安全設定#
本小節介紹如何檢視安全配置,變更應用程式安全配置。目前有兩種型號的安全控制器,DucoSafetyV1.0適配DC30控制櫃。 DucoSafetyV2.0適配J9及J9-ZII系列控制櫃。
DucoSafety V1.0#
查看安全性配置#
點擊上方狀態列上的“安全校驗”,彈出如下對話框,可查看目前已啟動的安全性設定參數。
或在設定頁面-安全性設定中也可以查看安全性設定參數

安全配置更改應用#
更改安全配置前必須使用密碼解鎖。進入設定頁面-安全配置,點選左下方的「解鎖」按鈕,僅在機器人斷電的情況下可以解鎖,輸入密碼(目前登陸使用者的登陸密碼),驗證通過後進入安全參數配置模式。此時狀態列上的狀態顯示區顯示為「安全參數配置」。
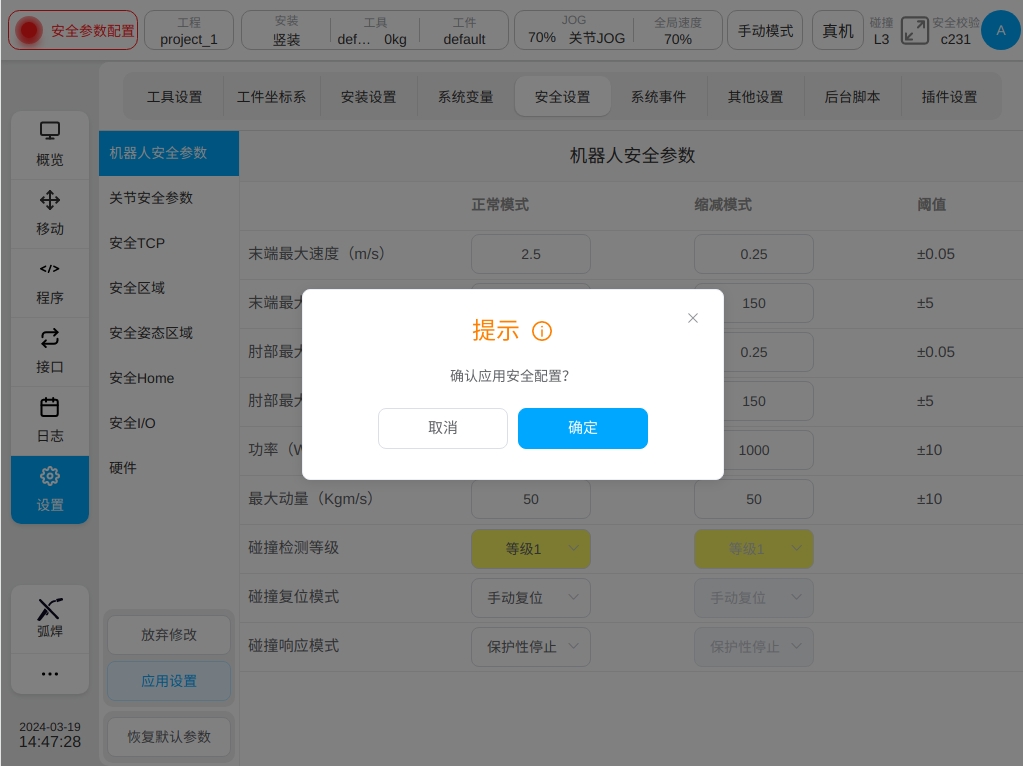
變更配置時,本次的修改內容將會標示為高亮黃色顯示出來。所做的所有變更只有在點擊「套用設定」按鈕時才會生效。點擊“恢復預設設定”,將會將所有的安全參數恢復到預設的出廠設定值。點選「套用設定」按鈕後,會跳出提示框,如圖所示。
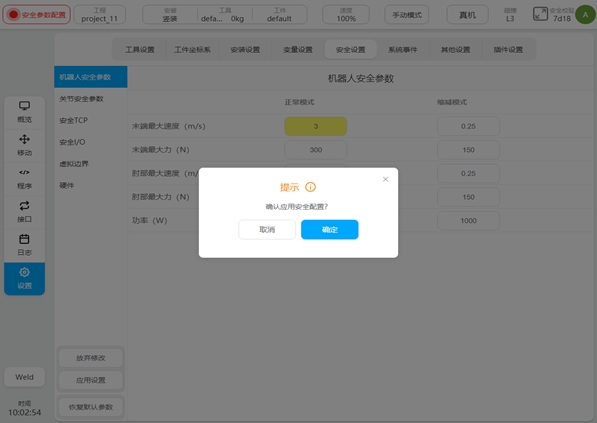
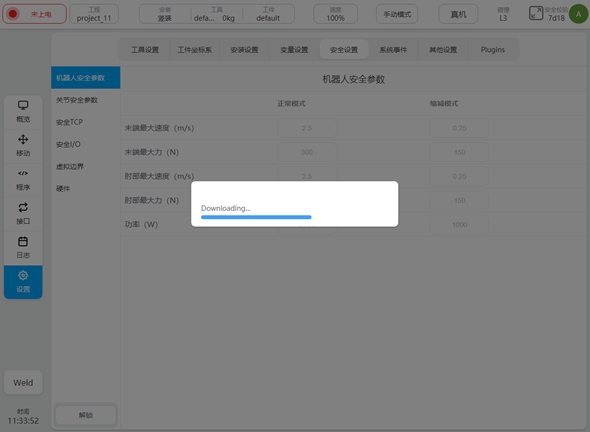
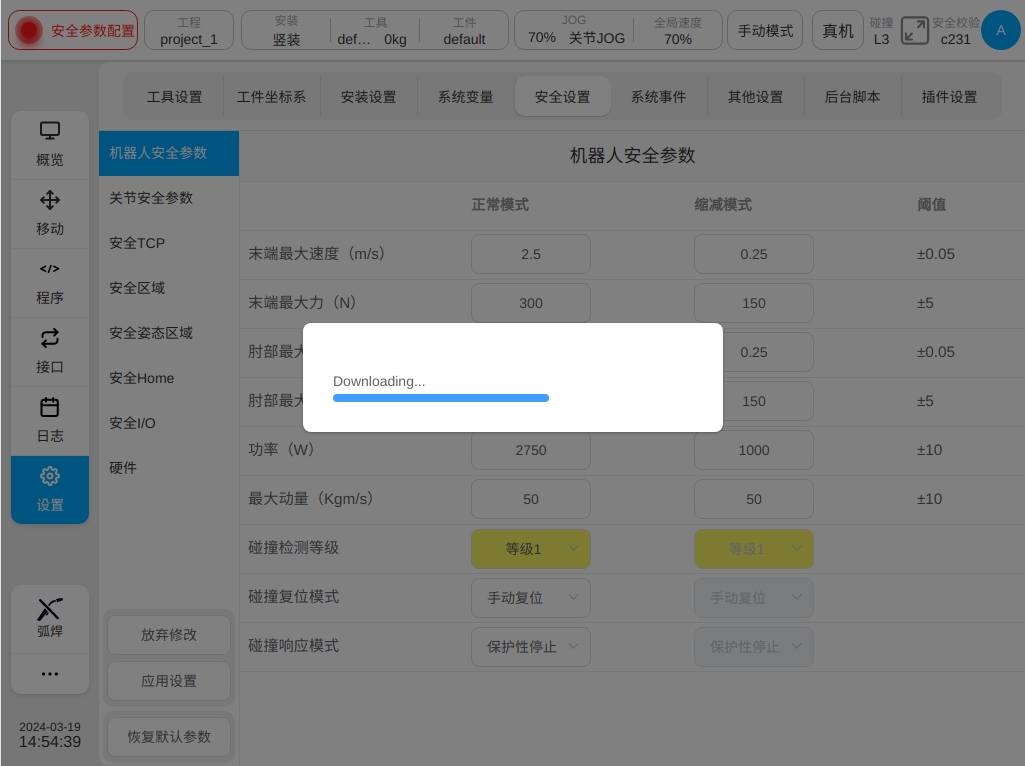
點選「確認」按鈕後,會顯示載入安全參數流程的提示框,如圖所示。
安全性參數配置完成後,系統會將配置的安全性參數再次以彈出視窗的方式顯示,供使用者檢查。如下圖,檢查確認無誤後。點選「確定」按鈕進行安全參數的配置。配置成功後,狀態列上方的安全校驗將會發生變更。

安全參數說明#
本小節將介紹機器人的各項安全配置參數。
安全模式#
正常模式:預設啟動的安全模式
縮減模式:可以使用安全輸入IO啟動縮減模式
恢復模式:當機器人的實際運動參數超出關節位置或Tcp位置安全限制範圍導致機器人觸發SS0並停機。當重設SS0並重新使機器人上電後,由於機器人仍處於關節位置或Tcp位置違例的狀態,此時恢復模式將會啟動。恢復模式下,使用者僅可透過關節Jog操作機械手臂,將機器人移動到安全限制範圍內後恢復模式講過自動退出
