1+)] |
10 |
CSI1_1- [可設定安全輸入1(1-)] |
11 |
CSI1_2+ [可設定安全輸入1(2+)] |
12 |
CSI1_2- [可設定安全輸入1(2-)] |
13 |
CSI2_1+ [可設定安全輸入2(1+)] |
14 |
CSI2_1- [可設定安全輸入2(1-)] |
15 |
CSI2_2+ [可設定安全輸入2(2+)] |
16 |
CSI2_2- [可設定安全輸入2(2-)] |
17 |
E01+ (急停回授輸出1+) |
18 |
E01-(急停回授輸出1-) |
19 |
E02+ (急停回授輸出2+) |
20 |
E02-(急停回授輸出2-) |
21 |
CSO1_1+[可設定安全輸出1(1+)] |
22 |
CSO1_1-[可設定安全輸出1(1-)] |
23 |
CSO1_2+[可設定安全輸出1(2+)] |
24 |
CSO1_2-[可設定安全輸出1(2-)] |
25 |
CSO2_1+[可設定安全輸出2(1+) ] |
26 |
CSO2_1-[可設定安全輸出2(1-)] |
27 |
CSO2_2+[可設定安全輸出2(2+)] |
28 |
CSO2_2-[可設定安全輸出2(2-)] |
夾傷與碰撞風險#
機器人實際運作過程中仍有碰撞偵測功能盲區,使用者務必需要注意在特殊工況下碰撞偵測失效或夾傷風險。典型的三類工況如下所述。
工況一:機器人末端位置距離機器人基座中心超過機器人最大工作空間80%範圍以外(機器人3關節位置約小於20°)時,此時若機器人依圖2.6.1與圖2.6.2所示紅色箭頭方向移動,機器人對運動方向上外力敏感度較低,較易發生不受控制的碰撞危險;當機器人依圖2.6.1與圖2.6.2所示綠色箭頭方向產生移動,此時若機器人與外界環境發生碰撞,則對碰撞產生的外力較為靈敏。
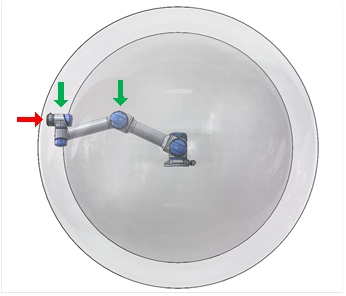
圖2.6.1工況一機器人正視圖
