系統概述#
工程管理#
系統支援創建多個工程並對其進行管理,工程資料包含機器人程式、工程全域變數、工程設定等資訊。系統啟動載入時,會根據系統設定載入目前工程數據,其他工程數據不可以在目前工程中使用。

使用者管理#
系統支援建立多個使用者並對其進行管理,使用者權限等級分為Operator、Programmer、Maintainer、Admin。具體權限說明如下:
Operator
允許選擇工程、運行程式、手動jog機器人、查看機器人狀態等
Programmer
Operator使用者權限
編程機器人程式、工程配置
預設使用者名稱default,初始密碼123
Maintainer
Programmer使用者權限
系統更新
Admin
Maintainer使用者權限
使用者管理
單一使用者名稱admin,初始密碼123
使用者頁面概覽#
如圖所示,介面整體主要分三部分區域,頂部狀態欄,左側導覽欄,右側內容區,其中內容區是根據選擇左側導覽列的不同而呈現不同內容(子頁面)。導覽列下方是插件入口及系統日期和時間。
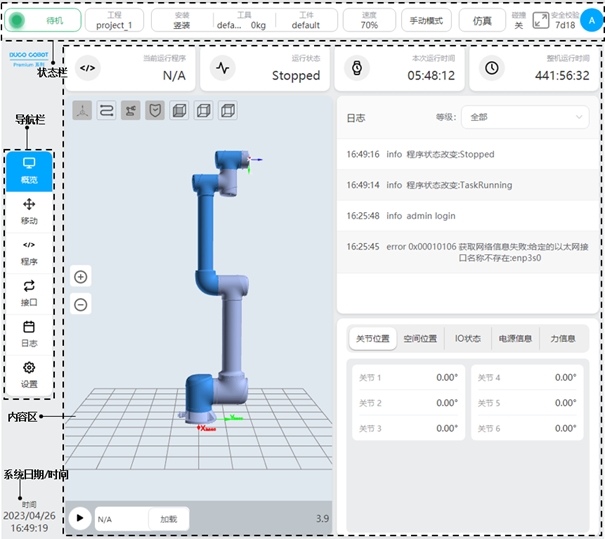
狀態列裡主要展示資訊有:機器人狀態指示燈、目前工程、機器人安裝方向、目前工具座標系和工件座標系相關資訊、速度百分比、操作模式、碰撞偵測設定資訊、安全校驗碼、使用者資訊。
導航列包含概覽、移動、程式、介面、日誌和設定6個圖示導航,點選導航列圖示會對應切換內容區裡顯示的內容,各頁面主要內容如下:
概覽頁面是生產視圖頁面,可以選擇要執行的程序,顯示程序狀態、系統運行時間、系統日誌以及機器人系統基本資訊。