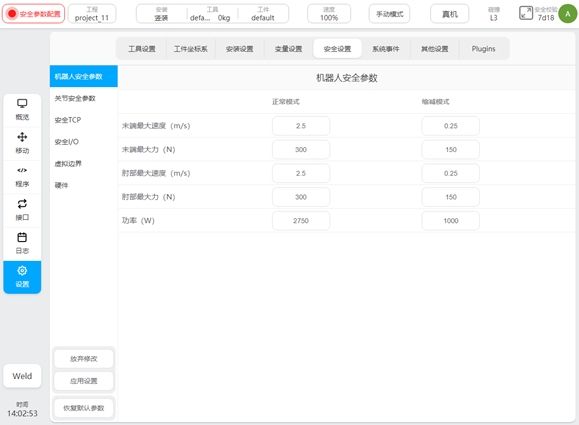
機器人安全參數#
機器人參數用來限制一般的機器人運動。可以配置其在正常模式和縮減模式下的參數值。
末端最大速度 限制機器人末端Tcp的最大線速度
末端最大力 限制機器人末端Tcp允許對外施加的最大力
肘部最大速度 限制機器人肘部的最大線速度
手肘最大力 限制機器人手肘對外施加的最大力
功率 限制機器人產生的最大的機械功

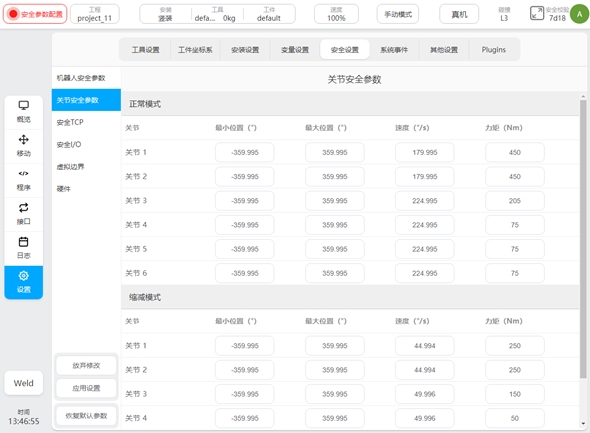
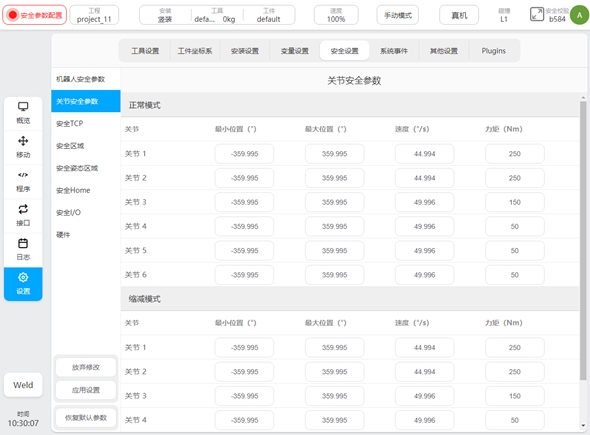
關節安全參數#
關節參數限制用來限制機器人的每個關節的位置範圍、最大速度、最大力矩。可以配置其在正常模式和縮減模式下的參數值
位置範圍:定義各關節的最小位置和最大位置
最大速度:定義各關節的最大角速度
最大力矩:定義各關節最大的力矩
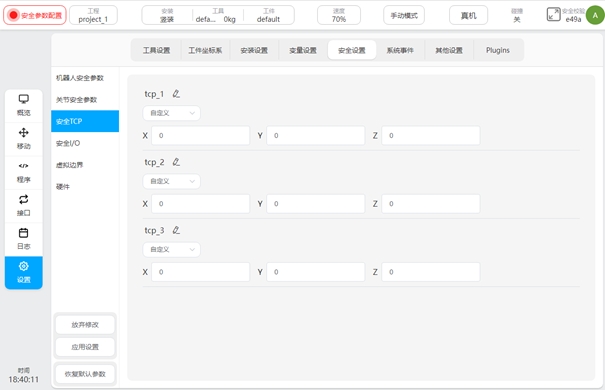
安全TCP#
安全系統可定義三組TCP偏移量,配置後,機器人將以這三組TCP來做速度監控與位置監控。任一個安全TCP的位置、速度超過安全設置,都會觸發安全違例。
速度監控閾值參考「機器人安全參數」中的工具最大速度。位置監控參考「虛擬邊界」中所定義的機器人安全空間。在下拉方塊中可以選擇現有的TCP或自訂直接設定XYZ的值,當選擇現有TCP時,變更X、Y、Z輸入欄位中的值時,下拉式選單中的TCP名稱會變成自定義,表示是新定義的TCP。
在完成了安全參數配置並套用後,再次變更系統中的工具座標系TCP的設定訊息,不會影響已經配置好的安全參數。
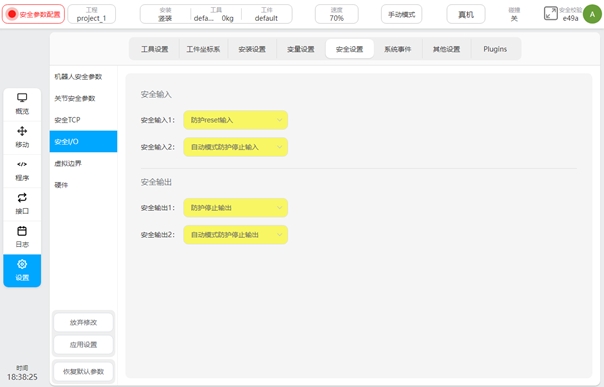
安全IO#
安全IO模組上包含兩路可設定安全輸入連接埠和兩路可設定安全輸出連接埠。
安全輸入功能包含:
防護reset輸入: 當防護停止發生時,觸發該端口,機器人恢復正常狀態
自動模式防護停止輸入:當機器人在自動模式下觸發此連接埠時,機器人執行防護性停止
自動模式防護reset輸入:當自動模式防護停止發生後,觸發該端口,機器人恢復正常狀態
Reduce模式輸入:觸發該端口,機器人將過渡到縮減模式,縮減模式對應的安全參數將啟動。機器人可能會在過渡過程中減速以適應縮減模式所設定的安全參數