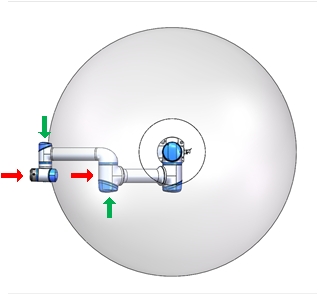
圖 2.6.2 工況一機器人俯視圖
工況二:以機器人基座Z方向為中心,半徑約150-300mm(具體以機器人型號參數為準)的範圍內,若接觸點在該範圍內且接觸力方向與關節三連桿和關節四連桿所構成平面垂直,則碰撞偵測功能較難偵測機器人與外界發生的碰撞。如圖2.6.3與圖2.6.4紅色箭頭所示;此時若機器人與外界接觸力方向與基座標Z方向較一致,則機器人對碰撞產生的外力較為靈敏,如圖2.6.3中綠色箭頭所示。
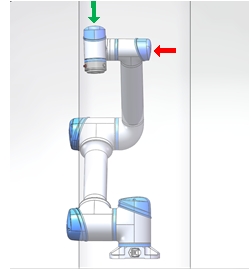
圖 2.6.3 工況二正視圖
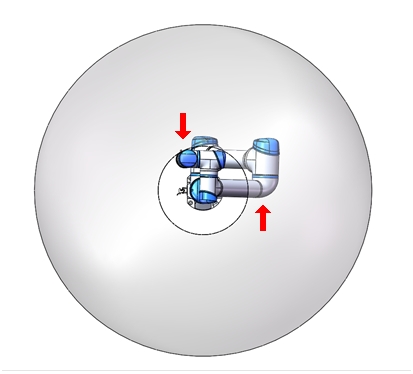
圖 2.6.4 工況二俯視圖
工況三:無論機器人處於何種位姿與何種運動狀態,當機器人與外界發生碰撞時,若碰撞點位於以機器人基坐原點為中心,半徑約為350mm的範圍內,則機器人對該類碰撞較難偵測,較易發生夾傷危險,如圖2.6.5與圖2.6.6中紅色箭頭所示;當碰撞點位於該範圍以外,且不滿足工況一與工況二中所描述的碰撞偵測盲點條件時,機器人較易對與外界產生的碰撞進行偵測,如圖2.6.5與圖2.6.6中綠色箭頭所示。
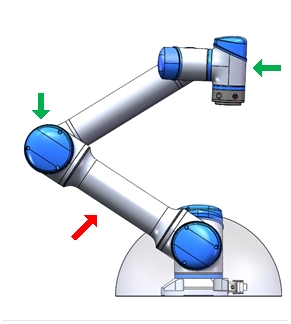
圖 2.6.5 工況三側視圖
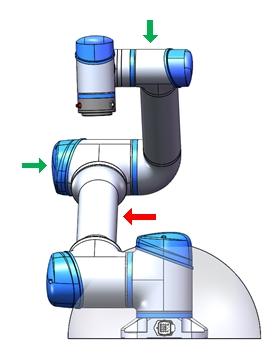
圖 2.6.6 工況三正視圖
針對以上所有描述的工況,若機器人在對外部碰撞檢測不靈敏的方向上移動,考慮到機器人與外界協作力的限制需求,應盡可能減少此時的運行速度。
當夾傷意外不幸發生後,可以使用手動鬆抱閘功能,減輕意外所帶來的損失。
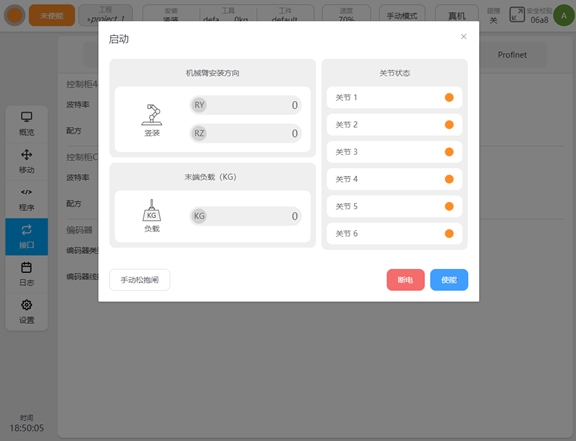
在機器人得電但未使能的狀態下,介面左下角可以啟動「手動松抱閘功能」。點選「手動松抱閘」按鈕後,介面切換如下圖所示:
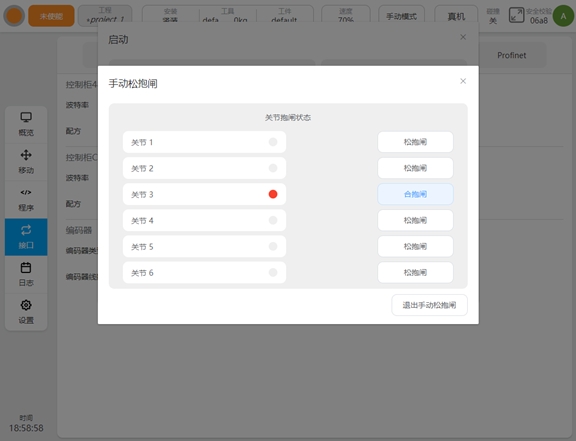
點選「鬆抱閘」按鈕,可將對應關節的抱閘鬆開,此時允許對該關節進行無動力驅動。介面左側的紅色指示燈用於提示抱閘狀態。點選「合抱閘」則將對應關節的抱閘重新閉合。
機器人奇異點失速風險#
機器人在奇異點附近進行運動規劃(直線、圓弧等,不包括關節運動)時會自動降速,示教時應避開奇異點或以關節運動通過奇異點。針對GCR系列構型,存在肩部奇異點、肘部奇異點以及腕部奇異點。
肩膀奇異#
當腕關節中心(五關節J5與六關節J6軸線的交點)處於一關節軸線J1上時,此時造成肩部奇異,導致一關節J1會產生運動位置突變。當腕關節中心位於很接近J1的位置時,也會受到奇異的影響,此時移動末端可能導致1關節不受控制的高速移動。參考下圖為臨近肩部奇異位姿。
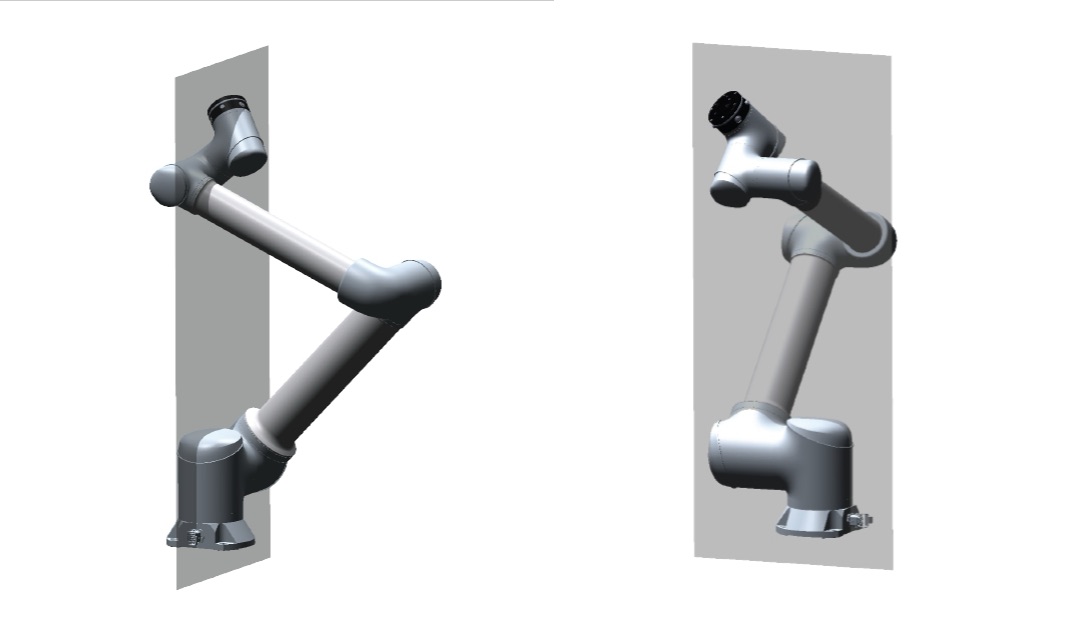
圖2.7.1肩部奇異參考位姿
手肘奇異#
當機器人二關節J2、三關節J3、四關節J4三軸軸線共面時,此時沿著共面所在平面方向進行末端移動會使三關節J3產生位置突變。簡單的,當三關節J3接近0°或±180°時,機器人接近奇異位姿,此時移動末端可能造成二關節J2,三關節J3,四關節J4產生不受控的高速運動。參考下圖接近手肘奇異位:
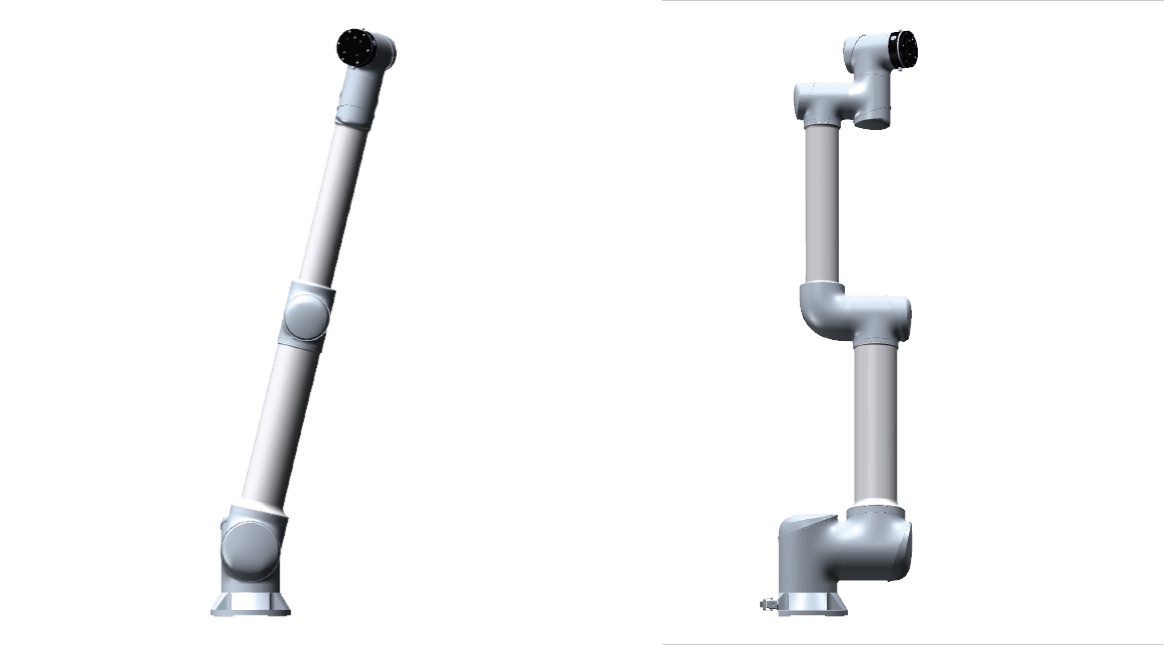
圖2.7.2肘部奇異參考位姿
腕部奇異#
當機器人四關節J4與六關節J6軸線平行時,會發生碗部奇異。此時沿著四關節J4與六關節J6軸線所在平面方向移動機器人末端時會使四關節J4與六關節J6產生位置突變。簡單地,當五關節J5接近0°或±180°時,此時四關節J4與六關節J6會產生不受控制的高速運動。參考下圖:
圖2.7.3腕部奇異參考位姿
當機器人運行到達或接近上述奇異點時,基於笛卡爾座標的規劃運動無法正確的逆解為各軸的關節運動,將無法正確的進行運動規劃,可採用關節點動運動或move j運動指令。