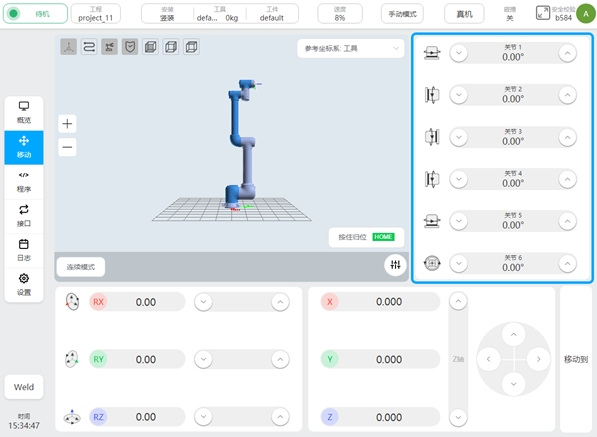
移動介面允許使用者手動操作機器人,設定手動移動的座標系及運動方式。
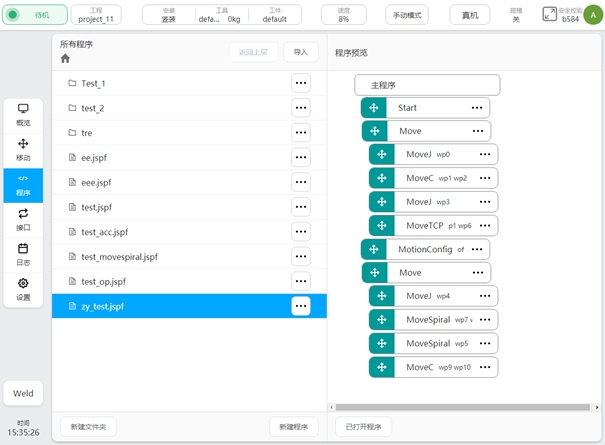
程式介面是機器人的主要程式設計頁面,使用者可以管理工程中的程式文件,以及透過提供的圖形化程式設計環境編寫機器人任務。
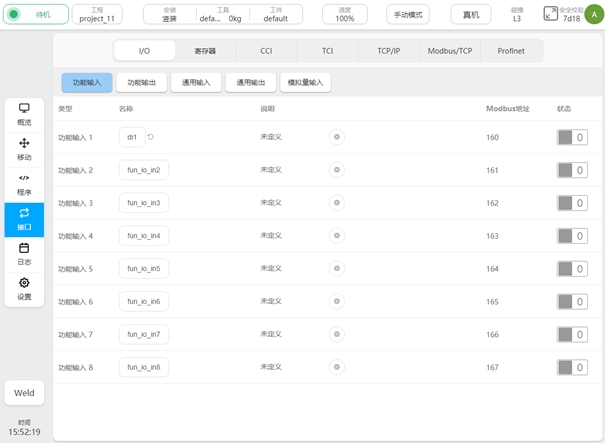
介面介面允許使用者在此頁面下配置機器人所有對外的互動接口,包括數位輸入輸出、類比輸入輸出、TCP/IP接口,以及其他工業現場匯流排接口。
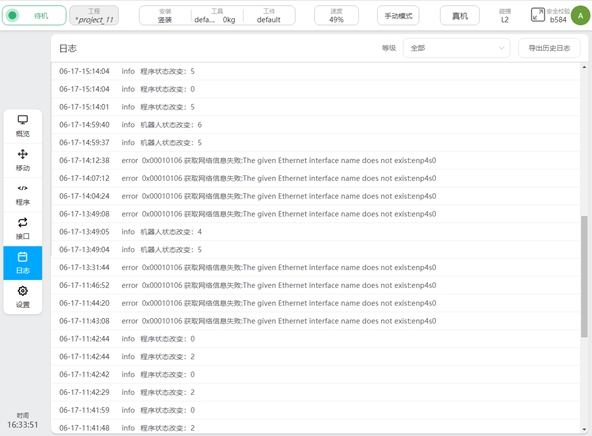
日誌介面顯示本次開機系統的日誌資訊。
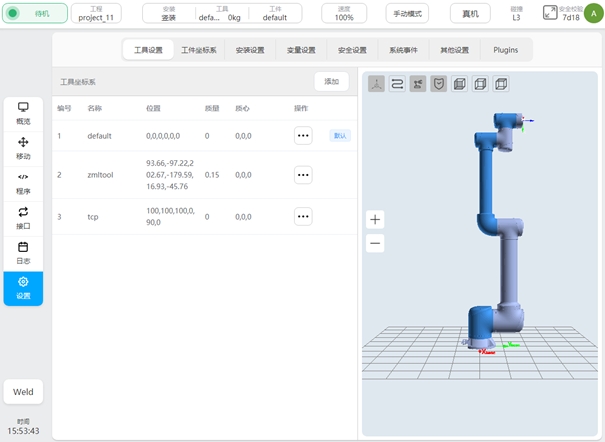
設定介面,目前工程配置設置,包含座標系統的設置,安裝方向的設置,以及安全設定等。
多終端連接#
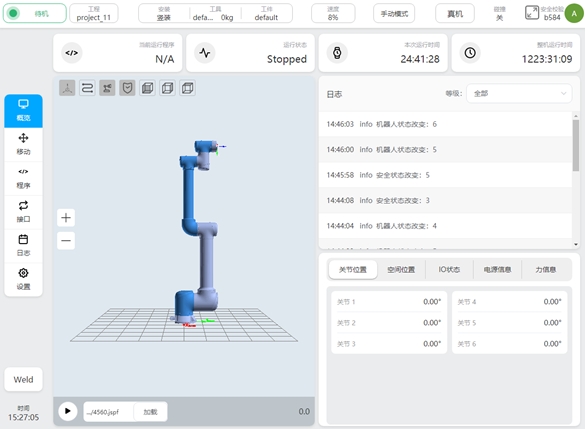
系統支援多台終端同時連接,但只有一台終端機擁有控制權,可以進行程式的運作、系統的配置等全部功能。其他終端只有查看的權限,不能運作機械手臂及修改設定資訊等。無控制權的終端顯示如圖:
當其他終端要取得控制權時,可以點選左上角的「取得控制權」按鈕。跳出如下對話框,點選「確定」按鈕取得系統的控制權,此時原來有控制權的終端將失去控制權。
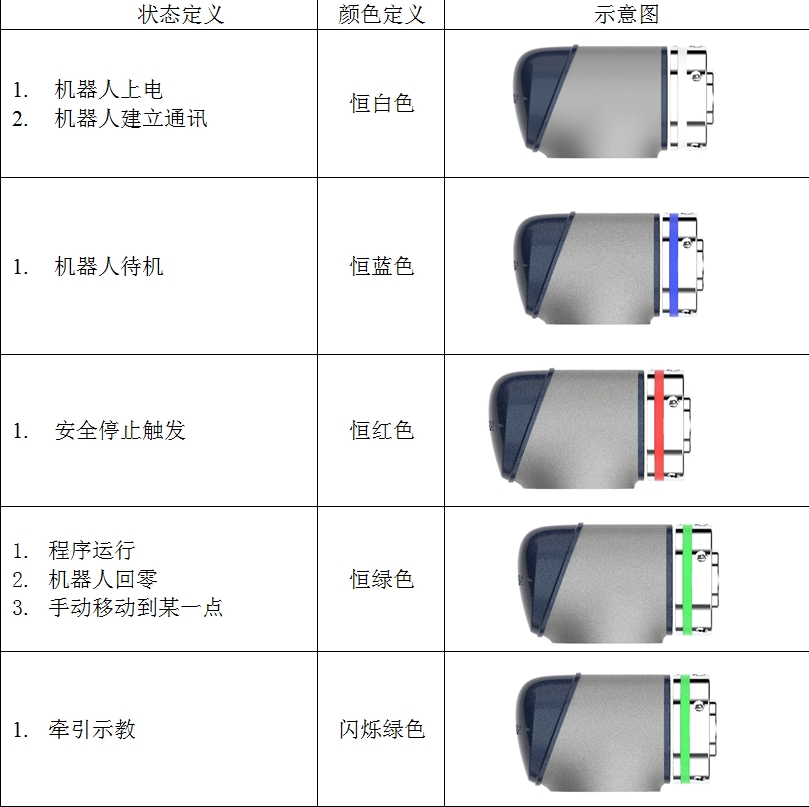
末端灯带指示#