安全輸出功能包含:
防護停止輸出:當機器人處於防護停止狀態時,觸發該端口
自動模式防護停止輸出:當機器人處於自動模式防護停止時,觸發此連接埠
Reduce模式輸出:當機器人處於縮減模式時,觸發該端口
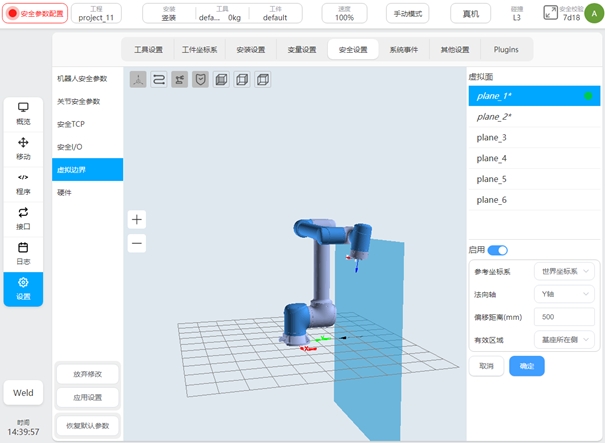
虛擬邊界#
虛擬邊界用來定義機器人的安全工作空間。可定義六個虛擬邊界來限制機器人的安全工具Tcp和肘部運動所能到達的空間位置。
當機器人的工具和手肘觸碰到虛擬邊界時,機器人將執行防護性停止。在此基礎上,若機器人進一步產生移動使安全工具Tcp或肘部超出了虛擬邊界所限制的安全工作空間,則會觸發SS0。
介面上右側綠色指示燈表示該平面已激活,同時3D圖顯上可顯示激活的虛擬邊界的位置和虛擬邊界的有效區域。選取一個平面,3D圖顯示上對應的平面將高亮顯示。
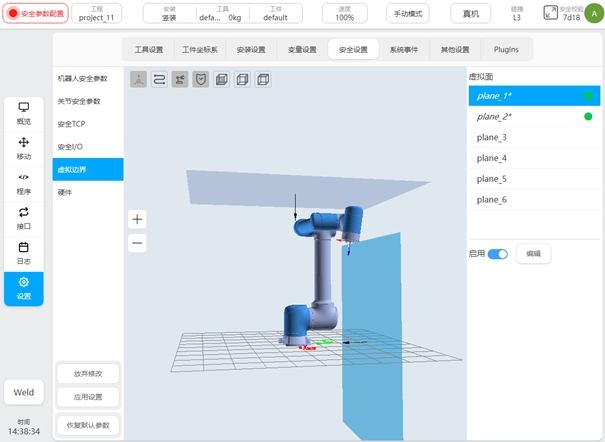
虛擬邊界透過以下方式定義:
選擇一個參考座標系,可選擇世界座標系、基座座標係或設定中定義的工件座標系;選擇參考座標系的一個座標軸(X、Y、Z)作為虛擬平面的法向軸,設定沿著此座標軸的偏移距離,偏移距離為正值時表示沿著座標軸正向偏移,當負值時表示沿著座標軸負向偏移。如此則確定了一個平面,然後選擇機械手臂的有效活動區域參考定義好的平面是否與機器人基座所在位置處於同一側。例如選擇參考座標系為基座座標系,選擇Z軸為法向軸,偏移距離設定為600mm,則虛擬平面為基座座標系XoY平面向Z軸正向偏移600mm形成。
下圖為對應的交互,選取一個平面,點選「啟用」、「編輯」按鈕,選擇參考座標系、法向軸、輸入偏移距離、選擇有效區域。點選「確定」按鈕即可定義該虛擬邊界,虛擬平面上顯示的箭頭表示機械手臂的活動區域。
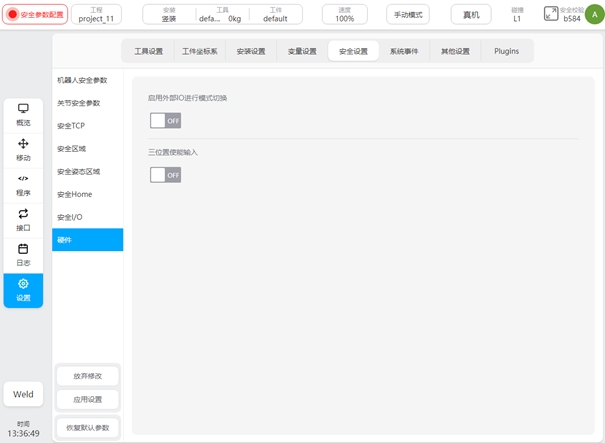
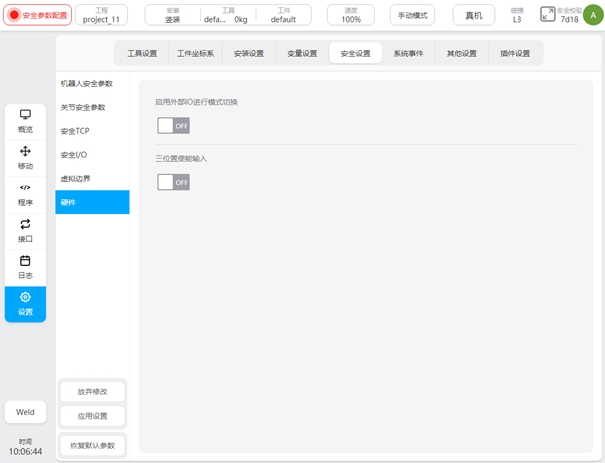
硬體#
包含啟用外部IO進行模式切換和三位置啟用輸入
啟用外部IO進行模式切換:啟用此項,可透過外部IO進行手自動模式的切換,此時介面狀態列上的模式切換功能無效。
三個位置啟用輸入:啟用此項,當機器人處於手動模式下,僅當示教器上的三位置開關處於中間位置才可以移動機器人,機器人在移動過程中任意時刻三位置開關處於非中間位置時都會觸發機器人的暫停。
DucoSafety V2.0#
查看安全性配置#
點擊上方狀態列上的“安全校驗”,彈出如下對話框,可查看目前已啟動的安全性設定參數。
或在設定頁面-安全性設定中也可以查看安全性設定參數

安全配置更改應用#
更改安全配置前必須使用密碼解鎖。進入設定頁面-安全配置,點選左下方的「解鎖」按鈕,僅在機器人斷電的情況下可以解鎖,輸入密碼(目前登陸使用者的登陸密碼),驗證通過後進入安全參數配置模式。此時狀態列上的狀態顯示區顯示為「安全參數配置」。

點選「確認」按鈕後,會顯示載入安全參數流程的提示框,如圖所示。
安全性參數配置完成後,系統會將配置的安全性參數再次以彈出視窗的方式顯示,供使用者檢查。如下圖,檢查確認無誤後。點選「確定」按鈕進行安全參數的配置。配置成功後,狀態列上方的安全校驗將會發生變更。

安全參數說明#
本小節將介紹機器人的各項安全配置參數。
安全模式#
正常模式:預設啟動的安全模式
縮減模式:可以使用安全輸入IO啟動縮減模式
恢復模式:當機器人的實際運動參數超出關節位置或Tcp位置安全限制範圍導致機器人觸發SS0並停機。當重設SS0並重新使機器人上電後,由於機器人仍處於關節位置或Tcp位置違例的狀態,此時恢復模式將會啟動。恢復模式下,使用者僅可透過關節Jog操作機械手臂,將機器人移動到安全限制範圍內後恢復模式講過自動退出
機器人安全參數#
機器人參數用來限制一般的機器人運動。可以配置其在正常模式和縮減模式下的參數值。
末端最大速度 限制機器人末端Tcp的最大線速度
末端最大力 限制機器人末端Tcp允許對外施加的最大力
肘部最大速度 限制機器人肘部的最大線速度
手肘最大力 限制機器人手肘對外施加的最大力
功率 限制機器人產生的最大機械功
最大動量 限制機器人產生的最大動量,機器人末端負載視為機器人本體的一部分
撞擊偵測等級 機器人偵測與外部碰撞的靈敏度,等級越高靈敏度越高
碰撞復位模式 機器人碰撞後復位的方式
碰撞反應模式 機器人發生碰撞時響應方式,其中「零力回彈」響應模式會在機器人偵測到碰撞後響應碰撞力並產生回彈移動。

關節安全參數#
關節參數限制用來限制機器人的每個關節的位置範圍、最大速度、最大力矩。可以配置其在正常模式和縮減模式下的參數值
位置範圍:定義各關節的最小位置和最大位置
最大速度:定義各關節的最大角速度
最大力矩:定義各關節最大的力矩
安全TCP及工具#
安全系統可定義三組TCP偏移量,配置後,機器人將以這三組TCP來做速度監控與位置監控。任一個安全TCP的位置、速度超過安全設置,都會觸發安全違例。
速度監控閾值參考「機器人安全參數」中的工具最大速度。位置監控參考「虛擬邊界」中所定義的機器人安全空間。在下拉方塊中可以選擇現有的TCP或自訂直接設定XYZ的值,當選擇現有TCP時,變更X、Y、Z輸入欄位中的值時,下拉式選單中的TCP名稱會變成自定義,表示是新定義的TCP。如果全域變數中對應座標系中的值被修改,和目前安全設定中使用到的座標系的值不一致,會在工具定義處顯示"!"提醒圖示。當選擇自訂輸入數據,直接編輯X、Y、Z、Rx、Ry、Rz的值以及包絡球的球半徑。
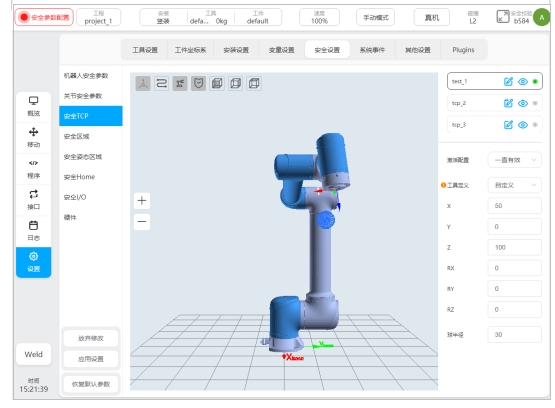
每個安全TCP可以被配置為五類啟動模式:停用、一直有效、自動模式有效、安全組合配置1、安全組合配置2。當三個TCP都是停用狀態時,安全控制系統預設使用法蘭座標系,球半徑為50mm。在TCP配置清單上,顯示對應TCP的配置狀態,如果某TCP被停用,則對應狀態灰顯。配置的安全TCP可以在3D顯示區中顯示座標係以及包絡球,並且可以透過對應TCP名稱後的  圖示進行顯示和隱藏的切換。點選TCP名稱後的
圖示進行顯示和隱藏的切換。點選TCP名稱後的  圖示可以修改TCP預設名稱。未被停用的安全性TCP會顯示
圖示可以修改TCP預設名稱。未被停用的安全性TCP會顯示  ,否則會顯示
,否則會顯示  。
。
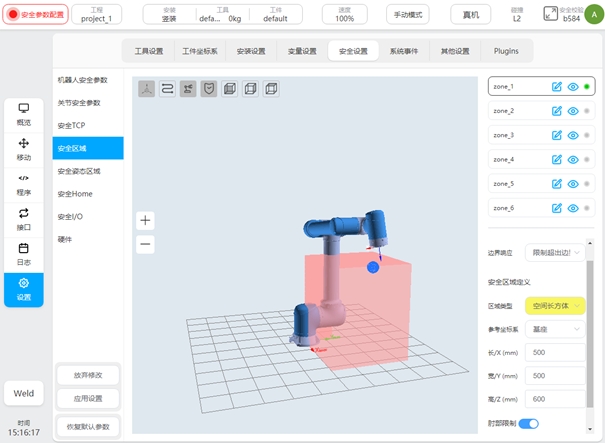
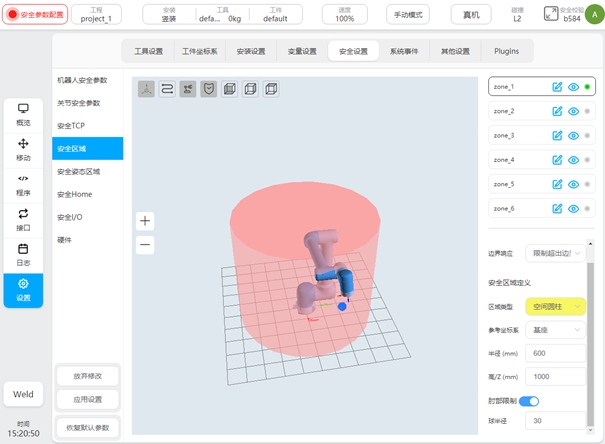
安全區域#
安全區域用來定義機器人的安全工作空間。共定義六個安全區域來限制機器人的安全工具Tcp和肘部運動所能到達的空間位置或在安全空間中的運動狀態。
安全區域定義類型包括平面、長方形、圓柱體三種形式。使用者可以設定最多6個相互獨立的空間區域。透過點擊安全區域名稱後的|D1| 圖示可以對配置的安全區域在3D顯示區中進行顯示和隱藏的切換,並且可以點擊區域名稱(如:預設名稱zone_1)後的|D2| 圖示修改安全區域名稱。未被停用的安全區域會顯示 ,否則會顯示 。
安全區域可以被配置為五類啟動模式:停用、一直有效、自動模式有效、安全組合配置1、安全組合配置2,共5種。
安全區域的邊界反應是指機器人安全工具Tcp包絡球從安全區域內部移動至外側或從外側移動至內部時所產生的反應動作,共有2種反應模式,即:限制超出邊界、進入區域觸發reduce模式。當選擇限制超出邊界時,安全區域所定義的安全工作空間被定義為機器人唯一允許運動作業的空間。任何使機器人安全工具Tcp向安全區域外側移動的操作,在接近安全區域邊界時都會觸發防護性停止。若進一步使機器人安全工具Tcp移動並超出安全區域邊界,則會觸發SS0;當選擇觸發reduce模式時,安全區域所定義的安全工作空間則被定義為需要以縮減模式安全參數進行安全監控的限制下進行運動。機器人安全工具Tcp離開安全區域內部後,安全模式會自動切換回正常模式,直到安全工具Tcp再次回到安全區域內部。
空間區域中還可以設定是否包含肘部限制,肘部的空間範圍以球半徑形式進行設定。若啟動肘部限制,則面向安全工具Tcp的所有安全區域相關限制同樣適用於肘部。
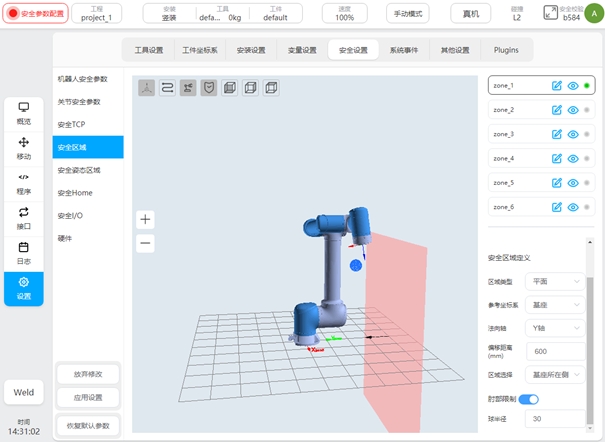
當配置區域類型為平面時,平面區域的參考基準是基於世界座標系/基座/設定的工件座標系,透過設定平面法向、法向偏移量從而確定平面。平面的設定可以透過「區域選擇」配置生效區域,且對應的方向在3D區域中透過黑色箭頭顯示。
當配置區域類型為空間長方體時,長方體區域的設定基準是基於世界座標系/基座/設定的工件座標系,以工件座標係為長方體的一個角點,三個座標軸方向分別對應長( X)、寬(Y)、高(Z)。長寬高的設定範圍為-3000mm—3000mm。
當配置區域類型為空間圓柱體時,其設定基準是基於世界座標系/基座/設定的工件座標系,以工件座標係作為圓平面的圓心,Z方向指向高度方向,可以設定半徑、高度。半徑取值範圍為0-3000mm,高度取值範圍為-3000mm—3000mm。
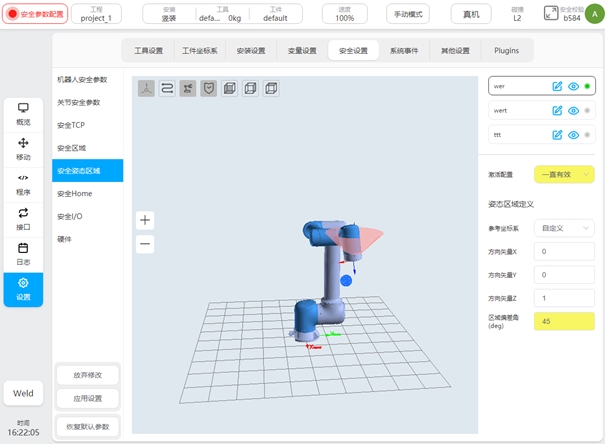
安全姿態區域#
安全姿態區域指在機器人基底座標系下,圍繞某個方向向量形成的圓錐角。安全姿態區域限制了機器人安全工具TCP的Z軸在空間內的姿態允許活動區域。使用者最多可以設定三個姿態區域。透過點擊姿態區域右側名稱後的 圖示可以顯示或隱藏單一姿態區域,預設為顯示。且可點選名稱後的 圖示修改姿態區域名稱。未被停用的姿態區域會顯示 ",否則會顯示 。
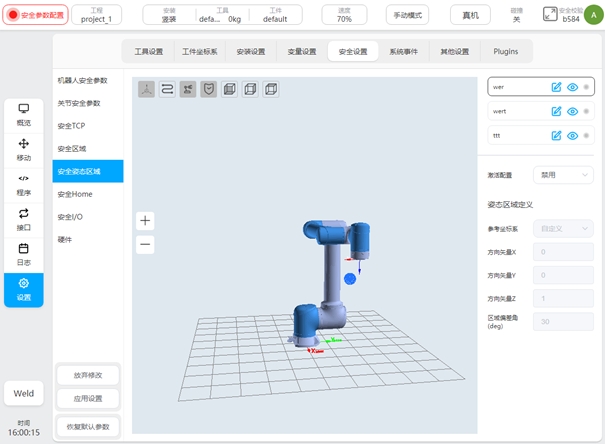
安全姿態區域的啟動配置有:停用、一直有效、自動模式有效、安全組合配置1、安全組合配置2,共5種方式。安全姿態區域不同於安全區域,只約束TCP的Z軸方向。任何使安全工具TCP Z軸向安全姿態區域外側旋轉的運動,在接近安全姿態區域邊界時會觸發防護性停止。若進一步移動使安全工具TCP Z軸超出安全姿態區域範圍,則會觸發SS0。
安全姿態區域定義的參考座標係有3種方式:自訂、取得目前TCP姿態、透過預先定義的工件座標系定義。當選擇自訂時,手動修改方向向量X、Y、Z的值,該值描述的是在機器人基底座標系下的值;當選擇取得當前TCP姿態時,以當前TCP的Z軸方向作為姿態區域的基準方向,且將方向轉換到機器人基底座標系下描述,顯示到向量方向X、向量方向Y、向量方向Z上, 若手動修改值後,會變成自訂方式.;當透過工件座標系定義時,以工件座標系Z軸方向作為姿態區域的基準方向,轉換到機器人基底座標系下,同樣地手動修改值後,會變成自訂方式。
如果在外部對工件座標系方向做了修改,在參考座標系處顯示提醒  提醒圖示。區域偏差角取值5-180度。例如:
提醒圖示。區域偏差角取值5-180度。例如:
安全Home#
安全Home設置,安全Home監控將同步「其他設定」頁面中的Home位置設定。如果安全Home設定中的位置和「其他設定」中的Home位置不一致,在「同步Home設定」處顯示提醒 提醒圖示。若不同步設置,系統的Home位置以安全設定中為準。移動介面中「依主歸位」回Home點操作,及機器人其他連接埠(如2001埠)Home訊號的輸出,皆以安全控制器的設定為準。 「其他設定」頁面中的Home點僅作為記錄,不作為Home點判斷依據。可設定Home點的監控閾值,範圍為1-5°。
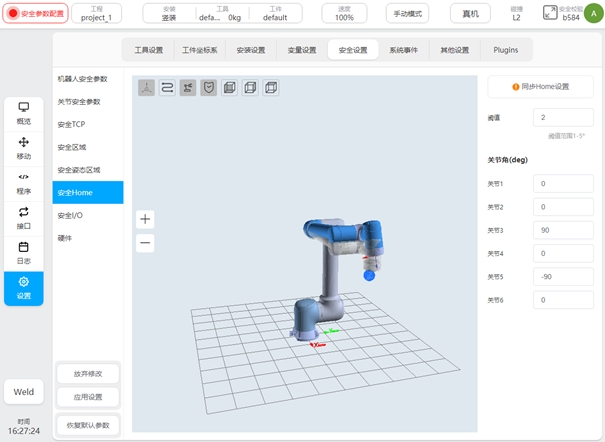
當選擇同步Home位置後,顯示Home位置的關節角度。且3D模型顯示區機器人模型刷新到對應位置。
當設定了安全home位置,且在安全I/O中,配置了home位置輸出(詳見第6.2.3.8章節),則當機器人所有的關節角度,在所設定的home位置範圍內(設定值-閾值,設定值+閾值)並保持500毫秒(系統預先定義且無法設定),對應的安全I/O通道會輸出安全home訊號。
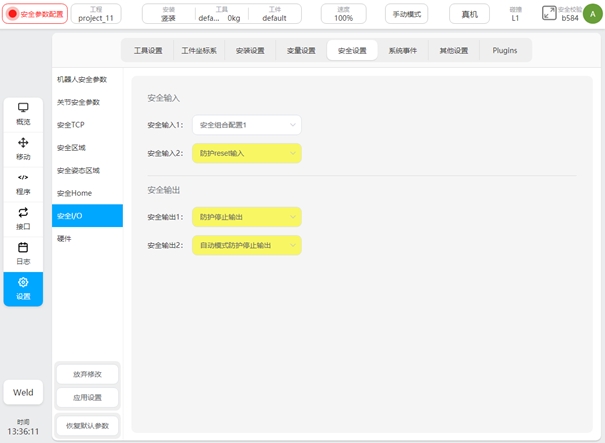
安全IO#
安全IO模組上包含兩路可設定安全輸入連接埠和兩路可設定安全輸出連接埠。
安全輸入功能包含:
防護reset輸入: 當防護停止發生時,觸發該端口,機器人恢復正常狀態
自動模式防護停止輸入:當機器人在自動模式下觸發此連接埠時,機器人執行防護性停止
自動模式防護reset輸入:當自動模式防護停止發生後,觸發該端口,機器人恢復正常狀態
Reduce模式輸入:觸發該端口,機器人將過渡到縮減模式,縮減模式對應的安全參數將啟動。機器人可能會在過渡過程中減速以適應縮減模式所設定的安全參數
安全性組合配置1 / 2:當安全組合配置1或安全性組合配置2埠被觸發時,所有被配置屬於安全性組合配置1或安全性組合配置2的安全性特徵,包括安全工具、安全區域、安全姿態區域將會被啟動並開始監控
安全輸出功能包含:
防護停止輸出:當機器人處於防護停止狀態時,觸發該端口
自動模式防護停止輸出:當機器人處於自動模式防護停止時,觸發此連接埠
Reduce模式輸出:當機器人處於縮減模式時,觸發該端口
HOME位置:當機器人處於安全HOME位置時,觸發該端口
硬體#
包含啟用外部IO進行模式切換和三位置啟用輸入
啟用外部IO進行模式切換:啟用此項,可透過外部IO進行手自動模式的切換,此時介面狀態列上的模式切換功能無效
三個位置啟用輸入:啟用此項,當機器人處於手動模式下,僅當示教器上的三位置開關處於中間位置才可以移動機器人,機器人在移動過程中任意時刻三位置開關處於非中間位置時都會觸發機器人的暫停